PID温度自整定控制系统及其实现
2022-04-25王培培
王培培
(施耐德电气(中国)有限公司上海浦东分公司,上海 200000)
0 引言
温度是工业对象中主要的被控参数之一,伴随着科学技术的不断发展,高精度的温度控制器具有极其广泛的应用前景[1]。高精度的温度控制器目前主要应用于低温实验仪器或者设备的制作,工业气体含水量的测定以及医疗、控制、电子器件等小环境领域。纯滞后现象普遍存在于温度控制系统中,这种情况下很容易引起系统超调和振荡以及系统参数变化,且这种不可准确预计的变化大大增加了高精度温度控制的难度[2]。传统的温度控制器更多地采用纯模拟电路作为驱动控制部分[3],但是设计模拟电路相对复杂,主要依靠经验数据来调节控制参数, 控制精度低,目前很难做到动态调节[4]。
PID自整定的方法很多,经验公式法很大程度上需要依靠个人的经验;曲线衰减法则需要对被控对象建立完善的数学模型;启发式推理技术需要专家系统和推理机制,而且计算量非常大[4]。在本系统中我们采用的是继电型自整定法来实现对温度参数的自整定功能[5]。由此设计的PID自整定的温度控制方法,具有控制温度精度高、范围广、速度响应快等优点。
1 PID自整定应用方法研究
1.1 方法概述
1.1.1 PID 自整定硬件电路设计概述
本设计基于DSPIC30F6014A单片机,主要由加热接口模块、加热防死机模块、PT100A/D转换模块、MCU PID自整定模块等组成。主要工作原理如下所述。
(1)采用PT100作为温度传感器,其输出信号为mV级。温度传感器的输出端通过全电桥连接至信号放大处理电路,信号放大处理电路的输出端连接至16位AD采样芯片,AD芯片采样2400个点并求平均值作为PT100的输出值,根据温度传感器的输出值与设定的温度值进行比较和控制。
(2)当MCU运行时会不断地向单稳态触发器发送串行控制数据控制加热棒正常工作,当MCU死机时则会停止发送控制数据,加热棒就会被切断控制停止工作。PID自整定结构图如图1所示。

图1 PID 自整定结构图
下面主要分两部分来论述一下硬件电路的设计。
(1)电源变换电路。该系统采用±12V工作电源,MCU及其外围数字电路的工作电压是3.3V,还需要提供2.5V参考电压,以及模拟电路中运放的负电源工作电压等。
本系统采用DC/DC电源变换模块,将±12V转换为±5V,该模块选用的是LM7805。再通过TPS77633将5V转换为3.3V,通过UCC284将-5V转换为-3.3V,主要给MCU及外围数字电路供电以及模拟电路中运放的负电源工作电压。2.5V参考电压电路,选用的芯片为ADR219。
(2)基于DSPIC30F6014A的数字电路。基于单片机的外围数字电路主要有:加热接口模块、加热防死机模块和PT100 A/D转换模块。
①加热接口模块。该模块采用固态继电器和光耦,通过加热信号HEAT_OUT来控制固态继电器的通断,从而控制加热棒的加热时间。如图2所示为加热模块的电路图。加热信号又是通过光耦器件来驱动固态继电器的通断。
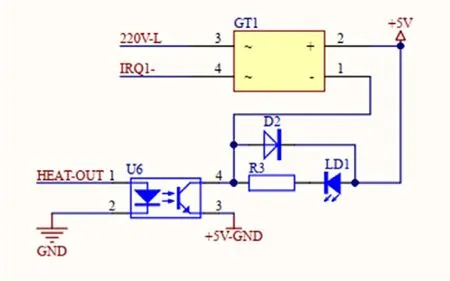
图2 加热模块电路
②加热防死机模块。当MCU运行时会不断地向单稳态触发器发送串行控制数据控制加热棒正常工作,当MCU死机时则会停止发送控制数据,加热棒就会被切断控制停止工作。
③PT100A/D转换模块。采用PT100作为温度传感器,量程为0~400℃,其输出信号为mV级。温度传感器的输出端通过全电桥连接至信号放大处理电路,采用低功率、高精密放大器差分放大的方式进行信号处理,选用的放大芯片为INA118。原理图如图3所示。

图3 PT100 信号放大处理电路
信号放大处理电路的输出端连接至16位AD采样芯片,AD芯片采样2400个点并求平均值作为PT100的输出值,根据温度传感器的输出值与设定的温度值进行比较和控制。温度传感器测得保温箱内的环境温度通过SPI通讯与MCU进行数据传输,并且每1s发送测量的温度值给上位机进行显示。本模块选用的AD芯片为AD7694,图4所示为AD7694的电路连接图。

图4 AD7694 的电路连接图
2 PID算法简介
PID中P是比例,是测量值与设定的定值之间的偏差乘以一个系数;I是积分,是对测量值与设定的定值之间的偏差进行积分运算;D是微分,对测量值与设定的定值之间的偏差进行微分运算。在工程应用中,最为广泛的调节控制分为比例控制、积分控制和微分控制,简称PID控制。实际中也有PI和PD控制。PID控制器就是根据测量值与设定的定值之间的误差,利用比例P、积分I、微分D计算出控制量进行控制。PID控制具有结构简单,工作可靠,稳定性良好和调整方便等优点从而成为现代工业控制的主要技术之一,如图5。

图5 PID 控制原理框图
以下是PID参数的原则要求和整定方法。(1)原则要求:被控过程相对稳定,能迅速并准确地跟踪设定值的变化,测量值与设定值之间的超调量小。在环境参数与系统发生变化时,控制应保持稳定。显然,要同时满足上述各项要求是困难的,可以根据具体的需求,满足主要需求,并兼顾其它方面。(2)PID参数整定方法:理论计算法需要建立被控对象完善的数学模型;工程整定法和理论计算法完全不同,需要在现场对控制系统进行整定。
3 PID自整定控制算法
根据K.J.Astrom 提出的继电振荡法,通过描述函数法,经过推导,在自整定模式下,产生振荡的条件为:


表1 Z-N PID 参数整定表
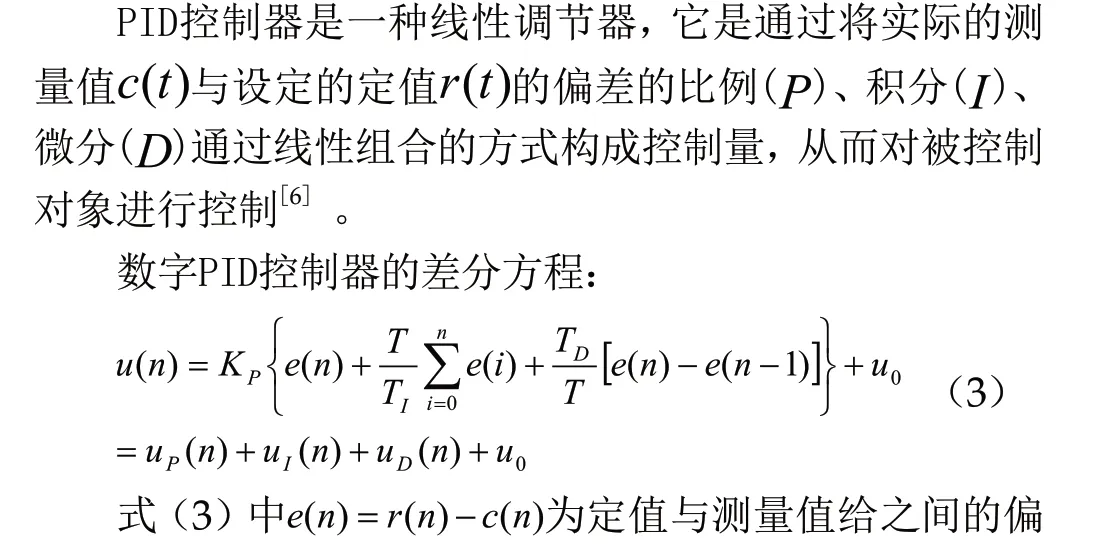
4 数字PID控制器及算法

这里用heat_time来表示加热功率,heat_timel=4000表示满功率加热,heat_timel=0表示零功率加热,0 本系统使用上述的硬件电路以及所述的增量型PID控制算法,通过完整的系统测试,该温度控制系统经过PID自整定算法控制加热棒工作,能够在30分钟内使保温箱内的温度保持在设定的温度值80℃±0.1℃范围内,达到了技术指标要求的温度精度以及稳定度,超调量也能满足指标要求。除此之外,还可以通过上层软件随时修改PID的控制参数,实现方法简单、控制效果良好。
5 结论
