基于LoRa的煤矿井下人员定位系统设计
2022-04-25仲会娟刘旭
仲会娟 刘旭


【摘 要】 由于煤矿井下环境条件复杂多变,在对其进行监测时会产生大量数据,再加上存在网络延时与定位算法精度低的问题,为此设计了基于LoRa的煤矿井下人员定位系统。在定位问题上,对迭代质心和RSSI测距进行优化改进,首先通过给定阈值对节点种类进行识别判断,之后在进行迭代计算时,通过分配权值系数来缩减偏差,从而缓解因权重分配不均匀而导致定位精度低的问题。经仿真测试与比较分析,该算法易于计算、定位精度较高、定位误差较小,可以更好地用于煤矿井下人员定位。系统通信测试结果表明,网络通信能力好,延时性低。
【关键词】 LoRa通信;RSSI测距算法;迭代质心算法;人员定位
Design of Underground Personnel Positioning System Based on LoRa
Zhong Huijuan1 , Liu Xu2*
(1. Hebei Institute of Engineering and Technology, Shijiazhuang 050000, China;
2. Anhui University of Science and Technology, Huainan 232001, China)
【Abstract】 Due to the complex and changeable environmental conditions in the coal mine, a large amount of data will be generated when monitoring it. In addition, there are problems of network delay and low accuracy of positioning algorithm. Therefore, a coal mine underground personnel positioning system based on Lora is designed. For the positioning problem, the iterative centroid and RSSI ranging are optimized and improved. Firstly, the node types are identified and judged by a given threshold. Then, in the iterative calculation, the deviation is reduced by assigning weight coefficients, so as to alleviate the problem of low positioning accuracy caused by uneven weight distribution. Through simulation test and comparative analysis, the algorithm is easy to calculate, has high positioning accuracy and small positioning error, and can be better used for underground positioning in coal mine. At the same time, the communication test of the system is carried out. The results show that the network communication ability is very good and the delay is very low.
【Key words】 Lora communication; RSSI ranging algorithm; iterative centroid algorithm; personnel positioning
〔中图分类号〕 TD76 〔文献标识码〕 A 〔文章编号〕 1674 - 3229(2022)01- 0020 - 04
0 引言
我国的煤矿大多属于井工煤矿,处于地下几百米的巷道地形复杂、空间狭小、环境多变,恶劣的空间环境对网络通信及实时定位造成了极大干扰。通过井下实时通信与定位可以随时监测井下作业人员位置信息,更能在事故发生时精确营救。采用已有的定位算法,监测结果位置信息偏差太大、精度太低,对煤矿的安全生产尤为不利。
对于煤矿井下定位算法,杨震、蒋锐提出了以质心迭代为基础的算法定位,减小了通过RSSI测距定位引起的偏差[1]。郭蓝天、李虎俊等对于二次质心进行改进,先利用三边测量得出大致的质心坐标,然后再进行精确定位,大大减小了定位误差[2]。陈曙、朱博等设计出了质心加权定位算法,通过对加权之后的坐标加以校对,使累计偏差有所降低[3]。
1 系统总体设计
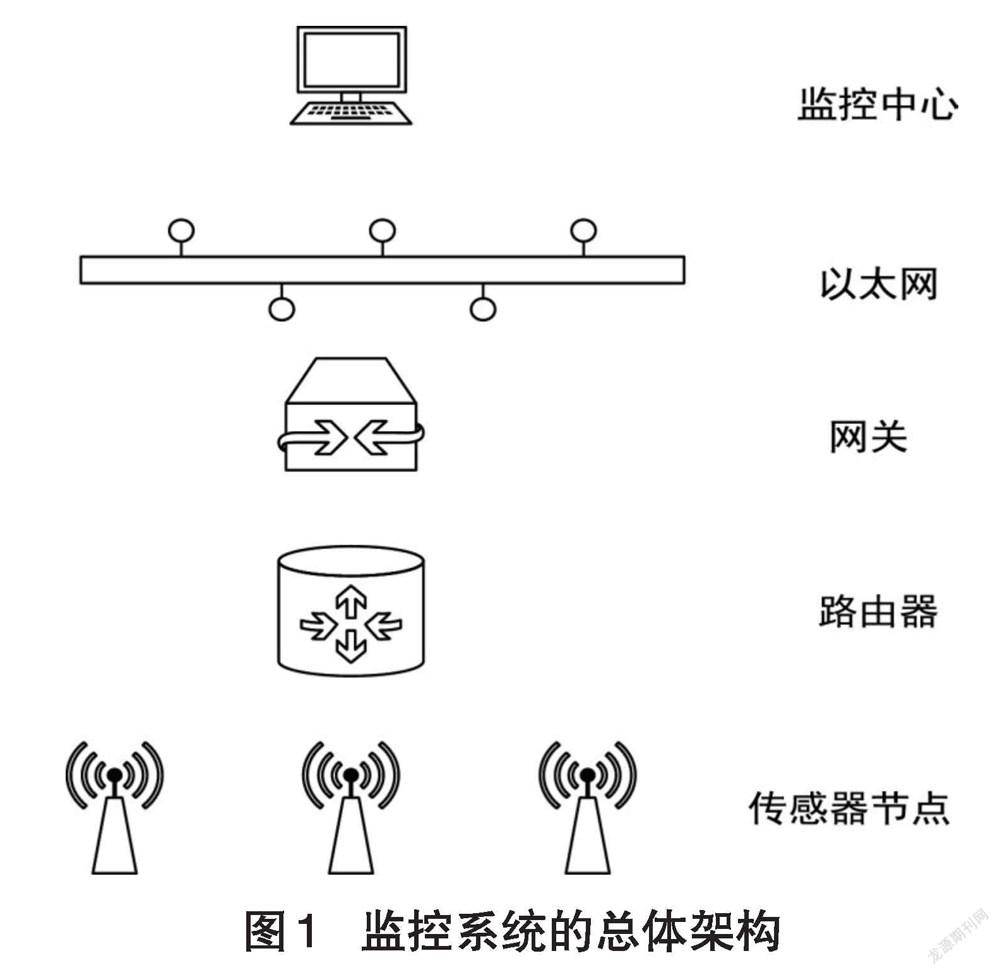
本系统主要由传感器模块、数据传输模块、监控中心构成。其中传感器模块由控制器、心率、血氧传感器、气体传感器构成,控制器以CC2530作为控制中心,传感器用来采集人体信号,数据传输模块由路由器、LoRa网关、以太网组成,用来把接收到的状态信息及位置数据上传至监控中心。监控中心用来记录分析所上传的数据,为判断提供数据来源。监控系統的整体架构如图1所示。
1.1 节点硬件设计
节点用于采集煤矿井下的环境信息,并对相关信息进行初步筛选。节点由嵌入式微处理器、传感器模块、电源模块、LoRa无线通信模块、报警模块、交互模块构成[4]。微处理器作为主控芯片,用于对节点的各部分电路进行控制,同时对采集的数据进行分析存储。电源模块负责为节点的各部分电路提供合适的电压和电流。传感器模块用于采集周围环境及相应位置数据。报警模块用于事故紧急报警。LoRa模块主要用于系统传输与维持通信。节点结构框图如图2所示。
1.2 节点传输软件设计
节点的工作流程为设备上电进行初始化,然后传感器节点接收并检测环境数据,将数据传入处理器中进行数据预处理,对相关数据进行模数转换,之后再将检测到的数据与标准值、异常值和超限阈值进行比较[5],看数据是否安全,若安全,继续进行数据采集,否则进一步把采集到的数据分别与异常值和超限阈值进行比较,将得到结果按优先级进行处理,打包待发。节点传输流程图如图3所示。
2 改进定位算法
传统的RSSI的定位过程如图4所示。首先对其周围RSSI值按照数值大小进行排列,然后取其中最小的四个节点作为多边形,经几何计算可得出其质心位置坐标,但如果环境中参考节点位置坐标没有均匀分布,那么经过计算得到的未知节点位置坐标就会与真实位置差距很大,这样就会产生很大的定位误差[6]。
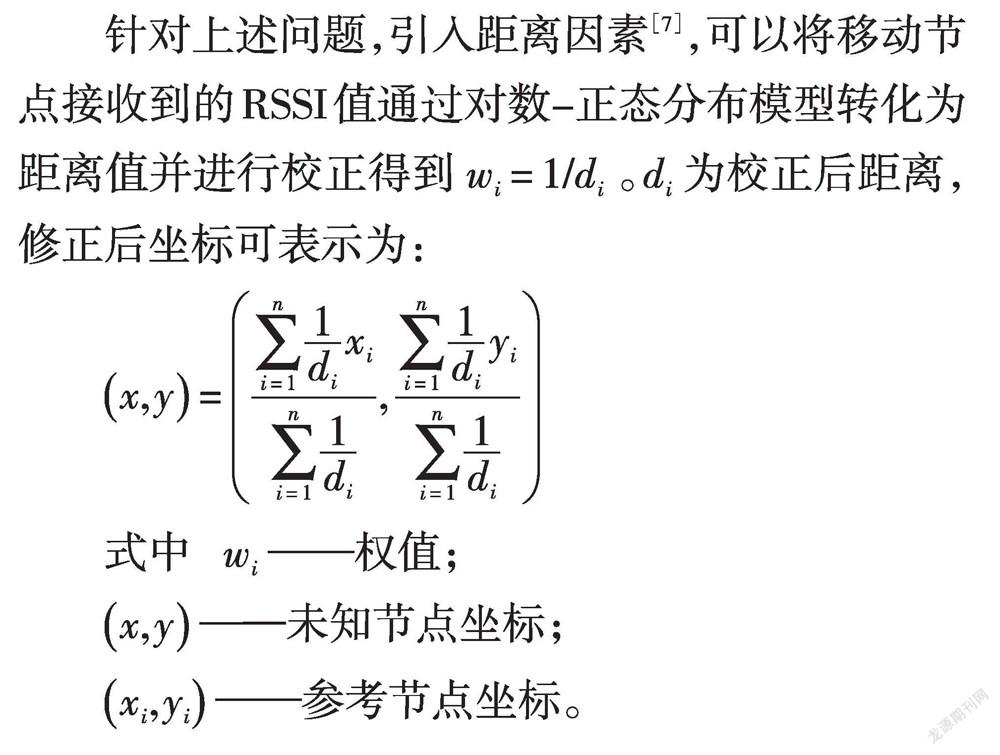
针对上述问题,引入距离因素[7],可以将移动节点接收到的RSSI值通过对数-正态分布模型转化为距离值并进行校正得到[wi=1/di 。][di]为校正后距离,修正后坐标可表示为:
[x,y=i=1n1dixii=1n1di,i=1n1diyii=1n1di]
式中 [wi]——权值;
[x,y]——未知节点坐标;
[xi,yi]——参考节点坐标。
当通信网络范围内参考节点数量较少达不到节点平均覆盖率时,某些参考节点就不能参与移动节点定位。假设在某一个区域中,参考节点太少,就需要让已经实现定位的移动节点参与进来。与此同时,通过设定阈值来识别判断需要保留的参考节点,这种做法可以缓解因权重分配不均匀而导致定位精度低的问题,但会产生误差。下面对累计误差进行修正。
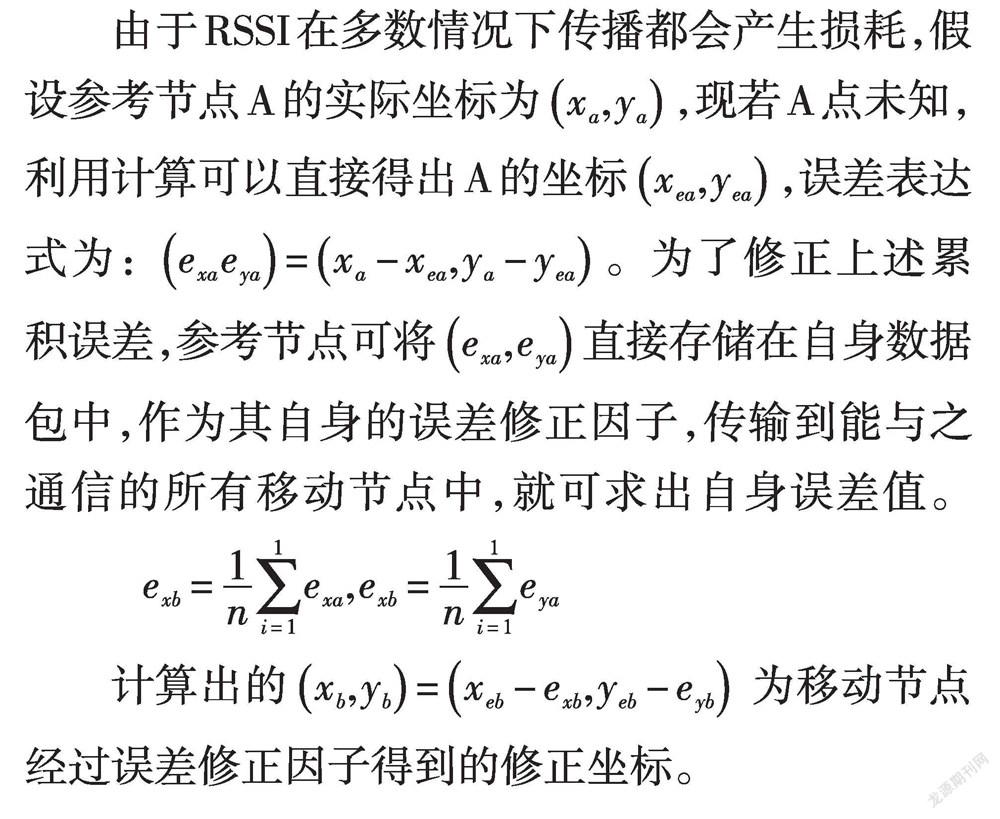
由于RSSI在多数情况下传播都会产生损耗,假设参考节点A的实际坐标为[xa,ya],现若A点未知,利用计算可以直接得出A的坐标[xea,yea],误差表达式为: [exaeya=xa-xea,ya-yea]。为了修正上述累积误差,参考节点可将[exa,eya]直接存储在自身数据包中,作为其自身的误差修正因子,传输到能与之通信的所有移动节点中,就可求出自身误差值。 [exb=1ni=11exa,exb=1ni=11eya]
计算出的[xb,yb=xeb-exb,yeb-eyb] 为移动节点经过误差修正因子得到的修正坐标。
3 测试与分析
3.1 环境搭建
由于测试环境的有限,无法搭建一个实际的煤矿井下平台,为了更好地验证上述煤矿井下人员定位算法的合理性和准确性,使用MATLAB进行模拟环境平台搭建并进行仿真测试。通过模拟建立一个100m×100m二维方形区域,信标节点和未知节点都通过随机函数生成,随机分布在正方形区域,相关参数都根据矿井巷道环境进行设置。整个区域分布着50个路由终端,并且根据仿真需要提供几组坐标作为人员位置进行仿真,测试算法的准确性。依据工作条件,把无线载波信号的工作频率调整为24GHz,通讯半径调整为30m。
3.2 煤矿井下人员定位算法仿真分析
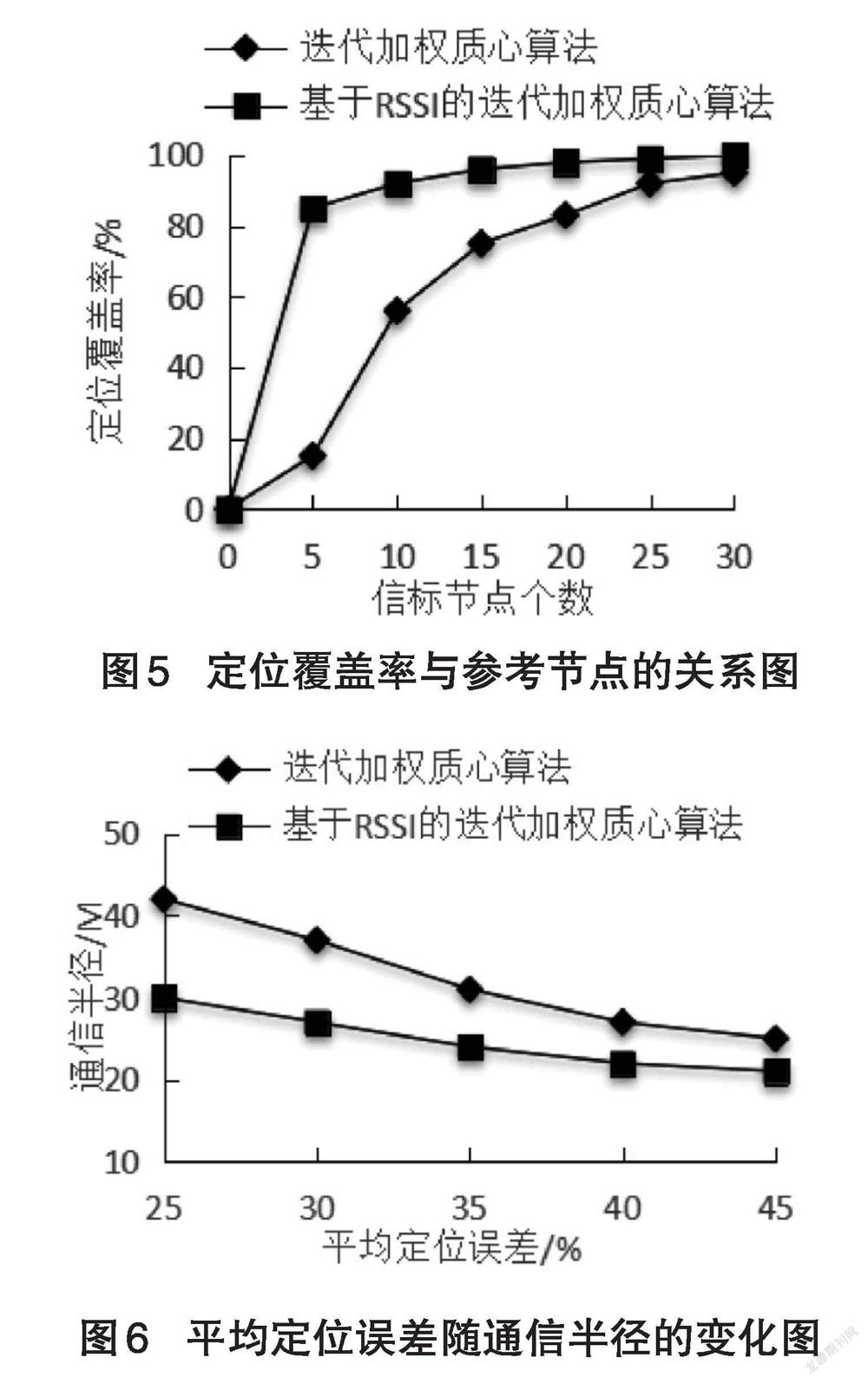
由图5可以发现,当网络覆盖区域内参考节点数较少时,本文算法的定位覆盖率能达到80%以上,即能实现绝大多数节点的定位。在参考节点数不大于20的情况下,本文算法覆盖率明显较大;在参考节点数大于30的情况下,两种算法的覆盖率均高于90%;最重要的是,在参考节点数等于20时,本文算法基本上可以实现全区域覆盖。
由图6经对比分析可知,在相同通信范围内,改进算法的定位误差明显低于迭代加权质心算法。改进算法不管在定位精度还是在定位误差上均优于迭代加权质心算法。
3.3 节点网络通信测试
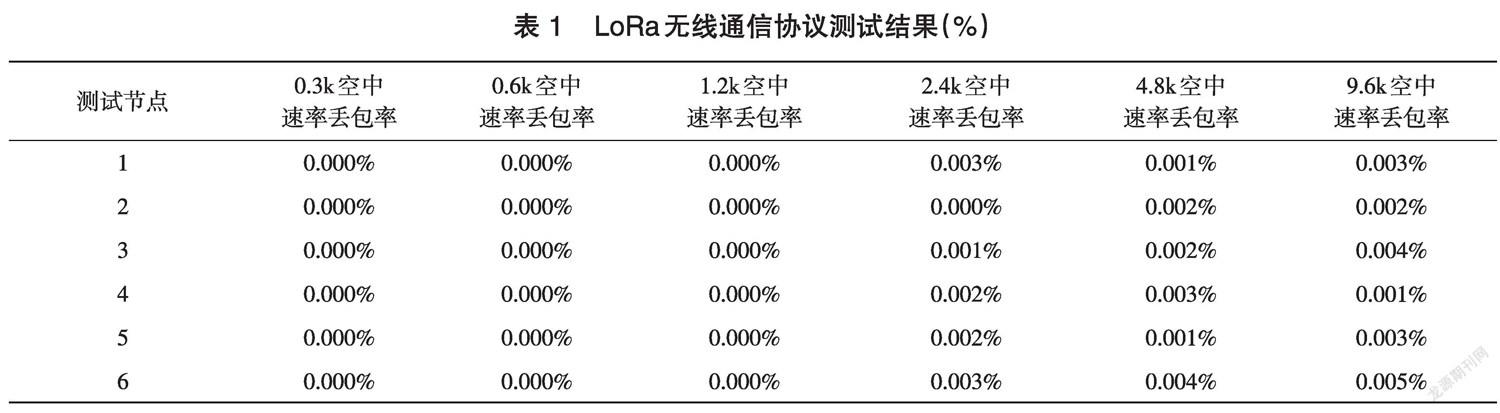
节点之间的数据交换依赖于以太网的通信协议,在LoRa无线通信协议测试中,测试入网成功率以及丢包率的做法为:使6个模拟设备通过测试程序不断地入网、离网以及发送数据包。测试时模拟设备向汇聚节点发送单包长为256字节的数据包,分别测试空中速率为0.3k、0.6k、1.2k、2.4k、4.8k、9.6k时的每10万个数据包的丢包率。测试结果如表1所示。
从测试结果来看,当空中速率为0.3k、0.6k、1.2k时,丢包率为0,随着速率的不断增大,丢包率明显变大。总体来看,丢包率较低,系统有较强的通信能力。
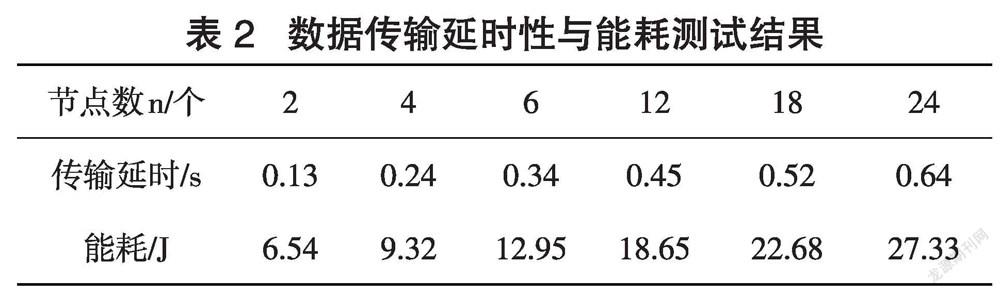
3.4 LoRa模块数据传输能耗及延时性测试
在本系统中,使用LoRa无线通信模块,所以就得考虑数据的延时性。对于节点,采用多对一通信测试,集中节点接收其他节点发送的数据帧,统计计算每组数据帧发送与接收的时间,得出延时差,最后计算所有帧的平均传输延时。工作在不同LoRa节点数下,数据传输延时及能耗测试情况统计结果如表2所示。测试表明数据的传输时延与节点数n呈正比,该系统平均能耗为15.6J,延时为0.36s,表明系统在正常工作时能耗低、延时小。
4 结语
本文提出了一种基于LoRa的煤矿井下人员定位系统设计,并对系统进行了通信传输能力测試,结果表明网络通信能力好、延时性低、可靠性高。对改进算法进行了定位精度和误差测试,最后经仿真测试比较可知,该算法定位误差较小、定位精度较高,不管在定位精度还是在定位误差上均优于迭代加权质心算法,可以更好地用于煤矿井下人员的定位。
[参考文献]
[1] 李腾宇. 基于RSSI加权质心和GASA优化的WSN定位算法研究[D].杭州:浙江农林大学,2015.
[2] 朱明辉. 基于RSSI的煤矿井下人员定位算法研究[D].唐山:华北理工大学,2016.
[3] 谢桦. 基于RSSI的无线传感器网络加权质心定位算法[D].南昌:江西理工大学,2017.
[4] 王丽娜. 基于Wi-Fi的煤矿井下人员定位技术研究[D].洛阳:河南理工大学,2015.
[5] 张颖惠. 煤矿井下爆破安全监控系统的设计[D].哈尔滨:哈尔滨理工大学,2016.
[6] 胡冰. 无线传感器网络节点定位与目标跟踪技术研究[D].武汉:武汉理工大学,2010.
[7] 姚维照. 无线传感器网络节点定位算法研究及改进[D].太原:太原理工大学,2012.
