近地高速目标接入北斗星间链路系统的快速建链方法
2022-04-26田广宇蔡文炳陈宜稳李莎莎何程许伟
田广宇 蔡文炳 陈宜稳 李莎莎 何程 许伟
(1 航天恒星科技有限公司,北京 100095)(2 天津航天中为数据系统科技有限公司,天津 300301)(3 北京跟踪与通信技术研究所,北京 100094)
2020年7月31日,北斗三号全球卫星导航系统(简称北斗导航系统)正式开通,在全球范围内提供全天候、全天时的导航定位授时和测控数传等服务。北斗导航系统由3颗地球静止轨道(GEO)卫星、24颗中地球轨道(MEO)卫星和3颗倾斜地球同步轨道(IGSO)卫星组成,GEO和IGSO卫星轨道高度35 786 km,MEO卫星轨道高度21 528 km,均配备星间链路系统,可基于星间链路技术为拓展用户提供测控数传服务[1]。
近地高速目标与北斗卫星之间的测控数传应用,是一种典型的基于北斗导航系统的天基测控应用场景。近地高速目标灵活机动、航迹不定,与北斗卫星的最大径向速度在10 km/s以上,最远通信距离超过40 000 km,具有机动性强、多普勒频移大、通信距离远的特点。北斗星间链路系统采用基于短通信时隙和窄波束的时分双工和空分多址相结合的通信体制,使用扩频长码,并且星地双方需要在百毫秒级时间内建立通信链路。近地高速目标若因机动调整导致飞行姿态和航迹发生变化,卫星无法提前预知,可能会导致星地链路中断。因此,近地高速目标接入北斗星间链路系统需要解决2个问题:近地高速目标姿态和航迹发生变化导致卫星超出当前天线波束扫描范围后如何继续保持星地链路;卫星无法预知高速移动目标姿态变化信息时如何在极短时间内完成星地双向链路高动态信号的快速捕获。
文献[2]针对导弹天基数据链中导弹的高速运动导致星弹间高动态信号频率同步问题,提出了基于频域的快速傅立叶变换(FFT)的捕获算法,仅对多普勒频率进行粗估计,无法解决伪码捕获的问题。文献[3]对高超音速飞行器北斗卫星信号快速同步捕获技术展开研究,提出了基于部分匹配滤波-快速傅立叶变换(PMF-FFT)的快速捕获优化算法和基于FFT跨异步码元部分匹配滤波方法,本质上属于并行搜索捕获技术,资源消耗和捕获时间等无法满足北斗星间链路系统要求。文献[4]针对高超声速飞行环境下载波信号快速捕获问题,提出了一种基于多普勒速率盲估计辅助及谱峰搜索范围修正的多普勒频偏和多普勒速率联合捕获方法,但无法解决伪码相位捕获问题。上述文献提出的频率同步方法,均不适用于北斗星间链路系统通信体制,而且无法解决相控阵天线窄波束对准问题。文献[5]中提出了接入北斗星间链路的系统级解决方法,根据卫星星历和历书提前计算波束指向、通信时延和多普勒频偏,在通信时隙内准确指向目标并且完成信号快速捕获,属于基于先验信息的辅助捕获技术。但是,卫星无法提前预知近地高速目标在飞行过程中的临时机动变化信息,在近地高速目标机动调整后可能会导致当前星地链路中断,所以该方法不适用于近地高速目标接入北斗星间链路系统。本文提出近地高速目标接入北斗星间链路系统的快速建链方法,可解决由于近地高速目标临时姿态调整或航迹变化引起的星地链路中断问题,实现近地高速目标飞行全程中与北斗卫星星地双向链路的稳定保持。
1 快速建链方法
近地高速目标采用相控阵天线与北斗星间链路系统建链,波束扫描范围可达360°方位角和±60°离轴角,基于波束合成技术可实现扫描范围内的波束快速成形,以达到星间链路点对点通信的目的。对于上文提出的2个问题,可采用如下解决措施。
首先,近地高速目标装备3台相控阵天线平分360°空域,空域划分示意见图1。若存在临时机动调整,则近地高速目标根据飞行姿态计算与建链卫星的角度,若超出当前天线波束扫描范围则切换至其他天线。在近地高速目标姿态调整情况下,通过切换天线波束的方法可保障星地链路的通畅。
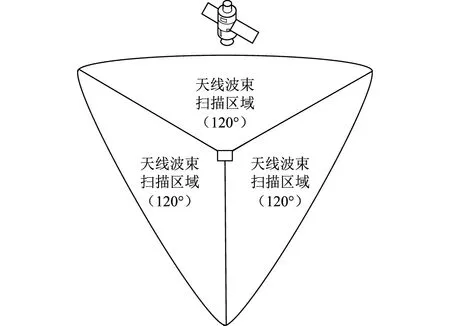
图1 卫星空域划分示意
然后,对于天线波束扫描范围内的可见卫星,在星地时间同步的基础上,基于先波束对准再频率对准的方式快速建立双向通信链路。①波束对准。星间链路系统相控阵天线基于波束合成技术实现窄波束,根据星地相对位置提前计算波束指向,并且在通信时隙内保持天线波束指向的正确性。②频率对准。星间链路系统采用扩频长码,加上较大的多普勒频移,传统2维搜索或并行搜索捕获技术无法在有限时间内完成频率和时延的估计,需要辅助捕获方法提前计算多普勒频率和通信时延。近地高速目标在接收时隙根据多普勒频率和通信时延参数辅助完成信号捕获。北斗星间链路系统无法预知高速移动目标姿态和航迹变化信息时,会导致卫星捕获难度增大,因此需要高速移动目标在发射时隙将动态特性补偿至发射信号,以辅助北斗星间链路系统完成信号捕获。
根据以上分析,本文提出双向辅助捕获方法。首先,根据北斗卫星星历和近地高速目标飞行航迹计算两者在地心直角坐标系(CGCS2000)的坐标。其次,结合飞行过程中近地高速目标的姿态数据(偏航角、俯仰角、滚动角)、天线安装参数等信息,进行星地空间坐标系转换,计算通信时隙内天线波束指向卫星的角度(方位角、俯仰角),以保证通信链路的成功建立。然后,根据两者在地心直角坐标系的坐标得到相对位置和相对速度向量,求出通信距离和径向速度并转换为通信时延和多普勒频移。最后,根据提前计算的通信时延和多普勒频移参数,在近地高速目标接收时隙辅助完成信号捕获,相对传统2维和并行捕获方法可极大地降低捕获单元数量。在发射时隙将通信时延和多普勒频偏补偿至发射信号的数据延迟和载波频率中,降低卫星天线入口信号的伪码和频率搜索单元,以辅助卫星完成信号捕获。方法原理框图见图2。
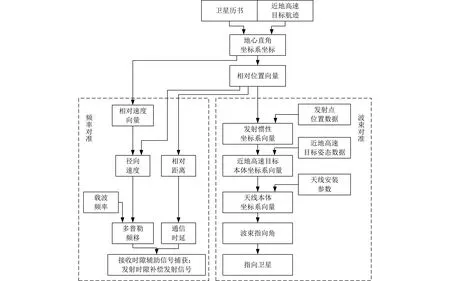
图2 方法原理框图
1.1 星历和航迹数据处理
获取北斗卫星星历和近地高速目标飞行航迹,然后计算两者在地心直角坐标系(CGCS2000)的坐标。计算卫星在地心直角坐标系下坐标的方式,主要是采用轨道外推算法,通过星历、历书或轨道根数外推卫星位置。该方式视外推算法不同,计算量不同,位置计算精度也不同。北斗卫星星历共16个参数,更新周期为1 h,卫星位置计算精度最准确,计算量最大;历书参数省去了星历中的一些摄动校正量,共10个参数,更新周期小于7天,卫星位置计算精度次之,计算量中等;轨道根数一般选用开普勒轨道六根数,卫星轨道模型为理想状态下的无摄运动轨道,因此卫星位置计算精度最低,计算量最小[6-7]。本文基于J2摄动模型轨道六根数外推卫星轨道,得到卫星在地心直角坐标系下位置向量。相比文献[8],本文无需计算惯性直角坐标系和大地坐标系下的转换过程,过程简单易于工程应用。
在轨道六根数中,半长轴a、偏心率e、轨道倾角i视作常数,飞行时刻t处的升交点赤经Ω、近地点幅角ω、平近点角M为时间的函数。
(1)
式中:Ω0,ω0,M0分别为升交点赤经、近地点幅角和平近点角的初始值。
真近点角θ、升交点角距φ、卫星轨道半径r表示为

(2)
φ=θ+ω0
(3)
(4)
则卫星在轨道平面直角坐标系的位置向量表示为
Rorb=r[cosφsinφ0]T
(5)
地心直角坐标系下卫星位置向量表示为
Rs=[XsFYsFZsF]T=RpRorb
(6)
式中:Rp=Rz(-Ω)Rx(-i),Rx,Rz均为旋转矩阵,定义如下。
(7)
(8)
近地高速目标灵活机动,航迹不定,可通过导航接收机获得其实时位置数据(坐标形式一般为大地坐标系)。将大地坐标系坐标转换至地心直角坐标系,该转换方法比较成熟,本文不再讨论[9]。
1.2 波束对准方法
首先,将卫星与近地高速目标在地心直角坐标系中的坐标转换至地心惯性坐标系,结合发射点位置数据,将星地坐标转换至发射惯性坐标系,得到发射惯性坐标系中近地高速目标指向卫星的向量;然后,转换至近地高速目标本体坐标系中近地高速目标指向卫星的向量;最后,计算天线本体坐标系中波束指向方位角α、俯仰角β,在通信时隙内波束始终指向卫星。波束指向角示意见图3。该方法本质在于位置数据在空间坐标系内的转换,公开文献中提出多种实现方法,区别在于选取的中间坐标系不同[10-13],本文不对具体转换过程展开叙述。

图3 天线波束指向角示意
1.3 频率对准方法
扩频信号的捕获是一个通信时延与多普勒频移的联合检测问题,其主要是基于伪码和频率的2维搜索、基于伪码或者频率的1维并行搜索等捕获方式。近地高速目标与北斗卫星的最大径向速度在10 km/s以上,最远通信距离超过40 000 km,对应的多普勒频移和通信时延约为±750 kHz和133 ms。
假设码速率为10.23兆码片/秒,伪码周期为1 ms,通常频率搜索间隔为667 Hz,伪码搜索间隔为0.5码片,则2维搜索方式需要搜索20 460个伪码单元和2250个频率单元,整个搜索区域单元总数高达46 035 000。即使采用并行伪码或并行频率捕获方法,也需要搜索2250个或20 460个单元,并且所需计算资源巨大。
北斗星间链路系统采用扩频长码,从理论上决定了无法采用传统捕获方法完成星间链路信号的捕获,必须使用外部辅助信息减小通信时延与多普勒频移的搜索范围,以提高捕获性能。首先,基于历书求出卫星位置和速度向量;其次,基于航迹求出近地高速目标位置和速度向量;然后,将双方的位置和速度向量转换至同一空间坐标系内,得到相对位置向量和相对速度向量;最后,求出相对位置向量的模,即为通信距离,求出相对速度向量在两者质心连线上的投影,即为径向速度,将通信距离和径向速度转换为通信时延和多普勒频移。
一般来讲,北斗卫星之间不需要在发射端进行通信时延和多普勒频偏补偿,接收方按照星历提前计算辅助捕获信息即可。不过,对于近地高速目标,由于机动调整虽未超出卫星波束覆盖范围,但是引入了较大的通信时延和多普勒频偏,卫星按照装订航迹计算的通信时延和多普勒频偏参数精度会下降,进而增大了卫星捕获难度。因此,近地高速目标需要在发射时隙将通信时延和多普勒频偏补偿至发射信号的数据延迟和载波频率中,降低卫星天线入口信号的伪码和频率搜索单元,以辅助卫星完成信号捕获。在接收时隙,近地高速目标根据辅助捕获参数完成接收信号的快速捕获。基于通信时延和多普勒频移的粗估计,可极大缩小搜索范围,结合2维搜索技术即可完成星间链路信号的快速捕获,本文对2维搜索技术不作深入介绍。
发射端对信号进行多普勒频偏补偿,一般是为了降低接收方捕获及解调难度,或者由于时钟准确度和相对运动综合导致载波频偏超出接收方捕获能力,而不得不采取发射端补偿措施。文献[14]中提出一种基于eNode B的主动式频偏校正算法,通过在基站测实现主动式的预频偏补偿技术,极大地改善了高速移动场景下多普勒效应引起的频率偏移问题。其主要实现思路是:基站对上行接收信号进行频偏估计,在下行发射信号中进行频偏预补偿,降低用户终端的捕获难度。文献[15]针对高动态环境下卫星无电线定位系统(RDSS)用户机出站接收信号多普勒频率及其变化率与入站发射信号频率偏差较大问题,提出接收、发射信号多普勒频率补偿方法,利用接收信号捕获跟踪得到的多普勒频率去补偿发射信号的多普勒频率。与其不同的是,本文所用方法一方面需要同时补偿通信时延和多普勒频偏;另一方面,在时分双工体制下,发射和接收信号间隔存在秒级延迟,接收时计算的通信时延和多普勒频移参数直接用于发射信号会导致补偿精度下降,进而增大卫星捕获难度,因此需要在接收和发射时隙分别计算通信时延和多普勒频移参数,以满足通信需求。
地心直角坐标系下卫星位置向量表示为Rs,对其求导即可得到卫星速度向量Vs;同理,近地高速目标在地心直角坐标系中的位置向量和速度向量分别表示为Rm和Vm。
则地心直角坐标系下卫星指向近地高速目标的相对位置和速度向量为
(9)
则多普勒频移为
(10)
式中:fs为载波频率;c为光速。
通信时延为
(11)
为完成星地链路双向辅助捕获,近地高速目标在接收时隙生成的本地信号为
Srec(t)=A(t)·Prec(t-td)·sin(2π(fs+fd)t)
(12)
式中:A(t)为信号振幅;Prec(t-td)为本地接收扩频码。
近地高速目标在发射时隙生成的信号为
Strans(t)=A(t)·Ptrans(t+td)·
sin(2π(fs-fd)t)
(13)
式中:Ptrans(t+td)为本地发射扩频码。
2 仿真验证
2.1 仿真模型
不失一般性,同时简化仿真模型,从中国卫星导航系统管理办公室测试评估研究中心下载北斗IGSO卫星历书数据,选取2021年8月9日的历书参数作为输入建立J2卫星模型,飞行航迹从中国西昌至印度洋,建立STK软件仿真场景[16],见图4。
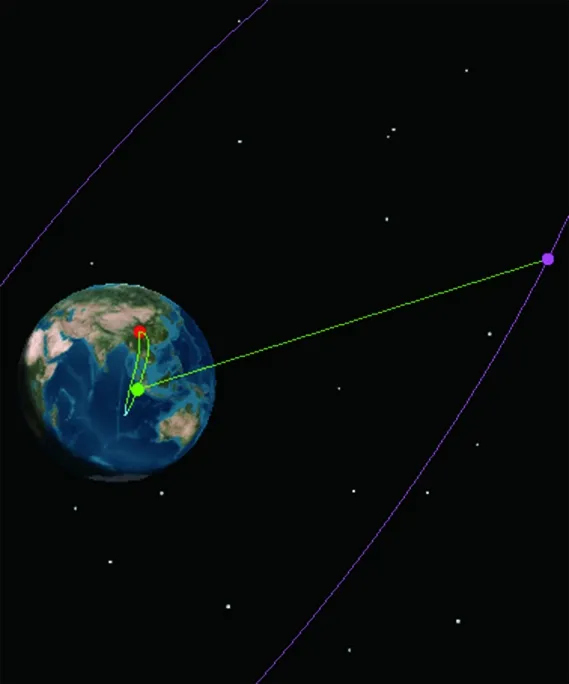
图4 仿真场景
2.2 验证结果
利用STK软件Connect模块进行STK软件与MATLAB软件的互联,获取STK软件仿真过程中的近地高速目标位置、姿态、发射点位置、大地方位角等数据,结合历书外推卫星位置,使用MATLAB软件运行第1.2节所述方法,计算波束指向方位角α和俯仰角β,与STK软件仿真得到的天线波束指向角进行对比;然后,分别将STK软件仿真与MATLAB软件计算获得的方位角和俯仰角数据相减,得到角度偏差[17-19]。图5为STK软件和MATLAB软件分别计算得到的结果,可见:在飞行全程中,STK软件和MATLAB软件得到的天线波束角基本一致,方位角和俯仰角偏差小于0.002°,远小于近地高速目标相控阵天线3 dB波束宽度(13°),方位角和俯仰角的趋势变化是由于近地高速目标姿态调整引起的。
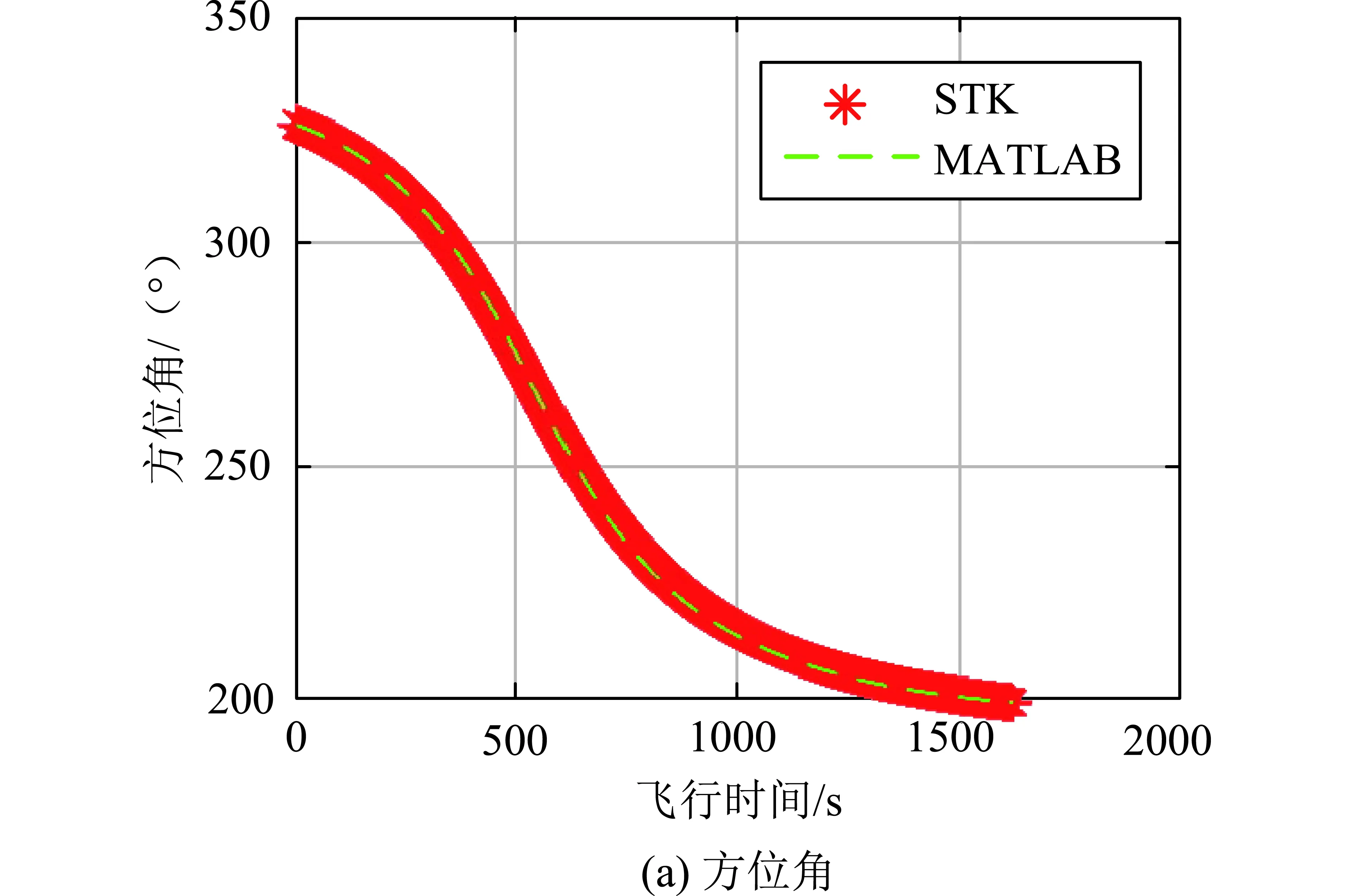
图5 方位角和俯仰角计算结果
使用MATLAB软件根据第1.3节所述方法计算相对距离和径向速度,与STK软件生成的距离和速度数据进行比对,分析计算误差。由图6可知:分别用STK软件和MATLAB软件计算的3轴向距离曲线比较吻合,星地距离误差为0.37~0.62 km,对应最大通信时延约2 μs。由图7可知:分别用STK软件和利用MATLAB软件计算的3轴向速度曲线比较吻合,速度误差小于0.8 m/s,对应最大多普勒频率误差约60 Hz。假设按10.23兆码片/秒的伪码速率和1 ms相干积分时间来计算,接收方只需搜索21个码片和1个频率间隔即可完成信号捕获,以现有技术水平在几十毫秒内即可完成信号捕获,可满足工程需求。
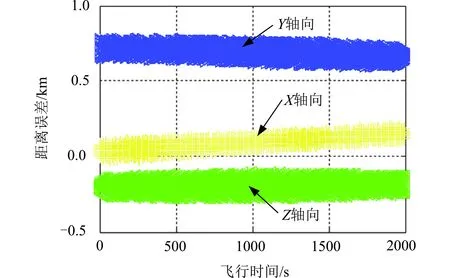
图6 卫星和近地高速目标的距离误差
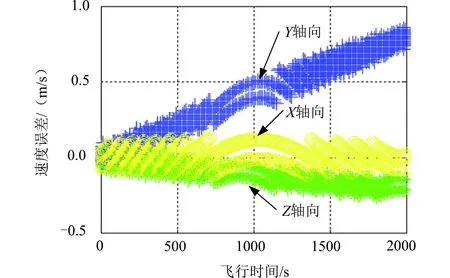
图7 卫星和近地高速目标的速度误差
3 结束语
针对近地高速目标和北斗星间链路系统建立通信链路时需要解决近地高速目标临时发生姿态和航迹变化导致卫星超出当前天线扫描范围后如何继续保持星地链路问题,以及卫星无法预知高速移动目标姿态变化信息时如何在极短时间内完成星地双向链路高动态信号的快速捕获问题,本文提出先根据高速近地目标天线扫描范围划分空域再进行双向辅助捕获的解决方法,介绍了切换天线波束的方法,可在近地高速目标姿态调整情况下保障星地链路的通畅。在星地时间同步的基础上,提出先波束对准再频率对准的方法进行双向辅助捕获,以快速建立星地链路。最后,开展联合仿真进行方法验证,结果表明:波束指向方位角和俯仰角最大误差均小于0.002°,通信时延误差小于2 μs,多普勒频率误差小于60 Hz,从而验证了近地高速目标接入北斗星间链路系统的技术可行性,可以满足工程需求。北斗导航系统可在全球范围内提供全天候、全天时的测控数传服务,未来基于北斗导航系统的天基测控应用需求会越来越多,本文针对具有灵活机动航迹不定特点的近地高速目标接入北斗星间链路系统的方法进行探讨,具有一定的工程应用价值。
