协同反水雷作战任务规划系统总体研究
2022-04-26胡红波
曹 璐,胡红波
(1.中国船舶集团有限公司第七一〇研究所,湖北 宜昌 443003;2.海装武汉局驻宜昌地区军事代表室,湖北 宜昌 443003)
0 引言
有人/无人平台协同作战是在分布式协同作战理念指导下应用较为广泛的典型作战模式,为了提升反水雷作业安全性,反水雷母舰不进入雷区,在其指挥下由空中反水雷系统、水面无人反水雷系统、水下无人反水雷系统进入雷区执行反水雷任务[1]。各种反水雷装备联合起来协同工作,在功能、用途、使用方式等各个方面形成优势互补,最大限度地发挥各型反水雷装备的综合作战效能。
协同反水雷任务规划是指在满足战术和技术指标、作战任务要求、反水雷平台和武器性能约束、战术使用条件等的前提下,将不同的作战任务合理地分配给类型、战斗力和使用条件各不相同的反水雷武器平台,其目的是实现资源的优化配置,提高反水雷武器平台协同作战能力、动态战场适应能力以及整体作战效能[2]。协同水雷任务规划是一个多约束、强耦合的复杂多目标优化与决策问题,涉及到任务、环境、平台等多方面因素。因此本文通过分析反水雷任务规划的作用及功能,构建有人/无人协同反水雷任务规划总体框架,明确协同任务规划关键技术及解决途径,有力推动反水雷作战指挥控制技术的发展。
1 反水雷任务规划作用与定位
反水雷作战指挥控制的使命任务就是掌握战场态势,统筹作战资源,指挥和控制反水雷兵力作战,监控与协调作战过程,最大限度提高反水雷作战效能[3-4]。其特点是以信息技术为基础,以信息环境为依托,以网络为中心,用数字化设备将反水雷指挥、控制、通信、计算机、情报、专家辅助决策等系统联为一体,构建反水雷作战的多维信息空间,实现各类反水雷作战信息资源的共享与交换[5]。
反水雷指挥控制贯穿于反水雷作战全过程,具体包括作战任务生成、作战兵力配置、作业计划制定(含人工制定和根据战场感知自动生成预案)、作业计划执行(含依照计划执行和根据战场态势辅助决策或自动择优)、作业效果评估(含建立效果评估模型、生成效果评估报告)。反水雷作战指挥控制过程如图1所示。

图1 反水雷作战指挥控制过程示意图Fig.1 Diagrammatic sketch of MCM command and control process
如图1所示,反水雷任务规划处于反水雷作战指挥控制的重要阶段,获取作战任务后,通过任务规划执行下一步反水雷行动。反水雷作战任务规划主要包括作战模式规划、作战兵力配置、作战计划制定等。作战模式规划根据不同作战行动(水雷清除任务、水雷侦察任务、导航反水雷任务和疏通航道等),提供具有针对性的任务规划向导,并支持作战模式的扩展;作战计划制定根据反水雷战斗命令制定的详尽作战计划,包括猎扫雷制度、作战兵力配置、线路配置、效果预测、行动方案等,解决在满足战术和技术指标、作战任务要求、反水雷平台和武器性能约束、战术使用条件等前提下,将不同的作战任务合理地分配给类型、战斗力和使用条件各不相同的反水雷武器平台,可根据向导自动生成反水雷作战计划供战术指挥员参考,也可支持人工定制作战计划。
2 协同反水雷任务规划框架
2.1 任务规划总体框架
反水雷作战任务规划可分为单舰作战任务规划、编队作战任务规划和岸基任务规划。单舰作战任务规划主要功能是完成本舰作战任务规划及制定,注重解决本舰装载的各型猎扫雷装备之间的协同反水雷作战及计划制定。编队作战任务规划主要功能是完成编队反水雷作战任务规划,作战计划制定及分发。注重解决编队各作战单元之间的协同反水雷作战,根据战场态势变化可及时调整作战计划并实施。反水雷任务规划总体框架如图2所示,该框架是一种有限中央控制的分布式控制结构。

图2 反水雷任务规划总体框架Fig.2 General framework of MCM mission planning
有限中央控制的分布式控制的主要思想是通过允许同层控制实体间的对等通信以松弛递阶控制结构中的主从关系,提高底层模块的决策控制能力[6]。在有限中央控制的分布式控制系统结构中,岸基/舰队指挥中心根据作战目标确定每个反水雷编队的构成及每个编队的初始作战任务,为各反水雷编队分配任务并进行任务规划。在任务执行过程中岸基/舰队指挥中心只对编队进行高层次的综合控制,负责做出全局决策。而每个编队的战术级任务规划主要由该编队反水雷母舰指挥员和平台自主规划/控制模块协同完成,根据编队作战任务、编队成员状态信息和战场态势信息,进行局部决策。
在整个作战过程中,反水雷母舰指挥员始终监视反水雷平台执行任务的情况并保留随时干预的权利,但反水雷母舰的集中式控制仅是在各反水雷平台一定自主规划和协商之上更高层次的管理,而并非一味地向反水雷平台发布指挥遥控指令,只是在必要的时候向反水雷平台发布命令,因此其工作负荷大为减轻,使反水雷母舰控制更多反水雷平台执行任务成为可能。有限中央控制的分布式综合控制系统体系结构综合了集中式体系结构和分布式体系结构的优点,能够更好地发挥反水雷平台个体自主与集中指挥的互补优势以及反水雷母舰指挥员的主观能动性。
2.2 任务规划层次结构
针对有限中央控制结构的协同作战任务模式,协同反水雷任务规划在不同的层次关注和处理的作战任务、作战资源的细节不同,通过分层将编队反水雷作战任务规划复杂而众多的约束条件按照其抽象程度分散到不同的层次,以降低问题的难度。协同反水雷作战任务规划分为编队层任务规划、集群层任务规划和平台层任务规划。
根据任务规划分层特性可知,上层关注的问题规模较大,模糊性较强,下层关注问题规模较小,确定性较大,精度也较高。上层任务规划结果是下层任务规划结果的要求,对下层任务规划产生约束作用。不过,上层任务规划可以影响但不能够完全控制下层的任务规划,即各层在一定范围内具有自己独立的自主任务规划权,处理实际面临的战场问题,以避免传统的逐级上报的任务规划体系带来的贻误战机情况的发生。并且,任务规划层次之间存在明显的耦合性和迭代特性。
从编队层到平台层代表了一个完整的任务规划工作周期,在作战过程中,根据战场态势的变化,需要在编队层、集群层和平台层这3个层次上对任务规划进行调整,寻求对反水雷编队的最优控制。编队层、集群层和平台层在协同反水雷作战任务规划中的地位和作用如图3所示。

图3 任务规划层次结构图Fig.3 Hierarchy chart of mission planning
3 协同反水雷任务规划关键技术
3.1 作战任务分配技术
作战任务分配以初始信息为输入,包含3个主要目标:1)采用目标分群算法将整体作战任务按照任务点位置、任务属性等进行分解;2)根据分解后的作战任务需求进行配置,确定反水雷平台及其携带的装备、传感器类型与数量,形成{任务集–反水雷平台}组合,在保证任务完成概率的同时降低资源的消耗;3)基于战场情报信息,确定可能存在水雷的区域,将该区域作为反水雷平台的作战区域。
作为Agent之间进行协商的重要方法,合同网协议被广泛用于解决多智能体系统的任务分配问题,通过模仿经济行为中“招标–投标–中标”机制实现任务的委派和迁移[7]。合同网协议任务分配的基本思想是将任务的分配通过结点之间的招投标过程实现,将协商引入到招标者和投标者的双向选择过程中。当招标者有任务需要其它结点帮助解决时,它就向其它结点广播有关该任务信息,即发布任务通告(招标),接到招标的结点则检查自己解决该问题的相关能力,然后发出自己的投标值并使自己成为投标者,最后由招标者评估这些投标值并选出最合适的中标者授予任务。在招投标过程中,利用通信机制,对每个任务的分配进行协商,避免资源、知识等的冲突,使系统以较低的代价、较高的质量完成分布式任务。
3.2 编队队形控制技术
根据{任务集–反水雷平台}组合结果,确定各反水雷平台在什么时间执行什么任务,以及是否需要协作。目标属性不同其对应的作战任务也就不同,如:扫雷、探测、灭雷、探测–灭雷、探测–灭雷–确认等,针对不同的作战任务需要选择相应的装备(武器、干扰、传感器等),将任务分配给适合的反水雷平台,同时还要考虑任务的执行顺序。因此执行任务过程中反水雷平台需要聚集成一定的队形进行作业,并且在出现不确定情况时,能够通过队形重构对反水雷平台进行自适应控制。目前此类算法包括领航–跟随法、基于行为法、虚拟结构法和图论法等,它们都是通过群体中个体间的信息沟通,建立控制策略,再对个体实现逐一控制来达到预期目标。
领航–跟随法结构简单,易于理解,并且整个队形的行为由领航者直接确定,因而得到了广泛的应用[8]。该方法将反水雷平台整体拆分为两两一组,一个领航平台,一个跟随平台,通过跟随者对领航者保持一定的角度和距离来实现队形控制,根据领航者与跟随者之间的相对位置关系,可以形成不同的网络拓扑结构,即不同的队形。例如在扫雷过程中,使各个反水雷装备产生的物理场特征,通过一定的队形模拟成大尺度舰船产生的物理场,如图4所示。

图4 大尺度舰船物理场模拟Fig.4 Physical field simulation of a large-scale ship
3.3 协同区域搜索与路径规划技术
多个反水雷装备可以携带不同设备和载荷,通过区域划分,可以将各自有限的能源充分利用。同时,这样扩大了一些传感器的感知范围,而且将形成庞大的水面通信网,使得岸基与反水雷装备之间的通信更为紧密,各司其责,高效地完成协同搜索任务。但多个反水雷装备进行协同搜索任务时,势必要考虑到各自的有效路径和协调问题,否则,协同搜索反而事倍功半。
协同路径规划在满足各种约束条件(空间约束、时间约束、环境约束、任务约束等)的前提下,为每个反水雷平台规划出一条从起始点到目标点的航迹,并且使得集群的整体性能达到最优。在协同航迹规划中,航迹个体的适应度计算不仅考虑单条航迹的性能,更重要的是考虑各航迹之间的协同性能[9]。因此,对于协同航迹规划的适应度计算,在单个航迹规划适应度的基础上,增加碰撞危险代价和完成时间要求来满足空域协同和时域协同,基本流程如图5所示。
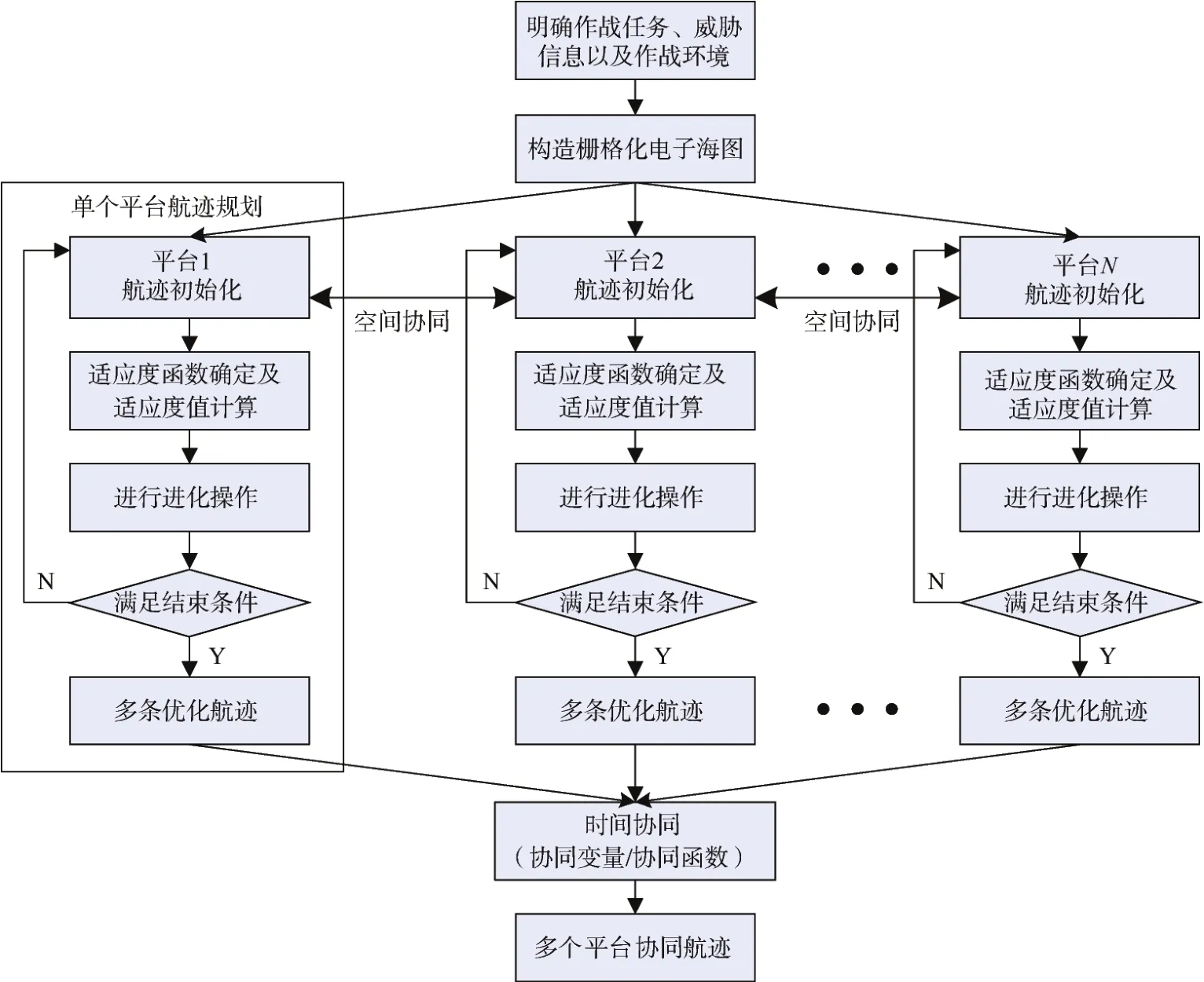
图5 协同路径规划基本流程图Fig.5 Basic flowchart of cooperative path planning
对于每个反水雷平台来说,最短的航行路径意味着:航行时问最短,能源损耗最低。考虑到反水雷平台在执行搜索任务时最主要的路径约束就是回转半径,参考了无人机路径规划中经典的Dubins路径:最简单形式的路径是由直线段和常曲率圆弧段组成,将这些直线段和圆弧连接起来就产生一条连接空间两位姿点间的飞行器最短的运动[10]。常见的如平行搜索法,每个反水雷平台沿同一方向平行进行搜索,相互之间互不影响、同步作业,如图6所示。

图6 平行协同搜索路径Fig.6 Parallel cooperative search path
考虑到摄像、激光测距传感器和声呐等设备的搜索范围限制,为保证相邻的反水雷平台得到的感知信息重复率低,覆盖密度高,多个平行作业的反水雷平台在航行至搜索区域纵向边界返回时,需要统一回转方向,统一向右(或向左)进行回转返回。d为侧扫声呐的水平扫描范围,那么相邻的反水雷平台出发时的横向间距则为4d。
4 结束语
现代反水雷作战流程复杂,自身控制单元众多并且互相交联,同时与外界作战指挥系统的交联需求也日益突出,需要建立一种基于网络为中心的综合反水雷指控系统,满足战术级、战役级、战略级不同层次反水雷作战任务需求。但在这一过程中,面对大量的信息必须不断地进行计算、判断、决策以及正确的操作,因此协同反水雷任务规划就成为研究的重点。本文根据协同反水雷任务规划的主要功能,建立了一套有人/无人协同反水雷任务规划框架体系模型,使其能够依据上级作战任务以及战场情报、实时环境信息、作战目标特性和兵力状况等多因素,将不同的作战任务合理地分配给类型、战斗力和使用条件各不相同的反水雷平台,并自动规划生成相应的作业计划,实现基于多因素综合决策的动态任务规划。分析了协同反水雷任务规划中的关键技术,给出了相应的技术解决途径,为后续协同反水雷任务规划技术的发展提供了有力支撑。
