两种Skyhook阻尼实现方式在柔性隔振平台中的对比研究
2022-04-21孔永芳
孔永芳
(1.上海航天控制技术研究所,上海201109;2.中国航天科技集团公司 红外探测技术研发中心,上海201109)
为避免星上精密设备的性能因航天器中扰动的影响而降低,需要采取振动控制的技术进行扰动减缓[1-7]。振动隔离是其中一个重要的措施。传统的隔振器由弹簧和阻尼并联组成,存在被保护设备质量和连接刚度引起的隔振器固有频率,类似于“刚体模态”,可以在远高于该固有频率的高频段提供良好的振动隔离。此频率相当于被动振动传递的转折频率。通过设计软弹簧形成具有柔性转折频率的隔振平台,允许较低频率的振动隔离[1]。但这种形式的隔振装置在并联被动阻尼的选择中需进行权衡,即减小隔振器模态处的共振响应只能以高频隔振性能下降作为代价。添加主动控制有利于改善低频的隔振效果。Karnopp 教授提出的Skyhook 阻尼控制是其中一种简单的主动控制方式,它利用负反馈控制器产生与被控对象的绝对速度成比例的力,能够有效地抑制低频段隔振器模态引起的共振峰,且不降低高频隔振能力[8]。1980年,Skyhook控制被引入到柔性航天器的主动隔振控制中,通过调节控制器增益即可实现低频姿态控制力矩的传递和高频扰动的衰减[9]。
在实际使用中,Skyhook 阻尼通常通过积分加速度反馈实现。此外,因为有效载荷的加速度与有效载荷和隔振装置连接界面传递的总力成比例,所以用力传感器代替加速度传感器安装在接口的负载侧,通过积分力反馈(Integral force feedback,IFF),也可以实现Skyhook 阻尼[10]。这两种实现方式对于连接两刚性体的单轴隔振器来说是等价的,但是,当隔振器要保护的对象为柔性的时候,它们不再完全等价。Preumont 等[11]已基于理论分析,讨论了两种方式用于柔性结构振动隔离时在稳定性和对高阶模态阻尼效果方面的区别;并指出在大质量有效载荷隔振控制中,IFF法具有传感器灵敏度要求更易实现的优势[10];还说明了在采用IFF 法的六自由度柔性Stewart隔振平台中,实际柔性铰链残余刚度对系统的隔振性能有着显著影响[2]。
星载设备主动隔振常常基于柔性Stewart 平台设计。多种复杂的控制器被提出,用于实现平台更好的振动隔离能力[3,12-13]。但是,在传统的两参数隔振器构成的柔性Stewart平台中,由于隔振器刚体模态的阻尼比较小,有的复杂控制器设计存在稳定性难题,通过引入Skyhook 主动阻尼作为内环来缓解刚体模态的共振,可有效提高控制系统的稳定性[13]。文献[14]中也有类似的应用。此外,采用隔振指向一体化控制的策略,在柔性Stewart平台中添加Skyhook 阻尼和简单的主动指向控制,即可满足有效载荷在指向轴方向上全频段高水平的振动隔离[5]。通过合理的机械设计能够简化控制系统的设计和实现。因此,进一步讨论Skyhook阻尼,了解其两种实现方式用于柔性隔振平台得到的减振效果的区别,并提出相应平台设计的意见,仍具有一定的指导意义。本文基于已研制的柔性Stewart平台,通过理论分析阐明了为缓解隔振器刚体模态共振的两种实现方式控制增益的选取办法,结合多个ADAMS 和MATLAB 联合仿真案例对两者开展了详细的对比研究,更直观地解读Preumont等[11]的理论研究结果。最后给出了选取意见。
1 两种实现方式的控制原理
所研制的柔性Stewart 平台样机上下平板均为刚性,分别代表负载和基座;6根作动杆设计成相同的,均由音圈电机并联软弹簧组成;构型为Cubic[10]。平台的示意图及采用的坐标系如图1 所示。{U}为惯性参考坐标系,{P}和{B}分别为固连在上、下平板的本体坐标系,它们的原点位于各自的质心处,Z轴垂直板面向上。在初始时刻,平台处于标称构型,具有高度的对称性,{P}和{B}的OXZ平面位于平台的对称面,并且各坐标系的坐标轴均相互对齐。

图1 Stewart平台示意图
为了开展控制器设计,首先建立平台的理论动力学模型。具体的推导过程如参考文献[5]所示,在惯性参考坐标系{U}中进行动力学分析,得到这种形式的隔振器在频域中的闭环刚体系统动力学模型:

所研制的隔振平台适合采用分散控制策略,且各杆可以采用相同的控制算法[5]。
对作动杆i施加积分绝对加速度负反馈控制,写成Laplace形式为:

式中:fai是作动器i输出的控制力,asi是作动杆i与负载连接处的杆向绝对加速度响应,g为控制增益系数。
利用速度雅可比矩阵,结合式(2),基于负载的绝对加速度矢量给出平台控制力,代入式(1)可得隔振平台的闭环位移传递关系:

通过求解g=0 时该系统的闭环特征值,即可得到隔振器的刚体模态频率ωi。基于文献[15]中分析直接速度反馈主动阻尼控制时采用的方法可知,该系统的开环零点满足:

由此可知,该系统在s平面的原点处存在开环零点。分析系统的闭环根轨迹可得,调节控制增益g使隔振器各阶刚体模态的阻尼比不小于0.707,能够完全抑制隔振器刚体模态引起的振动传递共振峰。并且实际柔性铰链的残余刚度Ke也不影响上述结论。
利用模态空间将闭环系统特征值问题进行解耦简化:

于是,积分加速度反馈的控制增益g可以根据式(5),按照刚体模态阻尼比不小于0.707 为标准进行设置。
如果对作动杆i施加积分力负反馈控制,写成Laplace形式为:

式中fai是作动器i的输出力。
此时,隔振器闭环的位移传递关系为:

根据参考文献[15],考虑柔性铰链的残余刚度Ke,该系统的闭环特征方程可写为:

系统的开环极点仍是隔振器的固有频率。但当g趋于无穷时,系统开环零点不在s=0 处,而是通过求解下列方程的特征值问题得到:

这样,刚体模态根轨迹终止的开环零点与原点之间就会存在一定距离,刚体模态阻尼比很可能无法大于0.707,闭环振动传递率在隔振器刚体模态之前会出现一定的超调,即有残余的刚体模态共振影响。因此,必须合理地设计柔性铰链,尽量减小其在各转动方向的残余刚度。同时,要求6 个刚体模态的跨度尽可能小,使它们的模态阻尼比达到最大时的增益g相差不大,实现对振动传递率曲线中各刚体模态共振峰均有较好的抑制效果。
在控制增益设计方面,仍然先利用模态空间将闭环系统特征值问题简化为一组解耦的方程:

再以刚体模态阻尼比为0.707 的期望初步确定所需的增益系数g。
2 仿真对比研究
基于已研制的柔性Stewart 型隔振平台,通过ADAMS 和MATLAB 联合仿真案例,更直观且详细地分析根据两种实现方式得到的阻尼效果的区别。
首先,针对具有刚性上平板的隔振样机开展研究,记为Case 1。利用ADAMS 建立隔振平台刚柔耦合动力学模型,并导出模型参数到MATLAB。在MATLAB/Simulink 中,接入控制模块,搭建完整系统的仿真模型,以2 kHz的采样频率分析隔振效果。系统的隔振效果通过上、下平板相干方向绝对加速度的比值来衡量。
在下平板质心处施加沿单个自由度方向的白噪声扰动加速度激励,持续时间为20 s,依次对六个自由度方向进行仿真分析。
基于无控(被动隔振)、施加不同增益系数的积分加速度反馈控制和不同增益系数的IFF控制得到的六自由度方向上相干振动传递率幅频特性曲线分别如图2 至图4 所示。图中Freq表示频率,Txp、Typ、Tzp、Tx、Ty、Tz分别代表上、下平板沿X、Y、Z方向上的平动自由度,Rxp、Ryp、Rzp、Rx、Ry、Rz分别代表上、平板绕X、Y、Z方向上的转动自由度。因为系统的对称性,沿X和Y方向、绕X和Y方向的振动传递率曲线几乎分别重合。

图2 Case1无控仿真振动传递率幅频特性曲线
从图2 可以看出,隔振器无控状态下在其刚体模态处有不可忽略的共振响应,使得振动传递率曲线在低频段转折频率处出现较大的峰值。
比较加控前后分析结果可知,使用Skyhook 法控制后隔振平台实验样机振动传递率幅频特性曲线的刚体模态共振峰能够被大幅度地抑制。
图3表明提高积分加速度反馈控制的增益有利于进一步改善各阶刚体模态的阻尼比,实现振动传递率曲线中基本没有刚体模态引起的共振峰。

图3 Case 1不同增益积分加速度反馈控制仿真振动传递率幅频特性曲线
利用式(10)和图2给出的模态频率可知,IFF控制增益为40 时,理论上可以令前2 阶刚体模态阻尼比大于0.707,但图4(a)显示该增益下,各方向振动传递率曲线在刚体模态之前都出现了一定的超调,即各模态阻尼比均没有达到0.707。图4(b)又表明增益提高到50后,除绕Z向转动自由度以外,其它5个方向振动传递率曲线的峰值均不减反而还有所加大。由此可见,IFF法不能使该平台所有的刚体模态阻尼比同时达到最大,在控制增益的选择上需要进行折衷考虑。

图4 Case1不同增益积分力反馈控制仿真振动传递率幅频特性曲线
然后,将一根柔性杆与样机的上平板固连,对有效载荷具有低阶柔性模态的情况开展研究,记为Case2。激励工况、采样频率和仿真时间不变。
图5 至图7 分别给出了该模型在无控、增益400积分加速度反馈控制和增益50的IFF控制条件下得到的6 自由度方向上相干振动传递率幅频特性曲线。图5中的TR表示传递率的幅值。
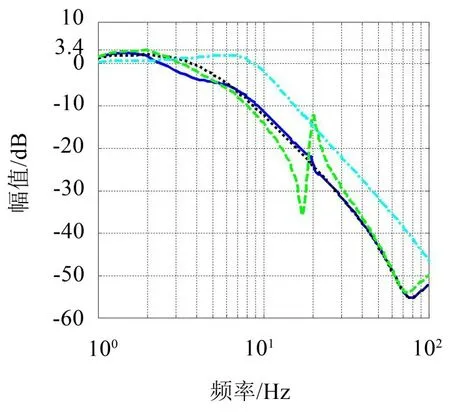
图7 Case2增益50积分力反馈控制仿真振动传递率幅频特性曲线
从图5 可以看出,因为有效载荷柔性模态的存在,无主动控制时隔振器绕X和Y方向的振动传递与原来的相比,在20 Hz附近出现明显的峰值,隔离能力降低。

图5 Case2无控仿真振动传递率幅频特性曲线
再结合以抑制约4 Hz~8 Hz低频刚体模态为目的而设计的2种Skyhook控制实现方式的仿真结果,通过比较可知,积分加速度反馈控制使20 Hz 有效载荷柔性模态引起的振动传递共振峰衰减了9 dB左右,相比于对20 Hz 模态几乎没有改善阻尼作用的IFF控制具有更好的高阶模态阻尼减振效果。
3 选取意见
Preumont 等[15]已经指出,在一些低频问题的应用中,力传感器比加速度传感器更灵敏。比如,灵敏度为10-3N的力传感器是常见的,但对于1 000 kg的负载,相应的加速度需要10-6m/s2,这样的加速度传感器灵敏度就比较难实现。因此,对于质量在100 kg以上的有效载荷,对其隔振平台建议使用各作动杆上的力传感器进行主动控制,即可以选择IFF 法为隔振器刚体模态提供主动阻尼。同时,平台的设计必须满足:
(1)充分减小柔性铰链在自身各转动方向的残余刚度;

图6 Case2增益400积分加速度反馈控制仿真振动传递率幅频特性曲线
(2)6个刚体模态的跨度要尽可能小。
对于质量小又有较低频率柔性模态的有效载荷,对其隔振平台则更建议选用各作动杆的积分加速度反馈控制来限制刚体模态的共振峰。并且为了确保主动控制的稳定性,隔振器的各个刚体模态频率必须设计得小于有效载荷的柔性模态频率[11]。
4 结语
本文针对用于抑制柔性隔振平台刚体模态的Skyhook 主动阻尼的两种实现方式,即积分加速度反馈和积分力反馈,开展了对比研究。通过理论分析阐明了两者控制增益的选取办法。结合多个仿真案例,详细分析和比较了这两种方式的阻尼效果,更直观地解读理论研究结果。分析结果表明,积分力反馈适合大负载,并要求隔振平台设计满足具有充分小的柔性铰链残余刚度和刚体模态跨度;积分加速度反馈比积分力反馈有更好的高阶模态阻尼效果,适合质量小又有较低柔性模态的有效载荷,平台设计须保证刚体模态频率小于载荷的柔性模态频率。