太阳能电池板自动跟踪系统设计及优化
2022-04-26徐峥悍马伟宁韩阳杨爱民齐西伟
徐峥悍,马伟宁,韩阳,杨爱民,齐西伟
(1. 华北理工大学 冶金与能源学院,河北 唐山 063210;2. 华北理工大学 管理学院,河北 唐山 063210)
我国于上世纪末开始研制单轴太阳能跟踪器,并且完成了对东西走向的自动跟踪,接收器的信号接受和工作效率也因此得到显著提高。美国加利福尼亚州在1998年成功研制了ATM两轴式太阳能跟踪器,在太阳能接收面板上安装了一个集中式太阳光束的透镜,通过这种方法可以使太阳能接收面板同时聚集到更多的太阳光束,显著提高了太阳能利用率。近年来,国内也有很多专家学者逐渐开展了这方面技术的研究:邱燕通过比较光电追踪、视日运动轨迹跟踪2种方式,选择太阳能自动跟踪系统方案,并完成了跟踪系统的实验验证[1];李嘉晟等人采STM32F103R8T6单片机的半遮挡式四象限光电检测法结合始终控制法的双轴太阳跟踪控制系统,设定每15 min检测一次天气情况,判断跟踪方式,实验结果表明该系统在一定程度上提升了太阳能利用率[2];董士韦等人采用光电追踪方法,利用光敏器件采集不同位置的光照强度,利用电、机、光集成技术,实现方位角和高度角的双轴跟踪[3]。
目前,追踪系统中实现追踪太阳能量的方式有很多,但是普遍采用如下3种方式:一种是监测视日运动轨迹追踪,一种是光电追踪方式,还有一种是两者混合的追踪方法。传统的跟踪方式一般都具有跟踪效率低、实时性不强、应用场景单一等缺陷。该研究太阳能电池板自动跟踪系统设计实现对太阳光线的实时追踪,设计应满足以下要求:
(1)具备自动控制和手动控制2种模式;
(2)实时显示当前光照的AD值;
(3)自动实时跟踪太阳的行踪并进行转向;
(4)通过太阳能电池板给18650锂电池进行充电,用于整个系统的供电。连续阴天,电池电量不充足时也可以通过5 V直流电源对系统进行供电。
1系统需求
1.1 研究方法
(1)明确设计任务和需求,查阅STC89C51单片机资料,整理光线采集模块,按键模块,步进电机驱动模块,指示灯模块等相关作用、线路图等内容;
(2)根据任务和所需要求,构思可行的系统方案,使用visio绘出系统框图,如图1所示。

图1 系统框图
1.2 思路分析
设计单片机最小系统,包括STC98C51芯片,一个晶振电路和一个复位电路;然后设计步进电机驱动模块,可同时控制2个步进电机的转向,协调同步控制太阳能面板,使其可以全方位的旋转,以便更加灵活追踪太阳的照射方向;其次设计光照强度采集模块,将光信号转换为数字信号;指示灯模块设计,用于表明系统当前所处的模式,自动模式为绿灯,手动模式为红灯;设计LCD显示模块,LCD1602液晶显示4个光敏的光照AD值。软件方面的设计,根据上述各个模块的功能及要求,编写程序,使其完成太阳光线自动和手动追踪的任务;使用Proteus和Keil软件进行仿真,再分模块进行仿真测试,最终确定具体设计方案按以上思路进行硬件组装并测试。
2设计方案
2.1 单片机最小系统
采用STC89C51作为控制芯片。根据系统设计,满足系统可以随时改写调整程序并且在断电情况下可自主保护数据的要求,该设计采用STC89C51作为单片机芯片,同时该芯片还具有高效可靠,使用方便等优点。由一个复位电路、一个晶振电路和一个电源电路组成单片机最小系统,其电路原理如图2所示。
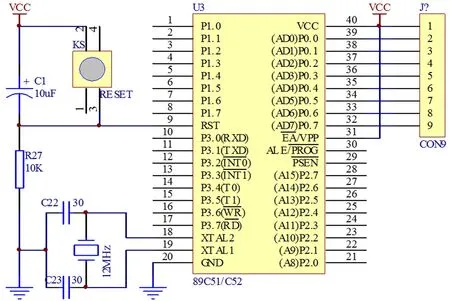
图2 单片机最小系统电路图
该芯片的工作电压一般为3.8~5 V,且由40个I/O口和RAM、EEPROM、看门狗、2个16位定时/计数器等部分组成,由它集中处理各个模块的数据,是本次设计的核心芯片;复位系统主要由独立按键、10UF电解电容、10 kΩ电阻等部分组成,接于STC89C51芯片的RST口,主要用于将单片机恢复到原始设置状态,且内部的电子器件运行状态全部初始化,所有数据全部清零;STC89C51芯片使用的晶振一般有2种规格,根据震动频率不同可分为12 MHz和11.059 2 MHz,在该项设计中采用的是11.059 2 MHz晶体振荡器。由于控制芯片内有振荡电路,所以在构建晶振电路时,外部只需连接电容器和晶振即可,根据STC89C51芯片的特性,所连接的电容容量常用22 pF或30 pF。
2.2 步进电机驱动
由2个型号为28BYJ-48的步进电机和1个型号为ULN2803的步进电机驱动芯片组成步进电机驱动模块,该模块的功能是实现太阳能面板上下左右4个方向的转动。步进电机作为一种用于转向的专用电机,使用一般的交流电源或直流电源都不能正常工作,因而需要加上专用的步进电机驱动芯片进行驱动,控制电路和换相电路共同构成步进电机的驱动电路。图3是系统采用的步进电机驱动电路图,选取ULN2803作为核心芯片,该芯片的输入端为1号到8号引脚,输出端为11号到18号引脚,接地端和电源端分别为9号、10号引脚。ULN2803的OUT口分别与2个步进电机的2、3、4、5口相连接,INT口与单片机的P2^0~P2^7相连。
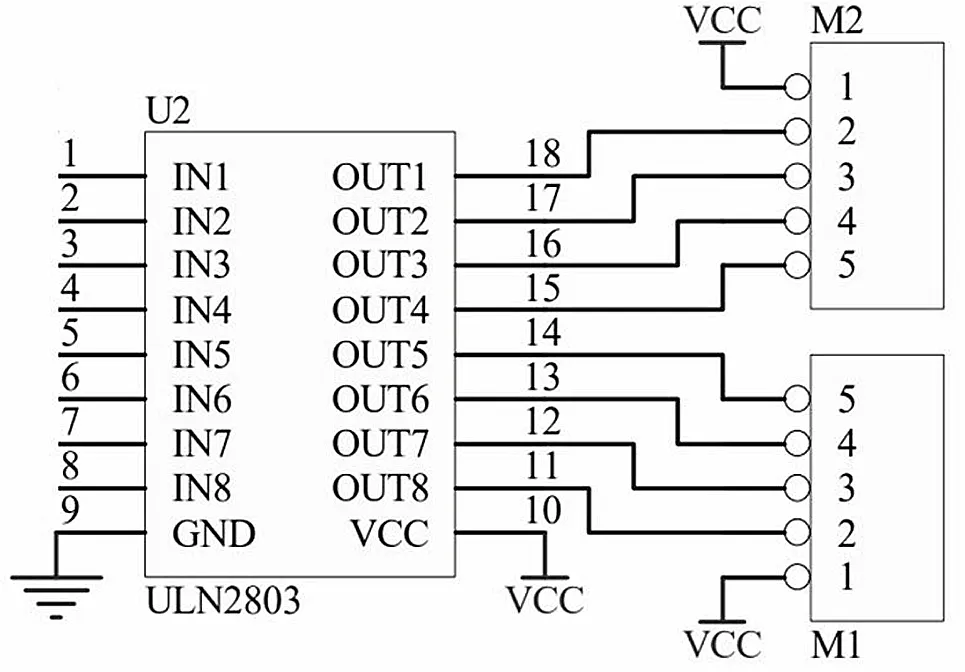
图3 步进电机电路图
基本工作原理:若在IN1引脚输入高电平信号,则18引脚输出低电平信号;对应的,若IN1引脚输入低电平信号,那么18脚输出高电平信号。设计采用的步进电动机正常工作电压是直流5 V,与驱动芯片的9号引脚相接,芯片其他引脚控制步进电机正向或者反向转动。引脚输入高电平经处理后输出低电平。一个ULN2803芯片可控制2个步进电机,完全符合本次设计的双转向轴的要求。
2.3 信号转换模块
光敏电阻是利用某些特殊材料在特定波长的光波下,电阻急剧减小的特性制作而成的一种电阻可以随光照强度变化的电阻器。当光照强度发生变化时,其阻值将产生相应变化。光敏电阻可将接收到的光信号转换成电信号。同时光敏电阻是无任何正、负极性之分的电阻元件。光敏电阻位置分布情况如图4所示。
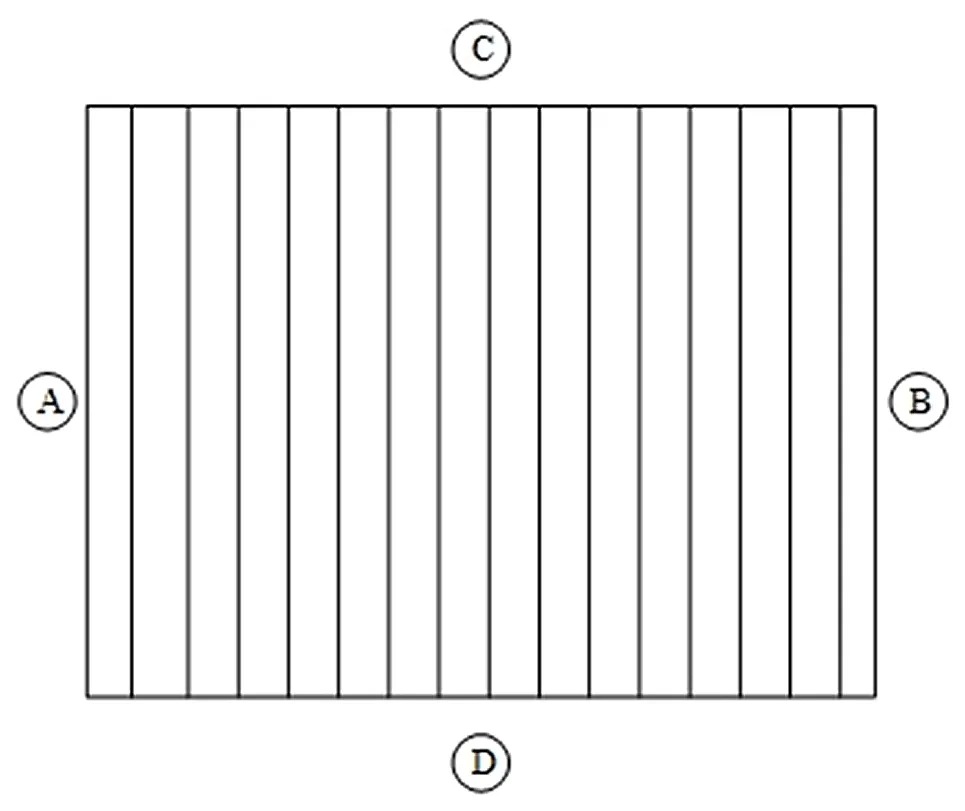
图4 光敏电阻位置示意图
光敏电阻接收到光信号后将其转换成对应的电信号,随后单片机控制模块将输入的电信号进行分析运算后,步进电机驱动模块即可接收其输出的控制信号,进而步进电机旋转以调整太阳能光板位置。模数转换芯片电路图如5所示。假设上下左右的光敏电阻分别为CDAB,那么光敏电阻A就负责对左边光照强度进行检测,当A处的光照强度变弱时就会发送信号给光电转换模块,转换为电信号后再把信号传送给单片机控制模块,经其快速处理后,输出信号驱动电机转动使太阳能光板跟着光线转动。
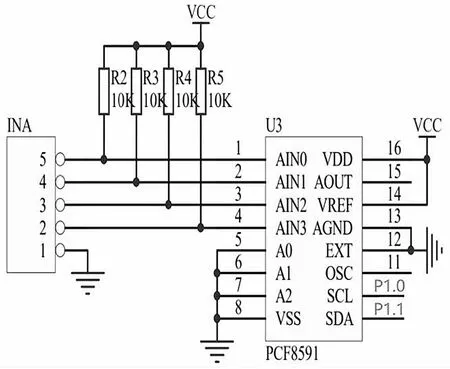
图5 PCF8591电路图
2.4 总体设计
系统总体流程图如图6所示,进行定时器模块、光电转换模块、步进电机驱动模块的初始化,芯片扫描按键模块进行手动、自动模式选择,并有相应的指示灯提示当前模式状态。
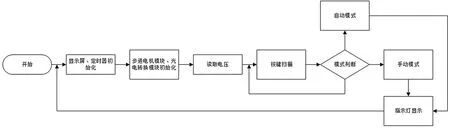
图6 系统流程图
2.5 步进电机工作模式
设计采用的是51单片机作为控制整个系统的核心部件,最终目的是根据光照强度快速准确地控制步进电机转向。由光照强度不同而形成电压差,可设4个方向光敏电阻元件探测到的电压值分别为U1、U2、U3、U4,经模数转换将电信号传输至单片机处理,判断光照强度进而驱动步进电机转向。步进电机驱动模块流程图如图7所示。
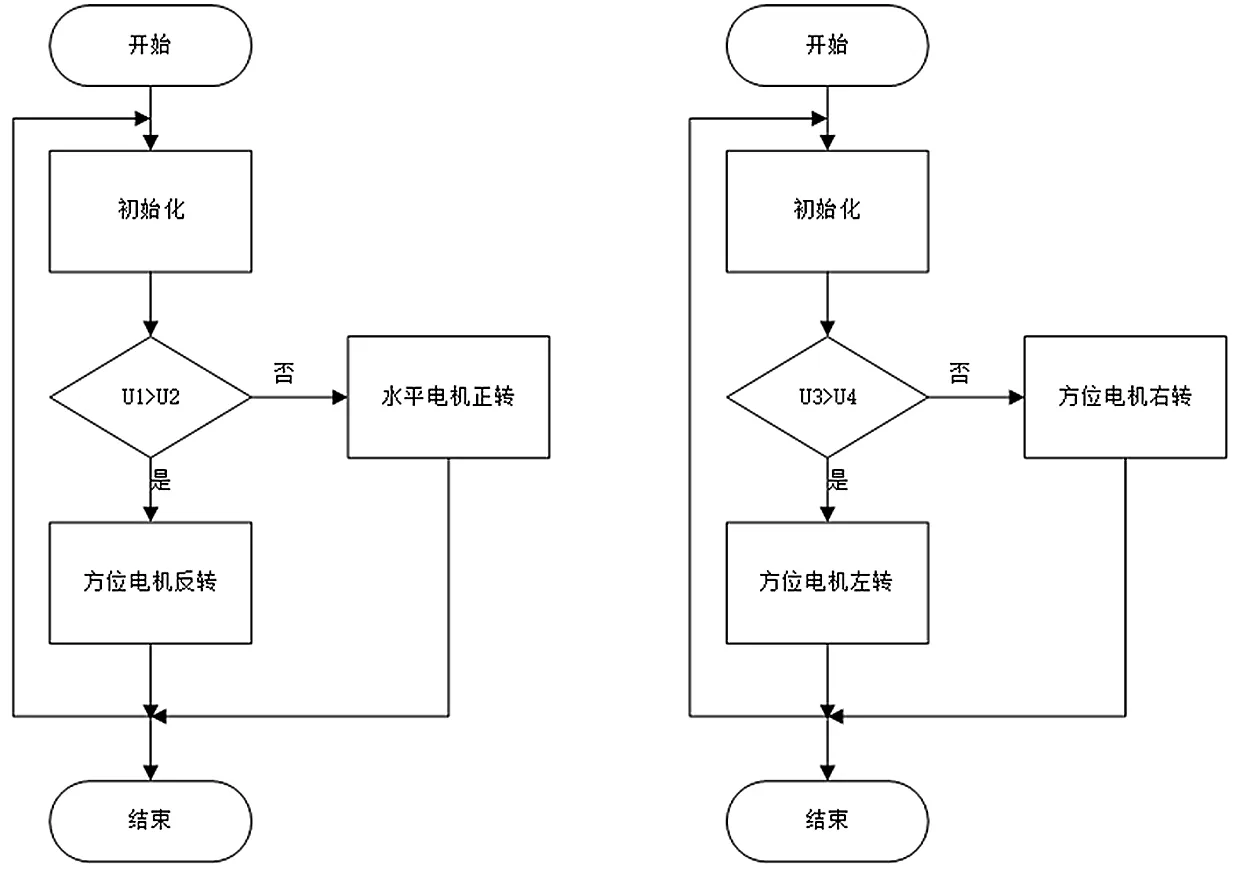
图7 步进电机流程图
2.6 数模信号转换模型构建
数模信号转换作为系统设计的重要组成部分,不同光信号由光敏电阻采集,转换成电压形式的数字信号,通过PCF8951芯片计算和内部电压采样模块采样后,输出数字信号送入STC89C51芯片中计算处理,最后STC89C51芯片输出信号驱动步进电机动作。其流程图如图8所示。
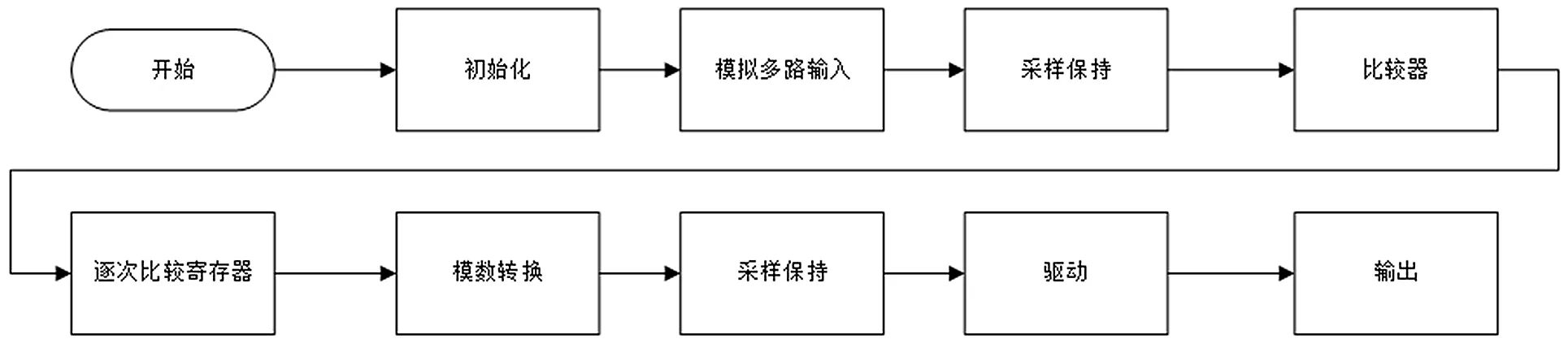
图8 模数信号转换流程图
作为系统设计的重要部分,设计的A/D转换模块芯片是PCF8951型号,有4路8位A/D输入,属于逐次比较型,内含采样保持电路,1路8位输出,内含有ADC数据寄存器。光敏电阻将采集的光信号通过模数转换模块输出为电压形式,PCF8951芯片计算和内部电压采样模块采样后,输出数字信号进入STC89C51芯片中计算处理,最后STC89C51芯片输出信号控制步进电机动作。
3系统功能展示与结果分析
按照仿真图焊接实物图:单片机芯片、LCD1602和步进电机的位置合理分配,背面的排线有条理性,避免杂乱。安装按键、电阻等零件,在步进电机上安装光敏电阻和太阳能电池板,完成后进行测试。图9所示为太阳能电池板跟踪系统整体实物情况,图9中是各个模块的排列情况,充分利用洞洞板的有限空间,尽可能用焊锡丝连接背面的电路,保证系统硬件线路的准确性。

图9 硬件总体分布图
首先进行四象光电检测模块的测试。当光照强度发生变化时,光敏电阻也产生相应的变化,可将接受到的光信号转换成电信号。以手电筒作为模拟光源,光电信号指示灯即可随光源强弱调节自身亮度。其次是手动/自动模式转换调试。系统有五个按键,按键模块由单片机控制,且可以在自动模式和手动模式中通过按键自由切换,并有相应的LED指示灯表示当前模式:红色LED灯亮表示当前为手动模式 ,绿色LED灯亮表示当前为自动模式。中间按键是用于在自动模式和手动模式中切换,系统初始化默认为自动模式,在手动模式下可以通过四个方位按键控制电机的转向。从而避免偶然事件的发生,进一步提高系统稳定性。最后进行光电跟踪调试。用台灯模拟太阳方位变化引导电池板进行转动,跟踪模型通过光敏电阻感知光照强度,随后通过PCF8591模数转换芯片由单片机控制步进电机使太阳能电池板始终与光线保持垂直状态。经过以上步骤测试,证明该实物模型能够按照设计要求较好的完成跟踪任务。
可通过测量太阳高度角和方位角侧面反映出系统的跟踪精度,利用太阳角度计算器得出该系统所跟踪的太阳高度角和方位角,并与日梭万年历中的数据进行对比。通过对安徽滁州地区气象站日照时数资料整理发现,该地区年日照时数较多,多年平均日照时数为5.9 h,年总日照时数平均为2 130.9 h,且各个季节光照强度较为稳定,便于测试自然条件下的跟踪情况。经过对该地区太阳高度角和方位角的测量与计算,结果如表1所示。
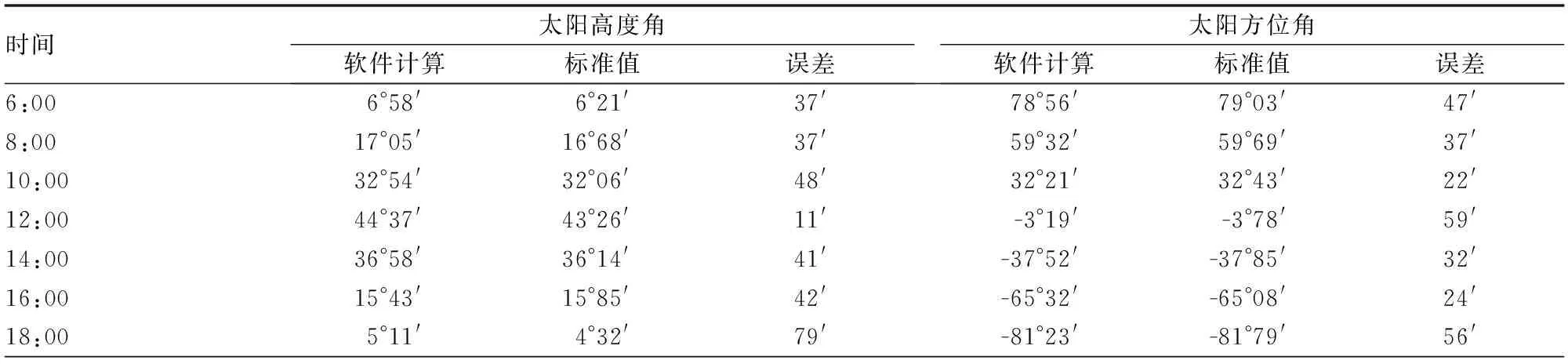
表1 太阳实际角度与测量角度对比
初始时系统设置为手动模式,红色LED模式指示灯亮起,调节太阳能面板的初始位置,使之正对太阳升起方向,面板调节完毕后,系统设置为自动模式,绿色LED模式指示灯亮起。在该模式下,光敏电阻接受光信号后,由数模转换模块将光信号转换为电信号,计算形成电压差。单片机控制模块将输入的电信号进行分析运算后自主判断电压大小,即光照强弱,再输出控制信号给ULN2803控制芯片,进而控制双轴步进电机旋转太阳能光板位置,开始自动旋转追踪太阳光照,即可改变太阳光入射角度,并开始记录。
由表1可知,双轴跟踪系统所测得的太阳角度与实际角度基本一致,绝对误差不超过1°,均在可接受误差范围内,充分说明双轴跟踪系统在对太阳角度的追踪过程中符合太阳运转规律,转向精度符合设计要求,从而大幅提升太阳能的利用效率。
双轴系统设计的优势在于能够全方位的旋转自动追踪太阳的照射方向。双轴跟踪与单轴跟踪太阳能电池板输出功率如表2所示,同种条件下双轴跟踪系统的输出功率一直高于单轴跟踪系统的输出功率,且均呈现上午逐渐上升,下午逐渐下降的变化趋势,这与太阳在一天内的能量输出吻合。综合计算12 h内两电池板的输出功率,双轴跟踪系统的总输出功率提升约33%。

表2 双轴跟踪与单轴跟踪输出功率
4 结论
(1)该设计采用一种双轴跟踪模式。光电检测双轴追踪能够自主调节太阳光入射角度,提高了系统的追踪进度,进一步提升太阳能转换效率。通过对自然条件的模拟,采用自动、手动模式随意切换的设计,解决了一般跟踪系统应用条件单一的问题,保证了装置持续工作的稳定性。
(2)提出了高效跟踪太阳能轨迹的实践方法,并且利用太阳能电池板给锂电池进行充电,可用于整个系统的供电,自然条件不理想时可通过5 V直流电源提供能量来源,在没有额外电源输送时依然能自主工作。
(3)双轴跟踪系统2个步进电机通过小角度动作,对太阳能电池板的旋转控制在跟踪精度上有了明显的提升,其输出功率对比单轴跟踪系统提升约33%,这将进一步改善太阳能的利用效率。
