小行星撞击防御演示验证任务设计及关键技术分析
2022-04-21顾征韩承志黄翔宇张熇
顾征, 韩承志, 黄翔宇, 张熇*
(1. 北京空间飞行器总体设计部, 北京 100094; 2. 北京控制工程研究所, 北京 100094)
1 引言
近地小行星、 彗星等是太阳系形成和早期演化过程中的“化石”, 相关特性可以反映太阳系早期物质状态和形成过程, 具有极高的科学价值, 但同时也存在撞击地球给生态环境带来极大破坏的风险。 因此其作为天文学及行星科学重点研究对象的同时, 也是人类文明发展的潜在威胁。 目前开展编目的近地小行星约2.8 万颗, 约占总量的1%, 直径超过140m 以上的占比近一半, 平均每2 万年光顾地球一次, 与地球生命的存亡息息相关。 考虑到未编目的近地小行星数量更为庞大, 其潜在撞击风险远大于目前已掌握情况。 面对小行星撞击风险, 学者提出了多种消除或降低风险的策略: 包括动能撞击、 核爆等的短时作用手段, 以及引力牵引、 激光烧蚀驱动、 附着推离、 太阳光压、 质量驱动、 离子束推离等长期作用手段[1—4]。 从表1 分析可见在诸多技术途径中, 动能撞击成熟性高、 技术简单、 灵活性强、 效果明显, 是当前在轨处置技术的首选方案。

表1 不同类型防御手段比较分析Table 1 Comparative analysis of different types of defense means
2 国际研究情况
20 世纪90 年代开始, 美欧等国开始研究小行星防御, 并开展“近地天体观测计划”、 “双小行星重定向测试” (DART) 任务等。 2018 年特朗普签发《国家近地天体应对战略及行动计划》,明确在十年内发展近地小行星偏转和摧毁技术等任务。 欧洲依托“地平线2020” 资助, 提出了近地天体防护盾任务概念, 该任务计划对小行星实施撞击, 并计划通过测量小行星受撞击前后的轨道变化来评估撞击的效能; 美国爱荷华州立大学小行星偏转研究中心提出了“编队动能撞击” 和“核爆+动能撞击” 的拦截器设计概念任务; 美国劳伦斯利弗莫尔国家实验室提出了多级动能撞击概念任务。 在这些任务中付诸工程实践的, 只有DART 任务。 此外美 国 实施的 “深 度撞击”(Deep Impact) 科学探测任务实现了动能撞击防御的相关技术验证。
2.1 “双小行星重定向测试” (DART) 任务
DART 是国际上首次以行星防御为目标的试验任务, 是美欧合作的“小行星撞击与偏移评估” (AIDA) 计划的一部分, 通过动能撞击改变小行星运行轨道, 以建立撞击防御能力, 并以此评估动能撞击的防御效果, 任务概念如图1 所示。

图1 DART 任务概念图Fig.1 DART mission concept
(1) 任务设计
直接撞击小行星对其环绕太阳轨道的即时影响非常小, 难以观测。 因此DART 选择撞击双小行星系统中的较小天体, 借助光变周期变化开展撞击效果研究。 DART 任务选择的最终目标为“迪蒂莫斯” 双小行星系统, “迪蒂莫斯”-A(Didymos A) 直径约780m, “迪蒂莫斯” -B (也被称为Dimorphos 或moonlet) 直径约160m。 “迪蒂莫斯”-B 环绕“迪蒂莫斯”-A 运行, 两者相距约1km。
DART 探测器以6.6km/s 的速度撞击“迪蒂莫斯” 系统中较小的“迪蒂莫斯”-B, 使双小行星轨道周期至少变化约73s, 为实现高质量的地基观测并开展评估, 撞击选择在“迪蒂莫斯”-B距离地球约1.1×107km 时进行, 口径低至1m 的地基望远镜均可获得观测数据。
DART 任务于2021 年11 月24 日搭乘“猎鹰”-9 火箭从范登堡空军基地发射。 2022 年9 月抵达距离地球1.1×107km 的“迪蒂莫斯” 小行星系统并撞击。 轨道设计参数见表2, 为满足DART与小行星交会时光学导航图像效果, 交会相位角(太阳-目标-探测器的夹角) 不超过60°, 同时探测器相对小行星速度方向与Didymos 双星系统相互绕转轨道平面夹角不超过30°。

表2 DART 任务轨道设计参数Table 2 Orbit design parameters for DART
(2) 探测器方案
DART 探测器发射时总质量约610kg, 撞击时总质量约为550kg。 主要结构为1.2m×1.3m×1.3m的立方体, 如图2 所示。 探测器携带一颗意大利航天局(ASI) 研制的立方星(LICIA), 以掠飞拍摄撞击过程[5]。
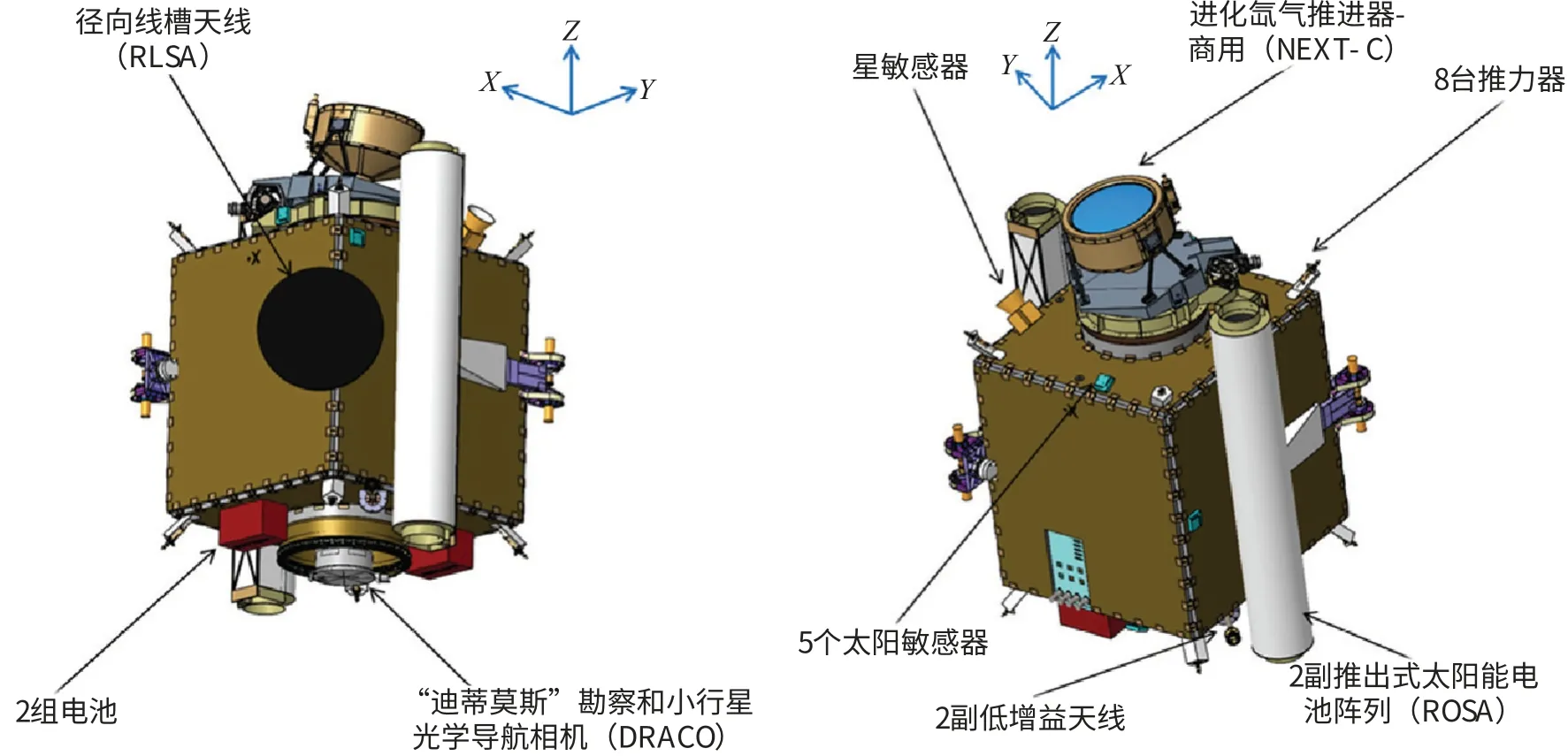
图2 DART 探测器构型图Fig.2 Detector configuration of DART
探测器配置一台光学导航相机(DRACO),采用208mm 孔径的Ritchey-Chretien 望远镜, 焦距12.6mm, 视场角0.29°×0.29°, 分辨率为0.5 弧秒/像素, 在撞击前17s 预计分辨率可达到0.5m/像素。
探测器配置2 副卷式太阳电池阵(ROSA)为其电推进系统提供能源。 通信系统采用X 频段, 配置2 个半球状低增益天线和1 个用于高增益通信的新型 “径向线槽天线” (RLSA), 以3Mbit/s 的速度将图像传回地球。 探测器配置8 台推力0.9N 的化学推力器, 携带50kg 联氨推进剂用于航天器轨道机动和姿态控制, 并配置1 台商业离子推进器(NEXT-C), 携带60kg 氙气用于轨道转移[6,7]。
(3) 撞击观测
北京时间2022 年9 月27 日7 点14 分, DART任务探测器准确撞击了“迪蒂莫斯” -B 小行星,其释放的立方星掠飞拍摄撞击过程影像见图 3,由于飞行速度较快成像效果有限, 难以开展撞击前后小行星地形地貌的变化分析。 “詹姆斯·韦伯” “哈勃” 等太空望远镜, “露西” 小行星探测器和全球30 余台地面望远镜对撞击过程的监测显示, 撞击产生了大量溅射物, 双星系统的亮度瞬间增加10 倍以上, 表明撞击试验取得成功(见图 4), 后续“哈勃” 等望远镜将对撞击后双小行星绕转周期改变量进行持续监测和评估。

图3 立方星飞掠过程中拍摄的撞击图像Fig.3 An image of the impact during the Cubesat flyby
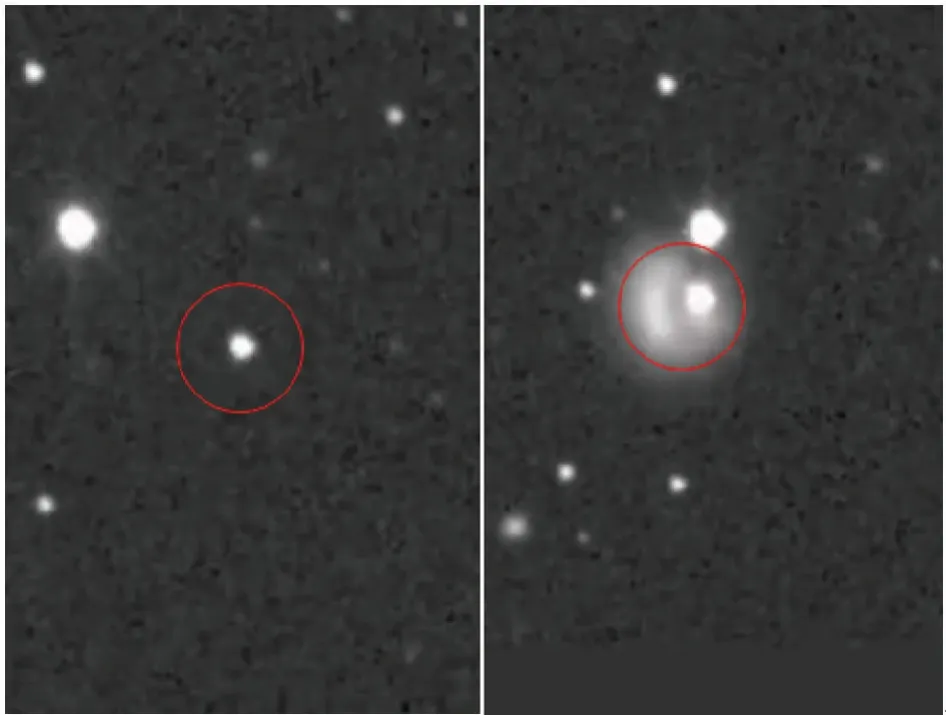
图4 撞击前(左) 和撞击后(右) 地面观测图像Fig.4 Ground observations before (left)and after (right) impact
在DART 撞击之前, 子星“迪蒂莫斯” -B 围绕主星 “迪蒂莫斯” -A 运行一圈的时间为11h55min。 根据观测数据分析, 撞击后“迪蒂莫斯”-B 围绕 “迪蒂莫斯”-A 轨道周期改变了约32min, 从11h55min 缩短到11h23min, 不确定度范围约为±2min[8]。
除此之外, 欧洲计划于2024 年10 月发射“赫拉” (Hera) 任务, 该任务是由欧美合作AIDA 计划的另一部分“小行星撞击任务” (AIM) 演化而来, “赫拉” 任务在DART 任务撞击小行星4 年后于2026 年抵达小行星 “迪蒂莫斯” -B, 对“迪蒂莫斯” 双星小行星系统的轨道变化进行测量, 并对“迪蒂莫斯” -B 的大小和表面特征进行探测, 此外也将测量撞击坑的大小和形态特征。
2.2 “深度撞击” 任务
美国国家航空航天局(NASA) 在M.Neugebauer等人提出的“登陆彗星和伴飞小行星” (CRAF)概念设想基础上, 提出了采用超高声速撞击的方式开展科学探测, 以探究彗星内部结构及成分,帮助人们了解太阳系早期状态[9—11]。 “深度撞击”任务的实施为动能撞击防御技术的发展奠定了基础。
(1) 任务方案
撞击彗星目标的选择综合考虑了发射能量(≤15km2/s2)、 接近相位角(<45°)、 接近速度(10 ~15km/s)、 地基观测便利性(距离<1AU,距角>90°)、 与太阳距离(1.0~1.5AU)、 彗核尺寸(半径≥2km) 等任务设计的诸多因素。 “坦普尔” 1 号彗星特征相对明确, 轨道倾角为10.5°、周期为5.5 年[12], 满足任务各方面条件约束, 因此被确认为“深度撞击” 的首选目标。
“深度撞击” 任务探测器于2005 年1 月12日采用“德尔他” 2 三级运载火箭在佛罗里达州卡纳维拉尔角空军基地发射升空, 进入与彗星同方向的顺行轨道, 经过6 个月4.3×108km的深空航行, 于2005 年7 月4 日接近 “坦普尔” 1 号彗星。 飞越器将370kg 铜制小型撞击器送入撞击彗星轨道, 撞击器进行三次轨道微调修正以63°相位角飞向彗星, 释放24h 后以约10.2km/s 的速度击中直径6km 彗星的彗核, 飞越器以“防护模式” 安全掠飞彗核并开展撞击过程观测[13,14]。 NASA 的 “哈 勃” 望 远镜 和“钱德拉” 望远镜也对彗星撞击过程进行了持续观测。 撞击器冲向彗核的动能达到19GJ, 撞击威力相当于4.5t TNT 爆炸, 撞击瞬间彗星表面的细碎物质以5km/s 的速度腾起, 对溅射物的分析表明其中含有细小冰晶体、 大量的二氧化碳以及有机物等物质[15,16], 并且推测在彗核上将形成一个直径约为100 ~200m (足球场大小)、 深度约25 ~30m 的坑[17]。
撞击过程分为三个阶段, 接近段 (approach)、 撞击段 (encounter)、 回视段 (lookback)[18]如图5 所示。 接近段将瞄准误差降低至2km 以下。 撞击段撞击器释放后, 两器建立惯性导航基准开启自主导航模式[19—22], 并建立S 波段通信; 撞击器将光学敏感器瞄准彗星实施高速撞击, 而飞越器则偏转2’ (飞行轨迹将偏离彗核500km 以保证安全飞掠), 并减速100m/s 便于观测撞击过程, 此阶段在撞击前24h (释放撞击器)至撞击后850s (飞越器与彗星达到最小距离)。回视段测定飞越器健康状态、 传送数据并持续开展彗星观测。
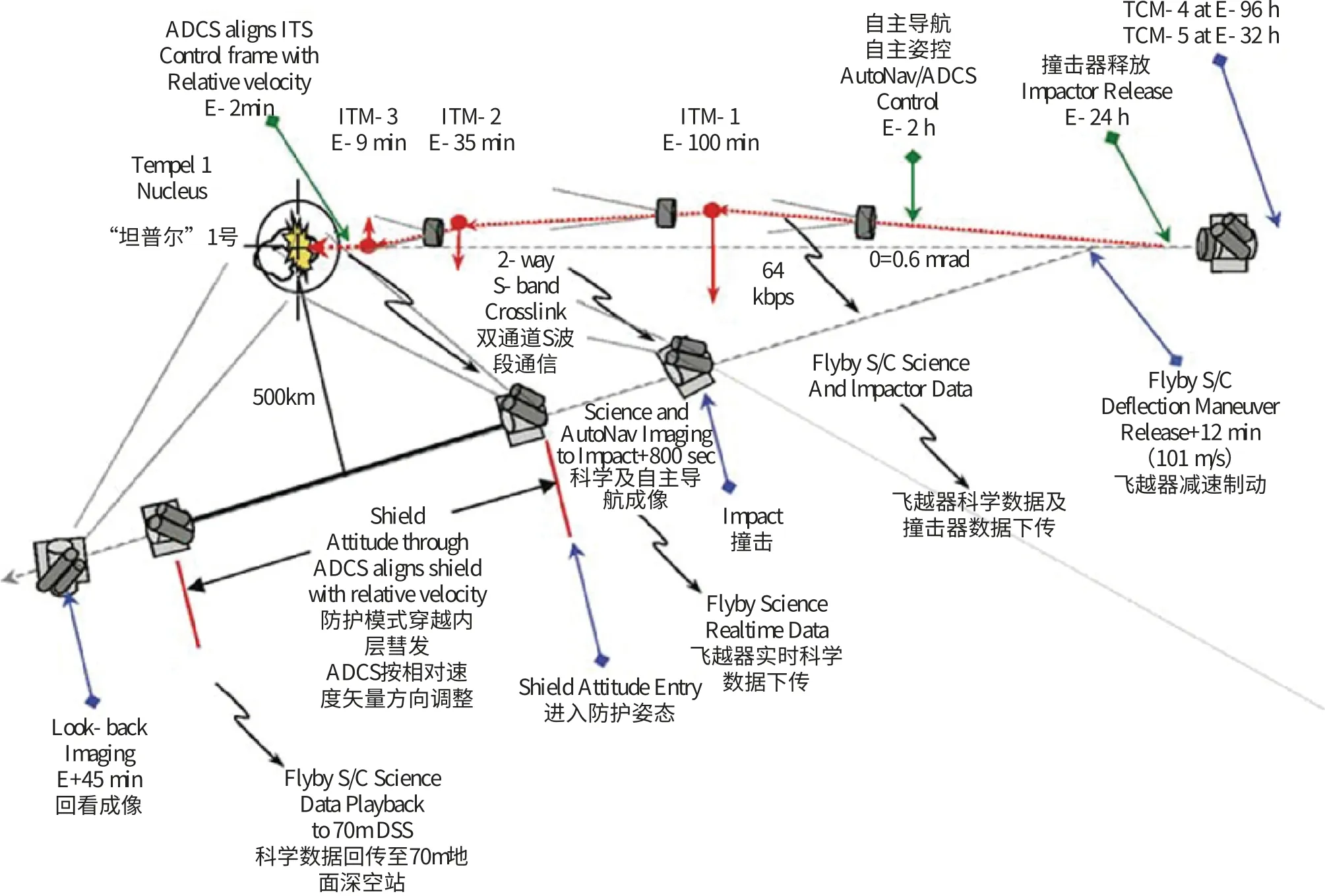
图5 “深度撞击” 任务撞击过程Fig.5 The impact of the Deep Impact mission
(2) 探测器方案
“深度撞击” 探测器系统由飞越器(Flyby)和撞击器(Impactor) 两个独立的航天器组成,系统总质量为650kg, 尺寸为3.2m×1.7m×2.3m,如图6 所示。 飞越器配置有直径1m 的X 波段高增益天线、 S 波段低增益定向天线、 太阳电池阵及小型镍氢电池组、 碎片防护装置、 高分辨率成像仪(HRI) 和中分辨率成像仪(MRI), 外部装有一个四边形的“惠普尔防护罩”, 以屏蔽撞击飞溅的彗星尘埃和流星体粒子。 撞击器为六边锥形结构, 由铜(49%) 和铝(24%) 材料制成。采用铜质材料是因为它容易与撞击后的彗星合成物区分, 并能抵抗光学射线的损伤。

图6 “深度撞击” 探测器构型及组成Fig.6 Probe configuration and composition of Deep Impact
(3) 撞击观测
“深度撞击” 任务飞越器高分辨率相机全程记录撞击发生过程如图7 所示, 撞击后的一段时间, 撞击坑被尘埃遮蔽, NASA 科学家看不到撞击后形成的撞击坑。 2011 年“星尘” 探测器再次飞越“坦普尔” 1 号彗星, 撞击点拍摄图像显示并没发现预期对应的百米级大撞击坑[23], 推测可能是撞击坑随时间发生溃散, 如图8 所示。
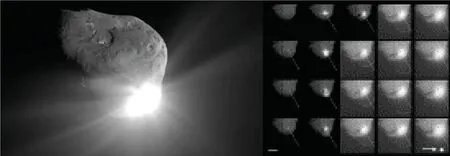
图7 “深度撞击” 飞越器高分辨率相机拍摄撞击过程影像Fig.7 The impact image taken from the Deep Impact's high-resolution camera

图8 2005 年“深度撞击” 探测器拍摄(左),2011 年“星尘” 探测器拍摄(右)Fig.8 The images taken by Deep Impact probe in 2005 (left) and the Stardust probe in 2011 (right)
由于撞击过程中飞越器仅有大约800s 的观测时间, 因此在任务实施前后及撞击过程中, 大量地面及天基观测设备参与其中(包括莫纳亚克等15个天文台以及“哈勃” 等5 台空间望远镜)[24],观测结果表明“坦普尔” 1 号彗星上有着典型的OH、 CN 和C2 组成比, 撞击后喷出的尘埃与气体化学成分显示其上存在有机分子在内的大量硅酸盐, 因此彗核内部存在大量含碳和氮的有机分子(包括氢氰酸、 乙腈、 冰和二氧化碳等), 但彗核表面粉状物中却没有这些物质。 彗星研究首席科学家艾赫恩认为“深度撞击” 的发现为地球生命起源争论提供了更丰富的支撑。
2.3 小结
目前, 国际上仅美国实现撞击技术的在轨实践, 均采用“撞击+掠飞观测” 的任务形式, 在距离撞击目标较近时, 撞击器与观测器分离, 观测器掠飞观测撞击过程及实施科学探测。 “深度撞击” 侧重点在于科学探测, 通过撞击彗星使其露出彗核, 从而详细了解彗核物理特性, 但对于动能撞击在行星防御领域的作用和效能未进行深入研究。 DART 任务验证了动能撞击改变小行星轨道的能力, 具有解除小行星对地球威胁的潜力, 目前该任务主要通过天、 地望远镜进行观测评估轨道变化, 无法开展溅射物及撞击坑形成过程评估, 难以全面系统地实现动能撞击效果的评估。 虽然欧洲计划实施“赫拉” 任务在DART 任务撞击4 年后抵达“迪蒂莫斯” 双小行星系统开展撞击详查, 但其缺乏撞击前观测数据以及撞击过程中近距离演化过程观测数据, 仍然难以对撞击效果开展系统、 全面、 精确的评估。
综上所述, 可以得出以下结论: 一是采用动能撞击是当前发展近地小行星处置技术的首选方案, 具有成熟度较高、 响应速度快等优势, 是建设和发展小行星防御能力的必经之路, 也是应对小型预警目标、 实施干预的有效途径之一; 二是“撞击+掠飞观测” 的任务形式在轨有效观测时间短、 条件受限, 难以获得全面、 高精度的在轨探测数据; 三是依靠以地面为主的观测开展撞击效果评估成果有限, 对撞击坑及其溅射物演化数据获取有限, 由此难以对撞击过程能量转移规律进行研究; 四是提升在轨观测能力, 开展近距离探测的天地联合实时观测是开展有效评估的首选途径; 五是撞击效果的系统性、 精确性评估是国际公认的技术难题。
因此国际上对于小行星防御的技术研究虽取得一定进展, 但整体上尚处于起步阶段, 处置过程能量传递规律尚未完全掌握, 处置技术手段比较单一。 动能撞击作为当前可实现的手段, 对小行星偏转的改变能力较弱, 不足以应对未来真实防御环境下的多种需求。 但当前阶段以动能撞击手段为基础, 系统开展动能撞击防御处置技术验证、 精确评估撞击效能是应对小行星潜在威胁,构建防御体系的迫切需求。
3 小行星撞击防御演示验证任务设想
考虑防御技术发展和精确评估需求, 深入研究撞击过程小行星形貌演化及撞击碎片喷射物演化, 精确评估撞击轨道变化, 掌握撞击过程跨超高速、 高速、 低速, 多相共存、 多物理场相互作用机理为未来部署和建立小行星防御系统的基石。 因此小行星撞击防御演示验证任务宜采用“撞击+在轨实时伴飞观测” + “地面协同观测”的总体方案。 “在轨实时观测” 包括撞击前后探测以及撞击过程探测, 主要针对小行星自身形貌变化、 成分及结构特点进行分析, 同时进行伴飞辅助定轨; 地面观测也包括撞击前、 撞击时及撞击后观测, 主要测定小行星飞行轨道, 同时辅助观测撞击碎片云的整体变化。
3.1 撞击目标筛选原则
撞击目标小行星筛选需要遵循工程可实施性、 效果可测性, 同时满足安全性的原则。
工程可实施性: 目标需相对地球距离适中,轨道倾角较小。 同时, 考虑单星轨道变化的测量周期, 小行星不宜过大, 以获得较大的撞击速度和轨道偏转量。
效果可测性: 在任务实施前应当预留足够时间对选定目标进行天文观测, 同时在实施动能撞击过程中有较好观测条件和地面测控条件, 易于地基观测、 天基观测和联合评估。
安全性: 需保证目标在被撞前和被撞后都不会对地球造成威胁, 因此存在撞击风险的目标不应选为撞击技术验证任务的目标。
3.2 任务特点分析
小行星撞击防御演示验证任务具有以下五个方面的特点及难点。
(1) 目标天体环境条件复杂且不确知
依靠当前地面设施能力, 对小行星特性认识十分有限, 先验知识(如形状、 自转特性、 表面形态、 表面力学特性、 热特性) 匮乏; 目标天体超高速撞击过程中, 受到自转特性影响, 会面临小行星表面的明暗交替变化, 而在伴飞评估和探测过程中将面临小行星表面高低温交变、 表面特性不确定等复杂环境, 对导航控制、 任务规划、热控、 载荷等环节设计提出诸多挑战。 在系统方案设计上, 要求具有更大的裕度和更高的鲁棒性, 以适应目标不确定环境带来的影响。
(2) 撞评结合的轨道设计难
要通过一次任务实现撞击及观测评估的结合, 需要采用双探测器配置的一箭双星方式发射。 观测器与目标小行星交会捕获, 到达时的相对速度尽可能小, 而撞击器超高速撞击小行星,到达时相对速度尽可能大。 此外, 观测器需要早于撞击器数月到达小行星, 以进行评估准备, 这些需求, 使得观测器和撞击器飞行轨道之间具有强耦合关系, 且部分需求互相制约, 大幅增加了轨道设计的难度和复杂性, 给轨道优化设计带来了较大的挑战。
(3) 超高速撞击精度要求高
为了使小行星产生能够评估的速度改变, 必须采用超高速撞击的方式来给小行星提供足够大的动量, 撞击速度高达每秒数千米, 而小行星尺寸仅为百米级以下, 要求撞击精度高于10m。 地面对小行星轨道的观测误差达到200 ~1000km,无法直接支持精准撞击, 撞击器需要在一定距离下(一般为数十万千米以上) 识别目标小行星,并进行相对目标小行星的自主导航, 因此撞击器需具备暗弱目标识别与跟踪、 精确导航和控制能力, 此外, 在撞击前的高速飞行过程中, 要不断地对撞击点误差进行快速修正, 需具备强机动能力, 这些都对撞击器设计和实现提出了更高的要求。
(4) 撞击效果精准评估难度大
由于撞击器和小行星之间巨大的体量差异(质量相差数万倍), 但在每秒数千米撞击的理想情况下, 仅能够给小行星带来厘米/秒级别的速度增量, 其引起的轨道位置变化在半年的观测周期内只有约几百至几千千米, 这相对于约1AU 的轨道半长轴来说是非常微小的, 如何在撞击前后对小行星进行精确测轨, 实现轨道长期(半年以上) 的精准预报, 并利用撞击后的地形变化和飞溅情况来反演撞击效果, 是必须解决的难题。
(5) 超高速撞击过程地面验证难
在轨飞行过程中, 远距离 (数十万千米以上) 识别和跟踪目标小行星, 并实施相对于目标小行星的自主导航, 通过不断修正误差, 最终实现精确撞击, 整个过程中, 飞行速度快、 飞行距离长且撞击结果与目标特性密切相关, 地面难以进行全物理验证, 这对设计和仿真提出了更高的要求, 且需要研究缩比验证、 分段验证等多种验证方法进行物理验证, 确保设计结果可信。
3.3 任务方案概况
与已有的地外天体撞击任务“撞击+掠飞观测” 的任务形式不同, 在实现高精度撞击的同时, 全面、 精确地评估撞击效能是本文小行星撞击防御演示验证任务设计的核心思想, 因此提出“伴飞观测+撞击+伴飞观测” 的任务形式进行方案设计, 包括小行星伴飞观测、 小行星撞击和小行星伴飞评估三个阶段。 三个阶段的任务分别由观测器和撞击器两个探测器实现, 观测器需要早于撞击器数月到达小行星。
具体如下: 通过一箭双星发射观测器和撞击器, 两器入轨分离, 以不同的轨道飞向撞击目标。
观测器从地球到小行星采用直接转移轨道,经深空机动和中途修正到达小行星后实施交会并开展数月科学探测, 包括伴飞定轨、 小行星地表三维观测建模、 物质成分探测以及内部结构测量。 撞击器与观测器一起发射, 采用不同的直接转移轨道, 途中进行深空机动和数次中途修正,撞击器自主捕获到小行星后, 采用自主导航控制策略实现与小行星的撞击。 观测器观测和记录撞击过程, 对撞击溅射物形成过程进行探测, 随后开展伴飞定轨、 小行星地表三维观测等工作, 并与撞击前数据对比, 联合地面观测分析轨道变化、 撞击坑演化等完成撞击效能评估, 如图 9所示。
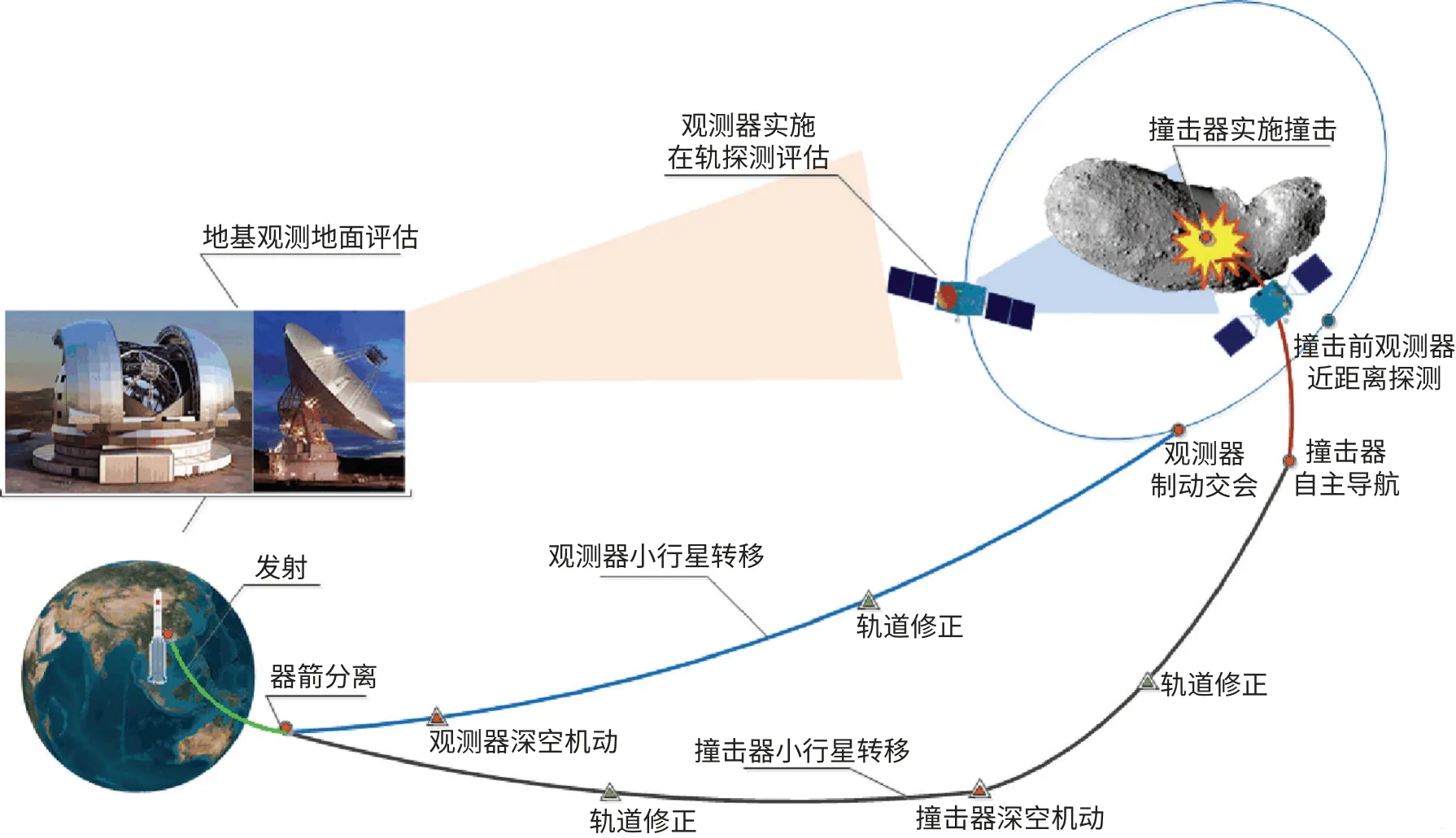
图9 小行星撞击防御演示验证任务“伴飞观测+撞击+伴飞观测” 方案示意图Fig.9 Schematic diagram of the asteroid impact defense demonstration and verification mission“accompanying observation+impact+accompanying observation”
为更好地开展撞击效果评估, 观测器配置彩色相机、 激光雷达等开展小行星撞击前后形貌探测, 配置微波雷达开展小行星结构探测, 配置可见红外光谱仪等开展小行星成分探测以获得详细的小行星特性信息, 配置高分辨率成像设备用于获取撞击前后小行星高分辨率影像和飞溅物图像。 撞击器配置监视相机和撞击过程探测包用于获取撞击过程影像和过载、 冲击、 振动、 压力的环境变化。
3.4 关键环节设计
(1) 撞击器超高速撞击
撞击器超高速撞击过程采用逐渐逼近的方式, 在距目标小行星40 万~50 万千米进行目标捕获, 并在距目标数万千米之前通过自主导航数次修正, 大幅降低目标小行星星历误差, 以减小后期轨道控制速度增量。 在最后的撞击段飞行过程中, 撞击器通过高精度的自主导航和快速机动,经过3~5 次修正, 实现小行星的精准撞击。
小行星撞击精度主要由导航误差和轨道控制误差决定: 导航误差主要取决于导航敏感器测量和数据处理精度, 轨控误差主要受推力器执行误差、 加速度计测量误差、 姿控误差和制导解算误差影响。 基于我国小行星探测及采样任务( “天问” 二号) 针对窄视场导航敏感器、 图像处理、自主导航与控制算法技术的攻关, 进一步提升硬件水平、 优化控制算法及策略, 探测器在大约40 万~50 万千米捕获目标小行星并接近飞行过程中, 采用逐段收敛的方法进行误差修正, 如图10所示, 最终实现撞击导航精度满足任务需求。

图10 小行星逐渐逼近撞击方法误差收敛示意图Fig.10 Schematic diagram of error convergence of asteroid approach impact method
(2) 在轨评估观测
观测器对撞击效能的在轨评估观测主要包括三方面内容: 轨道变化评估、 地形地貌变化评估以及溅射物观测评估。
轨道变化评估: 观测器悬停在小行星附近开展伴飞测量, 地面对观测器进行多次长时间测定轨获取高精度轨道数据由此获得小行星高精度轨道预报, 通过对比撞击前后所测得高精度轨道预报数据进行比对, 实现小行星撞击前后轨道变化评估, 如图 11 所示。
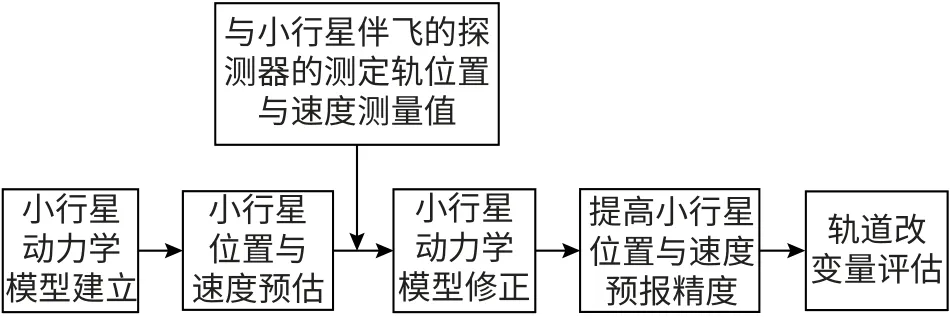
图11 小行星伴飞测量评估示意图Fig.11 Schematic diagram of asteroid accompanying measurement evaluation
地形地貌变化评估: 观测器设置多个观测站开展悬停探测实现小行星地形地貌三维建模。 依据小行星表面特征选取面片, 将三维表面模型划分为不同的块; 将光学影像映射(配准) 到每块面片; 使用配准后的面片影像通过SPC 精细化对应的三维模型; 利用最小二乘方法拼接和全局优化各面片, 得到高分辨率的小行星三维表面模型如图 12 所示, 并与激光一体化导航敏感器扫描的全球高精度点云数据进行融合, 最终获得高精度DEM 模型。 通过对比撞击前后高精度DEM 模型, 实现小行星地形地貌变化评估。

图12 小行星地形地貌三维建模Fig.12 Three-dimensional modeling of asteroid topography and landform
溅射物观测评估: 撞击过程及溅射物观测由观测器携带的高分辨率成像设备完成, 观测器在与撞击方向垂直的方位进行观测是最优选择, 考虑光照条件以保证观测效果, 观测位置的选择需满足太阳-目标小行星-观测器夹角为50°~70°。考虑观测器在轨安全工作, 观测位置距离小行星保持数十千米安全距离, 撞击过程及溅射物观测如图 13 所示。

图13 撞击过程及溅射物观测Fig.13 Impact process and sputtering observation
4 关键技术
我国前期在探月工程和行星探测工程中, 在行星际飞行轨道规划与设计、 远距离测控通信、探测器自主控制、 高效电能源技术、 先进电推进技术等方面奠定了较好的技术基础, 正在研制的小行星采样任务在高精度自主导航、 小行星近距探测、 变外热流自适应热控技术、 轻小型高精度载荷等方面均取得突破, 相关技术可直接应用于撞击防御演示验证任务中, 结合小行星撞击防御演示验证任务特点的分析, 还需要针对以下关键技术进行攻关。
(1) 两器协同约束条件下的轨道优化设计技术
基于我国火星探测任务及小行星采样任务轨道设计技术基础, 建立针对小行星撞击防御演示验证任务的轨道设计模型, 结合小行星撞击防御演示验证任务特点得到合理的优化设计目标, 采用高效的优化求解技术, 同时考虑运载约束和任务约束获得整体发射能量小, 同时满足超高速撞击的轨道设计方案。
(2) 不确知目标特性下的高速高精度导航、制导与控制技术
针对小型暗弱目标的自主导航, 我国小行星采样任务在窄视场导航敏感器设计、 研制和试验上已具备基础, 但针对超高速撞击需要开展暗弱小行星高精度成像导航敏感器的优化设计和暗弱目标的高精度图像算法攻关, 以实现更大范围和更高精度的小行星视线方向精确测量。 同时参考已有小行星数据信息, 完善小行星图像模拟技术, 研制高精度小行星模拟器, 构建高置信度的小行星逼近撞击过程自主导航制导与控制半物理仿真验证系统, 实现高速高精度撞击地面验证。
(3) 高精度协同观测评估技术
当前, 我国小行星采样任务已经开展小行星探测悬停技术的攻关, 基于此研究撞击前后伴飞测定小行星轨道的方案, 并进一步提高测距、 测速和VLBI 测轨精度, 综合利用导航敏感器能力,研究撞击前后观测器与小行星相对距离、 角度等变化的天基测量方案, 以此建立天基监测数据反演模型, 实现测量数据到小行星速度变化量、 速度变化方向等的精确映射, 反演撞击效能, 基于探月工程和“天问” 一号探测任务构建的深空探测地面协同合作机制, 利用以往深空探测任务航天器总体与地面应用系统及测控系统协作及数据协同经验, 实现地基观测、 天基数据反演的撞击效能高精度协同评估。
(4) 小行星动能撞击瞬时处置效能仿真与验证技术
根据撞击器-小行星-撞击碎片系统在撞击过程的不同阶段的动力学特征, 分别建立精确的理论和数值计算模型。 开发超高速-高速-低速全流程的混合架构并行算法, 建立跨速域的撞击全过程的高效数值计算方法。 设计模拟微重力环境的颗粒系统超高速撞击试验装置, 开展小行星撞击过程地面模拟试验, 根据试验数据对数值计算模型的关键参数进行标定和修正。
5 结语
近地小行星对于人类生产生活的威胁始终存在, 开展小行星撞击防御演示验证任务, 实现动能撞击技术突破具有重要的科学、 社会、 人文意义, 是建设航天强国、 实现人类命运共同体的具体实践。 综合国内外发展趋势, 本文提出“伴飞观测+撞击+伴飞观测” 的小行星撞击防御演示验证任务方案设想, 并结合任务特点, 明确在后续研究中需重点在两器协同约束条件下的轨道优化设计技术, 不确知目标特性下的高速高精度导航、 制导与控制技术, 高精度协同观测评估技术, 小行星动能撞击瞬时处置效能仿真与验证技术等方面集智攻关, 系统地完善和促进我国小行星防御技术的综合发展。
