自动化集装箱码头远程驾驶控制系统设计*
2022-04-25王学谦
张 凯 王学谦 张 煜 尹 星
1天津港第二集装箱码头有限公司 天津 120000 2武汉理工大学交通与物流工程学院 武汉 430063 3武汉理工大学韶关研究院 韶关 512199
0 引言
随着“工业4.0”和“互联网+”进程不断深入,港口码头积极向数字化、全自动方向转型升级,自动化码头采用无人集卡作为水平运输设备,实现了作业无人化、能源绿色化的建设目标。
国内外一些学者针对自动化码头水平运输设备控制系统的设计进行了相关研究,魏昆[1]将所提出的AGV路径规划算法和动态调度方法与AGV控制系统相结合,实现了对小车的实时路径规划和远程作业调度;孙凌[2]对AGV远程控制系统进行了硬件设计和软件设计,使用PID控制器实现了AGV路径跟踪和控制;赵黎明[3]设计了基于单目视觉技术的导航系统软件,解决了港口AGV的自主定位、路径规划和避障检测等问题;冯亚丽等[4]提出了一种基于分布式云平台AGV远程监测控制系统,有效提高了AGV的导航效率和定位精度;Camilo Y L等[5]提出了一种AGV路线跟踪远程控制系统,减少了数据传输延迟时间,提高了AGV的定位精度;张艳珍等[6]设计了一套控制AGV运行路径的车载控制器,该控制器基于嵌入式系统,能实现车载控制器与上位机的通信。
由此可知,目前国内外对水平运输设备远程控制系统的设计侧重路径规划和作业调度,尚未形成一种一致的、全面的远程控制系统体系。本文结合自动化集装箱码头实际作业情况和5G技术,对自动化集装箱码头智能水平运输设备远程驾驶控制系统进行了设计,总结出了较为全面、智能的远程控制系统功能,为自动化码头无人驾驶控制系统设计提供参考。
1 系统整体架构设计
水平运输设备往返于码头前沿和堆场间进行装卸船作业,其行驶过程全程无人化,需要远程驾驶控制系统对水平运输设备进行实时监测和调控,确保无人集卡能实现精确定位与路径规划,顺利安全地完成作业任务。无人集卡远程驾驶控制系统是港口自动化集装箱码头信息建设的核心,其整体架构如图1所示。
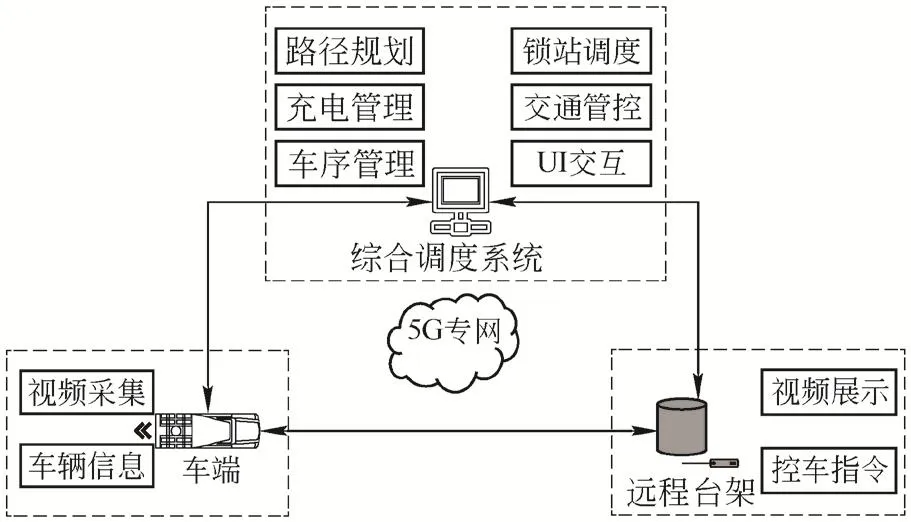
图1 系统整体架构
智能水平运输设备远程驾驶控制系统包含车端、远程台架、综合调度系统和5G SA专网网络4个部分。车端、远程台架和综合调度系统之间通过5G SA专网网络进行数据通信,实现对集卡车辆的动态实时控制。其中,集卡车辆是整个系统的服务对象,搭载的硬件设备包括5G智能网关、高清摄像头等,主要负责视频采集、传输以及控车等任务。综合调度系统是远程驾驶控制系统的核心部分,通过5G专网与系统中所有部分进行数据交互,其核心工作是对不同种类无人车的不同业务场景实现智能化的运营管理,在特定场景或自动驾驶出现异常时远程进行人工干预接管。远程台架端的硬件设备包括一体化台架、显示器、方向盘、挡位、油门制动装置等,主要负责台架控车指令下发和视频流展示。5G专网为车端和远程台架提供固定IP,在保障上传下行带宽的情况下,提供低时延的数据传输通道,为车端和远程台架提供点对点的数据通。
2 5G车载云控网关
5G车载云控网关包括通信功能模块、视频处理模块、车辆控制模块、高精度定位和安全防护功能等子模块。其构成如图2所示。
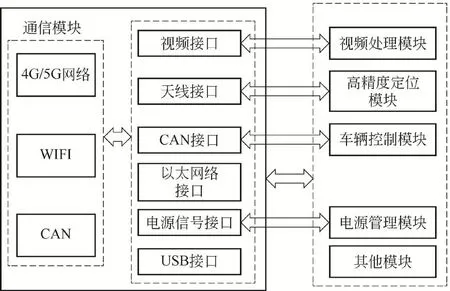
图2 5G车载云控网关
通信功能模块支持5G通信、4G通信、Wi-Fi通信和CAN通信,支持8路高清摄像头接口,支持4路5G天线接口和10/100/1 000 M自适应车轨级千兆以太网接口,至少支持2路CAN总线接口,至少支持1路USB2.0接口和2路串行接口。
视频处理模块可以实现视频编码功能,支持摄像头采集到的视频,编译成H.265或H.264的码流;可实现视频采集功能,支持采集8路720 P视频信号;可实现视频传输功能,支持RTP/RTSP标准或TCP私有协议。高精度定位模块和对应天线接口结合,向系统提供车辆行驶过程中的经度、纬度、航向角等定位信息。
车辆控制模块可实现车辆行驶控制,可通过CAN总线向车辆下发远程控制指令(前进、后退、加速、减速、转向、制动、驻车等),对车辆进行行车横纵向控制;可根据远程控制指令,通过CAN总线指令实现对车辆的电器(例如雨刷、空调,灯光等)的控制;可采集整车CAN总线信息;可支持在5G SA专网下高速低时延控车功能;支持定制的控车安全策略,能根据不同阈值实现车辆安全策略。
电源管理模块兼容支持乘用车与商用车车身供电,同时满足系统内的摄像头POE供电。同时,OTA升级模块具备在线升级功能。
3 一体化静态台架
一体化静态台架组成结构如图3所示。硬件包括一体化继承显示器、操控机构和控制计算器,支持LAN通信和Wi-Fi通信。软件部分包括远程驾驶操控软件和视频解码显示软件,远程驾驶操控软件能够对车辆控制指令进行下发,同时可实现对车辆电器的控制,例如雨刷、空调、灯光等。视频解码软件支持8路720 P、H.265或H.264的码流的解码和实时展示,同时支持基于RTP/RTSP或TCP私有协议解码和实时展示。
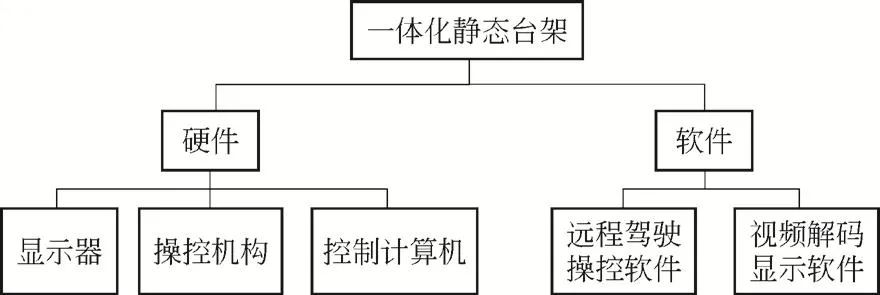
图3 台架构成
4 5G远程驾驶综合调度系统
5G远程驾驶综合调度系统支持台架和车辆一控一、一控多、多控多的应用场景,在终端侧、平台侧具备多协议适配能力,支持多种车型、多种泛智能终端的接入和指令下发;能对车辆的不同业务场景实现智能化的运营管理,提供车辆路径规划、智能充电管理、智能车序管理、动态锁站调度、智能交通管控和人性化的UI交互功能。
系统包含的功能模块如图4所示。综合调度系统各模块支持本地化部署,同时也支持嵌入原有系统。
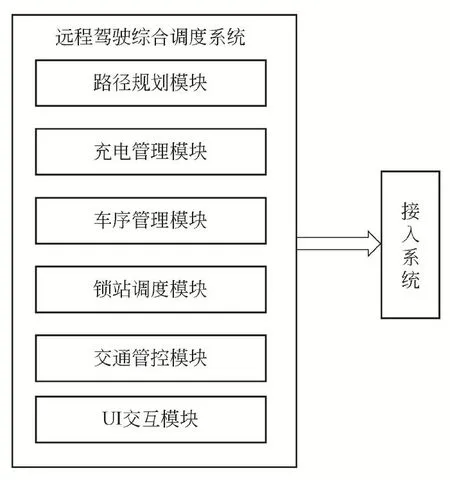
图4 5G远程驾驶综合调度系统
1)车辆路径规划模块基于动态高精度地图,结合动态路径规划算法,能实现车辆精确引导和驾驶协管控。
2)智能锁站管理模块支持动态锁站布置和车辆自适应路径规划,使用智能分配算法均衡锁站利用率。
3)充电管理模块采用阶梯充电策略,确保集卡车队连续作业,同时平衡车辆电量水平,降低车辆充电次数,保护电池寿命。
4)交通管控模块融合了车路协同技术,采取动态通行管控策略,并在车辆端集成导航APP,实现智能交通管控,确保内、外集卡安全通行。
5)车序管理模块对集卡实行差速控制,在行驶过程中根据码头实际情况动态调整车序,支持严格装船、灵活装船和自由装船模式。
6)UI界面能够实时显示集装箱门式起重机(以下简称场桥)、岸边集装箱起重机(以下简称岸桥)、集卡、锁站、充电桩、堆场等设备的空间位置和信息状态,同时能够支持异常情况处理,提高生产效率。
图5所示为5G远程驾驶综合调度系统的图形用户界面。从系统界面中可以看到岸桥区域、锁站区域、场桥区域、AGV区域和充电区域的现场实时信息。
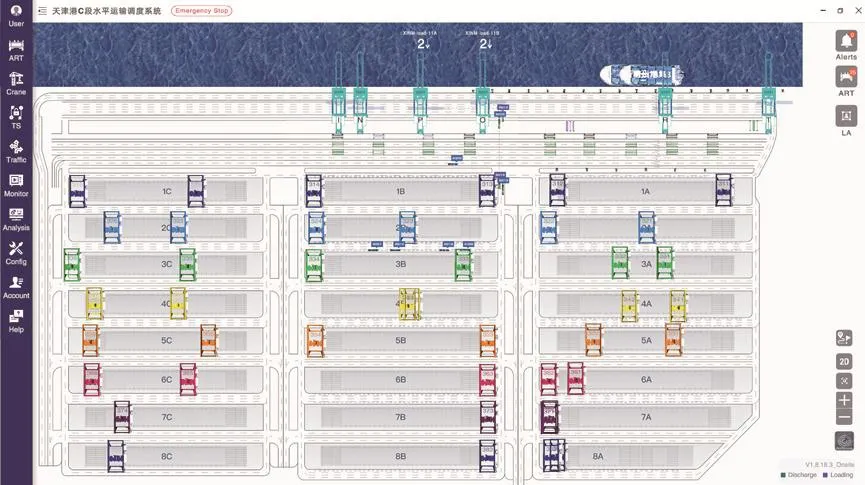
图5 远程驾驶综合调度系统界面
5 远程驾驶控制系统运行机制
自动化集装箱码头智能水平运输设备远程驾驶控制系统的执行流程如图6所示。
1)集卡车辆在行驶过程中通过搭载的高清摄像头采集周围环境视频信息,将视频信息通过5G车载云控网关进行编码并通过RTSP协议传输至台架,同时将车身电量、速度等信息通过5G网络上传给综合调度系统;
2)远程台架端对来自车端的视频信息解码之后进行视频流展示;同时接收综合调度系统的指令,然后对控车指令进行下发。
3)综合调度系统接收车辆速度、电量水平等信息,结合码头实际作业情况,使用内置智能算法生成车辆控制指令,同时将指令下发给台架端。
4)车端接收台架的控车指令,将台架控车指令转化为车身域控制器(或车身CAN总线)认可的实际控车指令下发至域控制器(或车身CAN总线),实现对车辆的实时调控。
6 总结
自动化集装箱码头智能水平运输设备远程驾驶控制系统包含车端、远程台架、综合调度系统和5G专网4个部分。车端主要负责视频采集、车辆信息传输和控车任务,远程台架主要进行控车指令下发和视频流展示,综合调度系统能够实现台架和车辆一控一、一控多、多控多的应用场景,能够对车辆的不同业务场景实现智能化的运营管理,车端、远程台架和综合调度系统之间通过5G SA专网网络进行数据通信,实现对集卡车辆的动态实时控制。该系统重在发挥5G的领先技术优势,实现5G SA网络下的视频回传和远程驾驶控制,助力港口自动化、智能化的产业发展。
