电动汽车驱动防滑控制系统设计
2022-04-22王志伟王成尧
高 峰, 王志伟, 王成尧, 王 涛
(安徽安凯汽车股份有限公司, 合肥 230051)
汽车在光滑路面起步、加速时,容易出现驱动轮打滑现象。打滑时,滑转率过大会导致汽车驱动力和侧向力减小,从而使得汽车的方向稳定性、转向控制性降低,影响行车安全。另外,驱动轮打滑还会导致其转速急速增大,加剧轮胎磨损。
1 驱动防滑系统结构设计
目前,常用驱动防滑系统的原理为:以驱动轮和从动轮的角速度来计算驱动轮的滑转率,再通过降矩、制动等方式将滑转率控制在最优区间。但是,对于一些无从动轮的全驱汽车,此方法并不适用。
为了解决此问题,本文设计的电动汽车驱动防滑系统结构如图1所示。驱动电机与对应的驱动轮之间以减速器相连接;加速踏板、整车控制器、驱动电机、转速传感器之间通过CAN线连接通讯。由汽车理论可知,汽车在良好的硬路面上行驶时的受力情况分析如下:
==,-=
式中:为地面对驱动轮的反作用力;为形成的力矩;为驱动轮所受垂直载荷;为附着系数;为车轴对驱动轮的驱动转矩;为驱动轮的转动惯量;为驱动轮的角加速度。

图1 驱动防滑系统结构
地面对驱动轮的反作用力,既是驱动汽车前进的驱动力,也是驱动轮转动的阻力。由汽车理论可知:不同条件下道路的附着系数和滑转率的关系是不同的。当滑转率过大或车辆处于湿滑路面时,地面对驱动轮的附着系数变小,也随着变小,从而使得车辆的加速性能变差,同时驱动轮的角加速度也会变大。因此,本文设计的电动汽车驱动防滑系统通过驱动轮的角加速度变化来判断车轮是否打滑或处于湿滑路面,是否需要降低驱动电机输出扭矩,以达到驱动防滑的目标。
2 驱动防滑系统控制策略
该驱动防滑系统控制策略如图2所示。
1) 通过加速踏板采集驾驶员输入的电机扭矩请求命令信号,通过驱动轮上的转速传感器采集驱动轮的角速度信号,并将其发送给整车控制器。
2) 计算驱动轮角加速度=(-),其中为上周期采集的驱动轮角速度,初始值为0;为整车控制器采集驱动轮角速度的周期。每次计算后,再将当前的值赋于变量,用于下个周期值的计算。
3) 比较变量与设定值的大小,如果>为真,则认为驱动轮处于打滑状态,执行步骤4);否则认为驱动轮处于未打滑状态,执行步骤5)。
4) 整车控制器在上周期发送的电机扭矩请求命令的基础上,发送电机扭矩降低的命令。为保证车辆行驶的平顺性,设定一个扭矩变化限值,在单位时间内降低的电机扭矩不得大于此限值。
5) 整车控制器执行驾驶员命令,发送加速踏板采集的电机扭矩请求命令。
6) 驱动电机执行整车控制器发送的电机扭矩需求命令,驱动车轮转动。
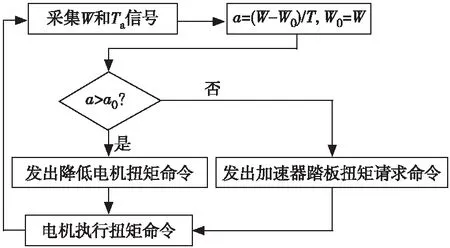
图2 驱动防滑系统控制策略
3 实车验证
为了验证驱动防滑系统的效果,进行实车滑转试验。整车控制器采用Freescale MPC5534芯片,使用C语言在Freescale CodeWarrior软件中对该驱动防滑系统控制策略进行编程。
试验样车从干燥水泥路面上全加速踏板加速起步,行驶一段距离后进入湿滑路面。测试结果如图3和图4所示。
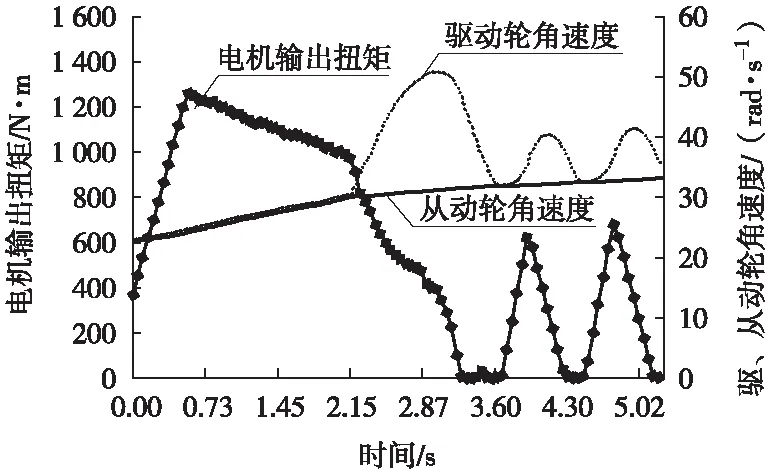
图3 电机输出扭矩与驱、从动轮角速度
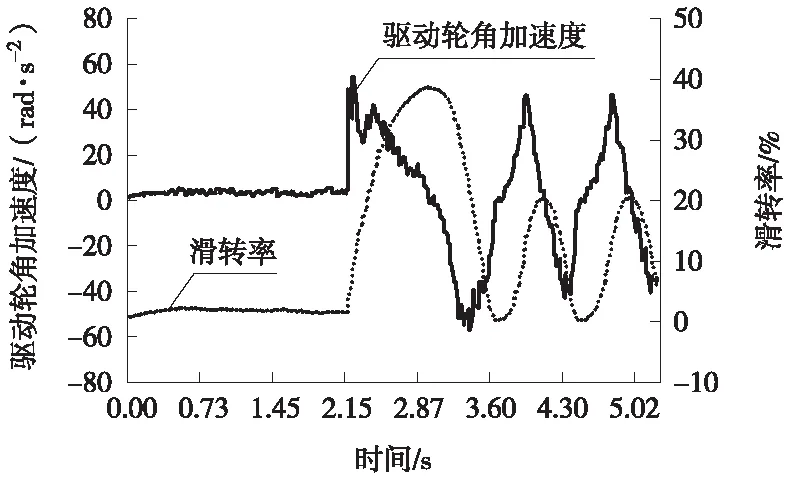
图4 驱动轮角加速度与滑转率
可以看出:0~2.17 s车辆在干燥水泥路面上全加速踏板加速,驱动轮未打滑,驱动轮滑转率稳定在2%左右,其角加速度在1~5 rad/s之间波动,即使在电机接近峰值扭矩时,驱动轮的滑转率和角加速度也没有明显提高;在2.17 s之后车辆进入雨水路面,驱动轮开始出现打滑现象,驱动轮滑转率也随之增大,其角加速度也大幅增加,在2.23 s时达到54.45 rad/s,大于设定值,此时驱动防滑系统开始工作,整车控制器开始降低电机扭矩。为保证车辆的平顺性,限制了降矩的幅度,所以驱动轮滑转率依然保持上升状态,直至40%左右才开始降低,之后驱动轮的滑转率保持在0~22%之间,车辆行驶基本平稳,达到设计的预期目标。
4 结束语
本文设计了一种电动汽车驱动防滑系统,并进行了实车验证。此系统无需直接计算滑转率,适用于各种驱动方式的电动汽车,并且无需识别当前路面最佳滑转率,对各种道路、天气的适用性较强。