考虑路面坡度和摩擦系数的自动紧急制动系统设计*
2022-04-21吴镇平向铁明吴武和
吴镇平 向铁明 吴武和
(1漳州职业技术学院汽车工程学院 福建漳州 363000;2厦门理工学院机械与汽车工程学院 福建厦门 361000;3漳州市润声汽车配件有限公司 福建漳州 363000)
自动紧急制动(automatic emergency braking,AEB)系统是降低交通事故社会成本的最有效途径之一[1].大多数追尾事故都是由于驾驶员注意力不集中引起的,可以通过警告碰撞危险和/或必要时自动刹车来预防[2-3].Cicchino[4]认为,在低速情况下,AEB系统可以减少约43%的追尾事故和50%的追尾伤害.Wismans等[5]研究了亚洲道路安全策略的现状,报告称采用AEB可节省约13亿欧元的维修费用.
Euro NCAP[6]发布的AEB方案是在正常条件下进行测试,以达到评估的客观性和便利性.假设路面摩擦系数接近0.9,路面坡度小于1%等级,没有干扰传感器检测的物体.在这种正常情况下,AEB系统的触发可以根据碰撞时间(time to collision,TTC)和车辆的停车距离[4]来确定.此外,一些研究人员[7-9]研究了人为因素对追尾事故风险的影响,发现驾驶员可能低估了路面坡度或制动时摩擦力的差异.
在实际情况下,AEB系统如果不考虑路况的变化,就很难避免追尾事故[10].从这个角度出发,Zhang等[11]开发了一种模型预测AEB算法,该算法能够在有限的路况下优化驾驶员的安全性和舒适性.Tagesson等[12]考虑了撇开摩擦路面条件来验证重型车辆运动的AEB效应,但研究的重点是车辆的横向运动.Jeon等[13]基于V2V通信研究了坡度和摩擦的影响,但该系统仅在理想条件下进行仿真验证.
为了考虑路面状况,需要获取路面摩擦、路面等级等路面参数信息[14-15].在AEB系统设计中利用路面摩擦已进行了大量的研究[16-19].Han等[20]开发了基于峰值路面摩擦的AEB算法,峰值路面摩擦是由计算的纵向、横向和法向轮胎力估算出来的.Yi等[21]利用实验数据作为拟静力模型来识别摩擦系数曲线,并设计了一种自适应AEB算法.Khaleghian等[22]对轮胎路面摩擦估计进行了调查,认为基于模型的估计与基于实验的方法相比具有较高的精度和良好的重复性.一些研究人员也使用基于模型的方法估计了道路坡度.例如,Bae等[23]提出了两种基于GPS(global positioning system)信息的估算坡度角的方法.采用了多种方法来估计道路坡度角,如带遗忘的递归最小二乘和多速率卡尔曼滤波.
该研究在AEB控制算法设计中考虑了道路坡度和摩擦力,避免了真实道路情况下的碰撞.实时估计路面摩擦和坡角信息用于控制器设计.该AEB系统的配置如图1所示,AEB是根据道路情况自适应触发的.其中,最小停车距离的调整考虑了路面摩擦系数和坡角.为了验证所提算法的有效性,构建了一个集成控制软件和车辆动力学软件的仿真工具进行联合仿真.此外,该仿真工具还扩展了一个交通仿真软件,从而可以在仿真中评估AEB测试协议.所开发的算法嵌入到快速控制原型单元中,并在各种斜坡道路的现场测试中验证了其性能.

图1 AEB系统的配置
1 AEB最小停车距离
车辆的纵向运动是激活AEB系统的关键因素.根据路面摩擦力和坡度的不同,AEB的最大减速度和停车距离也不同.因此车辆的最大减速度用式(1)描述,上坡或下坡时的重力效应如图2所示.
amax=-(gsinθ+μgcosθ)
(1)
式(1)中μ:路面最大摩擦系数;g:斜坡路面角度(上坡标志为+)
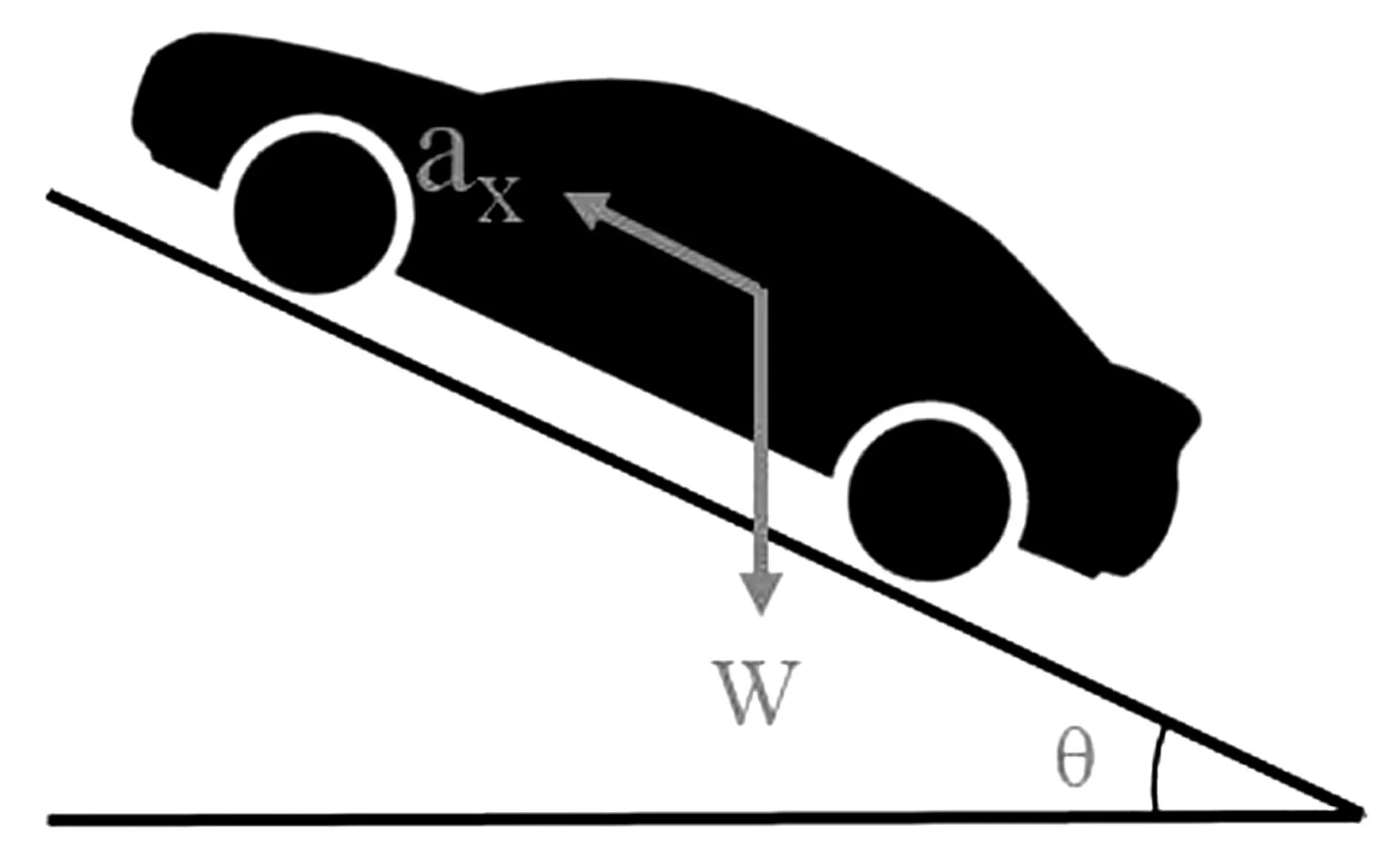
图2 斜坡上向上行驶的车辆示意图
该研究采用Kim等[24]的方法来估计道路坡角,其中考虑了动力总成扭矩和纵向运动中的阻力来提取纯重力效应.采用Hong等[25]的基于模型的估计方法来估计路面摩擦系数,其中采用了扩展卡尔曼滤波和递推最小二乘.
如Euro NCAP AEB Test Protocol[6]所述,AEB有三种评估场景;CCRs(车到车静止),CCRm(车到车移动)和CCRb(车到车制动).在本研究中,CCRb还分为目标车辆停止CCRb1和目标车辆减速CCRb2两种情况.四种情况的速度-时间图如图3所示.目标车速或零车速的交叉口表示两车之间的最小距离.将相对速度积分到交叉口时间,计算出最小制动距离,如式(2)所示.

(2)
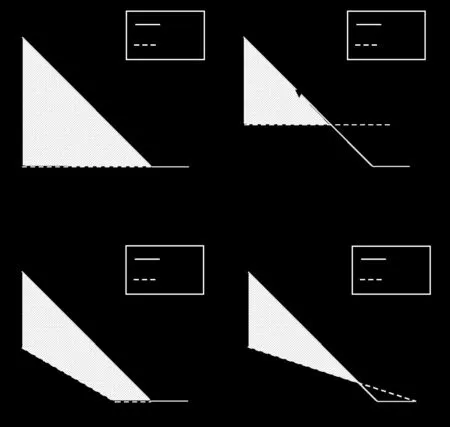
图3 四种场景下的速度-时间图
首先,图3中左上角的图显示了一个CCRs案例,其中主机车辆以减速的方式接近已停止的目标车辆.当减速恒定时,它的停止距离等于速度-时间图的面积.
(3)
式(3)中Vhi:AEB运行时主车的初速度;ahx:主车的加速度
考虑路面摩擦系数和路面坡度,将式(1)代入式(3)可得到CCRs工况下的最小停车距离.
(4)
其次,如图3右上图所示的CCRm案例中,主机车辆在减速过程中接近匀速行驶的目标车辆.相对速度下的停车距离用式(2)表示.
(5)
式(5)中Vti:AEB运行时目标车辆的初速度.
将式(1)代入式(5),考虑路面摩擦系数和路面坡度,可得到CCRm工况下的最小停车距离.
(6)
考虑了主机和目标车辆以不同速度减速的两种CCRb情况.CCRb1情况如图3左下图所示,目标车首先停止,主机车正在制动.在这种情况下,停止距离等于两条速度线之间的面积.
(7)
式(7)中atx:目标车辆的减速.
将式(1)代入上式,得到主车在不同摩擦系数的斜坡路面上时CCRb1情况下的最小停车距离.
(8)
最后,如图3右下图所示的CCRb2案例,主车辆在制动过程中接近减速目标车辆.
在这种情况下,以相对速度停止的距离等于两条速度线到交点的面积.
(9)
将式(1)代入上式,得到最小制动距离
(10)
2 AEB控制算法设计
文章所提出的控制系统由系统的激活控制和系统运行过程中的减速控制两部分组成,特别是在减速控制器中考虑了制动特性.
2.1 AEB系统的激活控制
AEB系统应该等到司机能够介入的最后一刻,当主车到达第2节中最小距离时,AEB被激活,几乎避免碰撞.然而,在实际情况下,对路面摩擦力和路面坡度的估计可能存在误差.在AEB运行过程中,任何系统延迟和参数错误都可能导致意外碰撞.AEB应及时启动,启动的减速应在能力范围内足够大.为了提高AEB系统的鲁棒性,在式(4)、(6)、(8)、(10)的最小停止距离中引入裕度参数at
(11)
(12)
(13)
(14)
上述方程中的边际值可以根据道路参数的标准差来确定.路面坡度通常是恒定的,但摩擦系数很难估计,因此在边际值中考虑了摩擦系数的置信度.例如,当置信水平为98%,标准差为0.05时,给定置信水平的置信区间为2.3263σ.由此统计计算,边际值应小于1- 2.3263×0.05 = 0.8837.
裕度参数的影响如图4所示,AEB在10%的下坡和摩擦系数为0.5的湿滑路面上被激活.如图4 (a)所示,没有余量的AEB启动时间稍晚,所需的减速度大于当前路况下可用的最大减速度.由于AEB的关键特性,在这种情况下,AEB运行的一个小延迟导致碰撞.另一方面,带裕度参数的AEB通过提前激活AEB(如图4 (b)所示),可以提供鲁棒的避让性能.

(a) aR=1.0 (b) aR=0.8图4 斜率θ=10%,摩擦力μ=0.5的AEB结果
2.2 AEB减速控制
采用雷达、视觉摄像机等环境传感器测量相对距离和速度后,可正确判断CCRs、CCRm和CCRb之间的碰撞情况.即使使用式(11)到式(14)的最小停车距离来激活AEB算法,AEB运行过程中情况也可以根据主机和目标车辆的速度变化而变化.
首先根据测量到的主机与目标车辆之间的相对距离和速度,得到所需的主机车辆的减速.式(3)、(5)、(7)、(9)分别对CCRs、CCRm、CCRb1、CCRb2的加速度进行逆计算.
(15)
(16)

(17)

(18)
式(15)(16)(17)(18)中Rd:主机和目标车辆之间的相对距离.
减速控制器采用带前馈项的PI控制器设计.前馈项是为了考虑制动执行器的特性,并包含主缸压力与车辆减速之间的关系.根据如图5所示的制动单元的配置,假设所施加的制动力小于道路上的最大摩擦力[26],可以使用车轮动力学计算制动力.

图5 制动单元构成
(19)
式(19)中,Fbrake:轮胎制动力,Pmaster:主缸压力,Acaliper:卡钳活塞垫面积,μpad:刹车片与转子之间的摩擦系数,rpad:刹车片摩擦的有效半径,reff:轮胎有效半径,Fslope:倾斜力.
纵向车辆动力学[26]用于计算所需加速度的压力输入.基于式(19)制动力,纵向动力学方程为:
(20)
其中m是飞行器的质量.然后,输入到主缸的压力可以用期望的加速度和斜角来描述.
(21)
由于存在发动机制动、曳力、滚动阻力等时滞和扰动,因此添加PI控制器来补偿加速度误差,减速控制器的最终形式为:
(22)
其中aerr= ad- ahx.Kp和Ki分别是PI控制器的比例增益和积分增益.所需的加速度ad,根据机动情况描述为公式(15)到(18).控制增益的初始值是根据Ziegler-Nichols调优规则[27]确定的,并在本研究中针对各种路况进行调优.
3 AEB系统仿真
由于AEB系统的验证可能涉及危险事故,因此AEB系统的仿真非常重要.特别是,在AEB运行过程中,不确定的路况会导致碰撞,因此需要在仿真中充分评估.
3.1 AEB系统仿真工具的构建
为了验证所提算法,使用Simulink (MathWorks, Inc,2013)、CarSim (Mechanical simulation, 2013)和PreScan (Tass International, TNO, 2015)构建AEB系统仿真工具.提出的AEB控制算法在MATLAB Simulink中建立,并与CarSim和PreScan进行联合仿真.在MATLAB的Simulink中还包含了路面坡度和摩擦系数的估计算法.CarSim是利用车辆动力学模型精确计算车辆运动的工具,可以改变不同坡度和轮胎-路面摩擦的路面状况.PreScan用于描述不同道路形状的基础设施,其传感器模块提供基于给定道路基础设施下车辆运动的传感器输出.传感器的噪声量使用Simulink建模,因为PreScan为所有类型的ADAS传感器提供了理想的障碍信息.文章将传感器的噪声建模为高斯噪声,并通过实验数据进行了验证.
仿真的自动化过程也使用MATLAB脚本代码开发,已经进行了数百次仿真,以分析不同路况的影响.基于CarSim的COM接口和PreScan的命令行接口,在预先设定的测试场景条件下实现自动化,改变道路和车辆参数.一次仿真完成后,将结果保存在MATLAB工作空间中,使用MS PowerPoints的COM接口和VBA脚本功能进行后处理生成仿真报告.这些报告包含仿真设置参数、车辆间隙、碰撞速度以及位置、速度和加速度图.模拟试验条件包括路面坡度、摩擦力和主车纵向初速度.
3.2 仿真结果
该AEB系统已通过了欧洲NCAP AEB协议的验证,如AEB汽车到汽车后静止(CCRs)和汽车到汽车后移动(CCRm)测试程序.文章对所提出的AEB在不同道路坡度和摩擦条件下的性能进行了评估,其结果如图6所示,不考虑路况的AEB算法如左图并与所提出的系统如右图所示进行比较.将AEB激活后的期望距离设定为距离目标100 cm.负号表示距离小于预期的100 cm的间隙,因此大于100 cm的负误差表示AEB激活过程中发生碰撞.
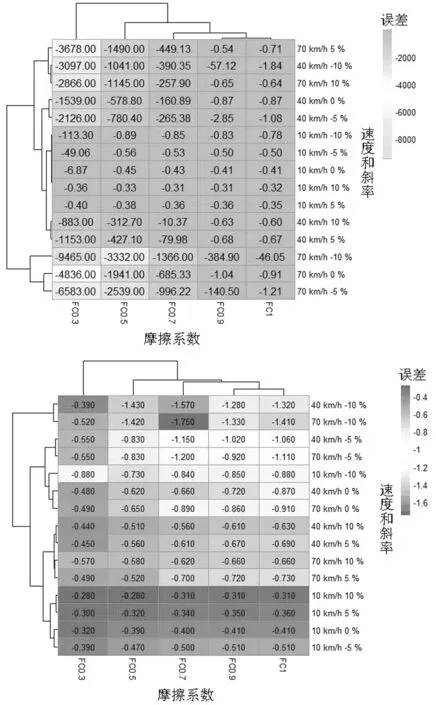
图6 目标距离和停止距离之间的误差分析
研究中运用K均值聚类来分析处理没有道路信息的AEB(图6上图)和文章所述AEB(图6下图)中目标距离和停止距离之间的误差数据.为了保证数据的真实性,没有对“没有道路信息的AEB”的误差进行标准化.
从没有道路信息的AEB(图6上图)聚类分析结果可以看出,摩擦系数在0.3且数度和斜率为70km/h -10%时是误差最大,单独成类;而在该摩擦系数下,70km/h -5%和70km/h 0%归为一类,表明虽然误差较大,但没有道路信息下的AEB对这总斜率下的误差识别没有差异.
文章所述AEB(图6下图)的聚类结果,可以看出70km/h-10%与40km/h-10%聚成一类,也就是说,对于该系统仿真结果而言,这两种速度在同一斜率下造成的误差没有差异.
另一方面,该AEB在考虑路况的最小距离下被激活,并控制其减速,使车辆在距离目标车辆1m处停止.在不考虑道路条件的情况下,该系统以约1m的间隙停止主车,且不与目标车发生碰撞.图7为CCRs案例所提议的AEB的范围、速度和加速度.AEB激活时间和停止时间分别用虚线和垂直线表示.仿真结果表明,所提出的AEB系统能够有效地避免不同坡度和低摩擦路面的追尾碰撞.
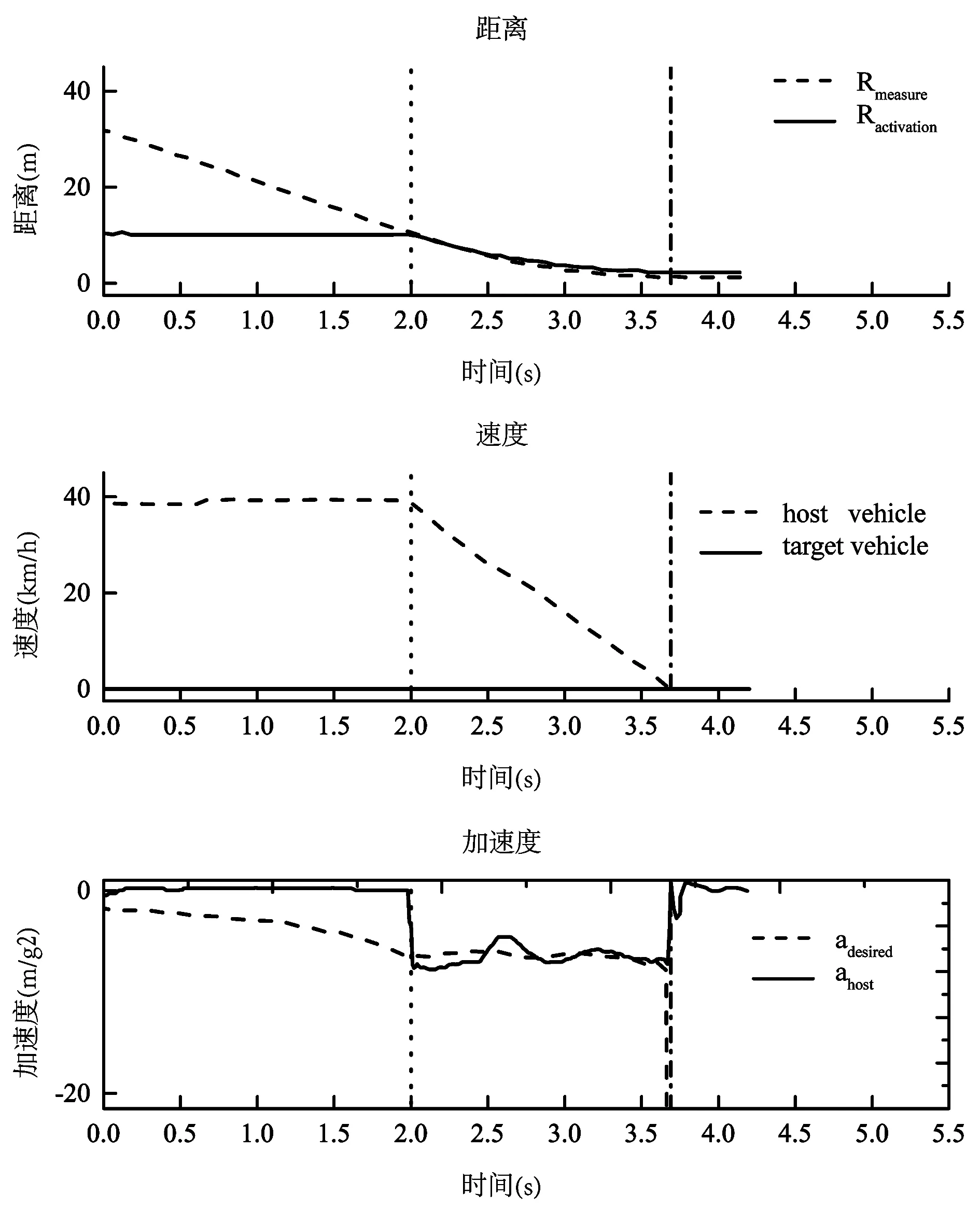
(a)5%倾斜,摩擦系数0.9 (b)5%倾斜,摩擦系数0.9
(c)平路,摩擦系数0.5 (d)平路,摩擦系数0.3图7 初始速度为40km/h的AEB系统
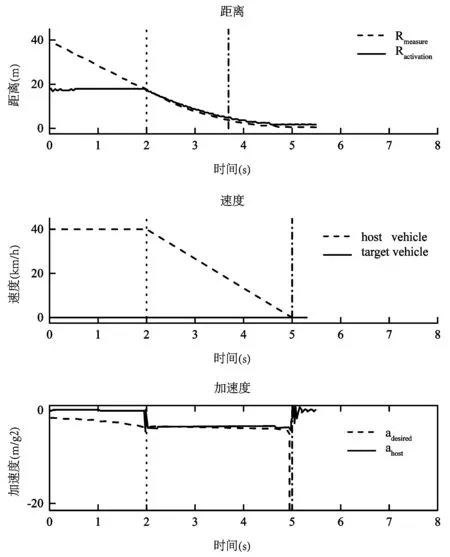
对于10%下降和0.5摩擦系数路面的CCRs情况,将所提出的AEB与图8中不考虑路况的AEB进行比较.在图8 (a)中,基于估算的道路坡度和系数,提出的AEB提前启动以避免碰撞,而传统的AEB在运行过程中发生碰撞,在图8 (b)中激活太晚.
期望的减速会变得非常大,在向下的湿滑路面上无法用同一制动单元来实现.
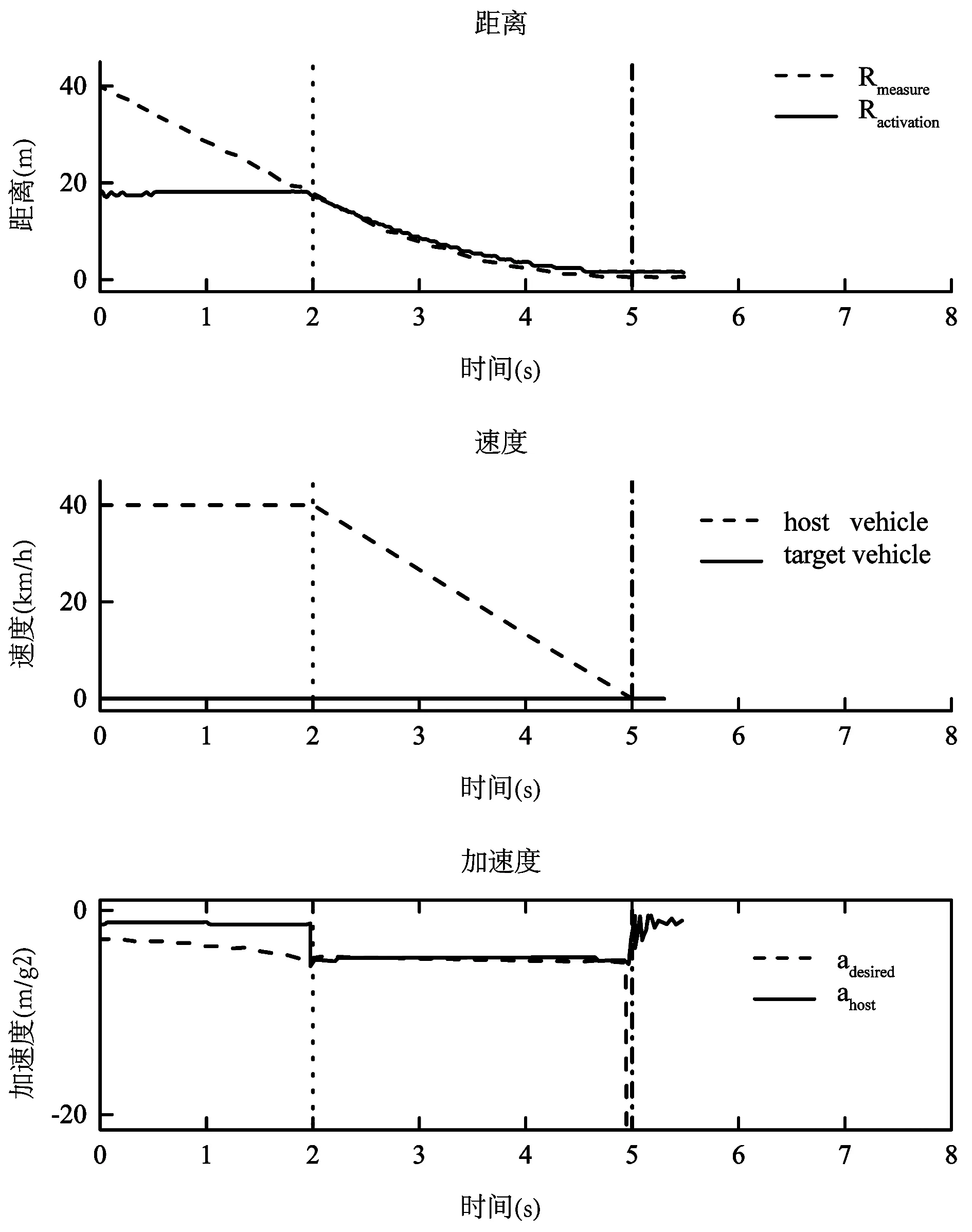
(a)文章所述算法 (b)不考虑道路参数的算法图8 在40 km/h的CCRs中,对10%下降和0.5摩擦系数下的AEB算法进行了比较
4实验验证
该系统的性能在斜坡路面上进行了现场实验验证.特别是对系统的激活控制进行了测试,主要是因为激活时间是斜坡路面AEB成功运行的关键.主机车辆的位置通过高分辨率RTKDGPS (Novatel公司,2015)精确测量,其中球面坐标使用横向Mercator (TM)投影变换(MOCT, Republic of KOREA, 2004)转换为正交坐标.引入虚拟车辆对象以避免真实的碰撞或事故,但虚拟对象数据需要作为AEB系统的输入.为了生成虚拟雷达信号,进行了雷达实验,将雷达信号表征为具有均值和方差的高斯误差模型.该虚拟雷达信号包括主机和目标车辆之间的相对距离和速度.现场测试的配置如图9所示,其中dSpace的microAutobox用于实现估计和AEB控制算法.利用ControlDesk软件对控制参数进行调整,并考虑试验车电子稳定控制(Electronic Stability control, ESC)的时滞,得到式(11)中的裕度参数.实验数据使用Vector CANCaseXL设备和CANoe软件进行采集.
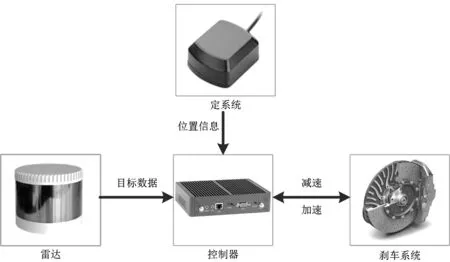
图9 现场测试的配置
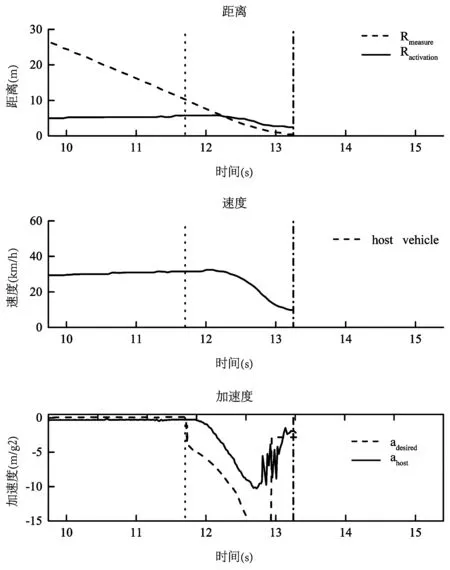
对7.5%坡度的干沥青路面进行了一系列AEB试验.静止目标车辆虚拟地位于主车辆的前方,主车辆以不同的初始速度和相对距离接近目标车辆.所提出的AEB系统的性能在表1中与传统的AEB进行了比较.如表1 (b)所示,所提出的AEB系统在所有情况下都避免了碰撞,停车距离也很好地控制在1 m附近.相反,不考虑路况的传统AEB系统在一些初始速度较高的情况下出现故障.图10绘制并比较了主机车辆的相对距离、速度和加速度.如图10 (a)和(b)所示,所提出的AEB有效激活,使主车减速,避免碰撞.然而,传统的自动制动系统由于没有考虑下坡信息及其加速度分量,制动时间不够早,期望的减速度很大.
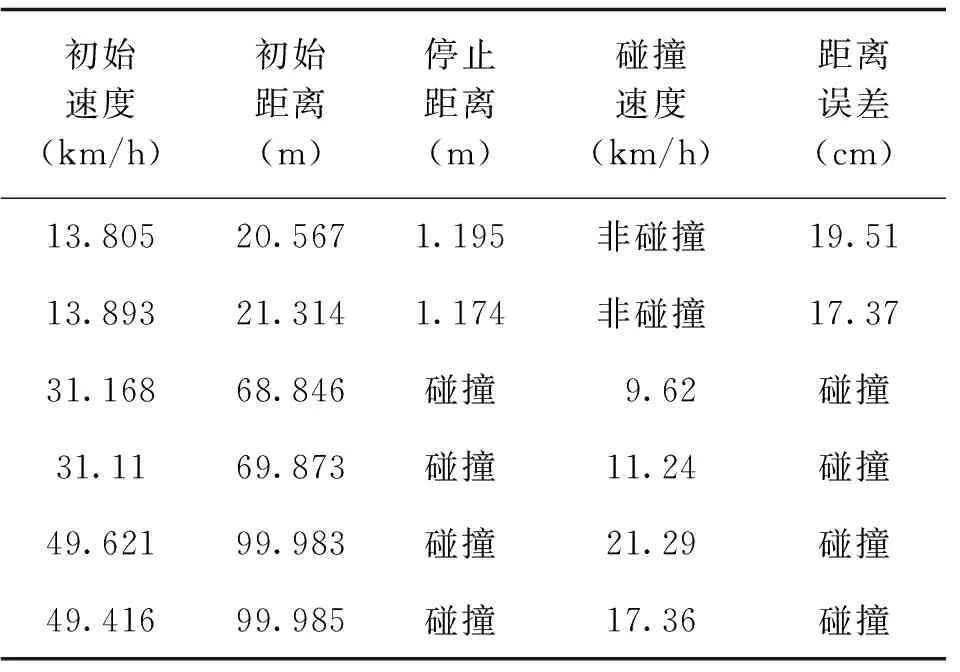
表1 7.5%倾斜道路上的CCRs试验结果.
(b) 文章所述AEB系统
(a)CCRs 30km/h,7.5%倾斜不考虑道路参数
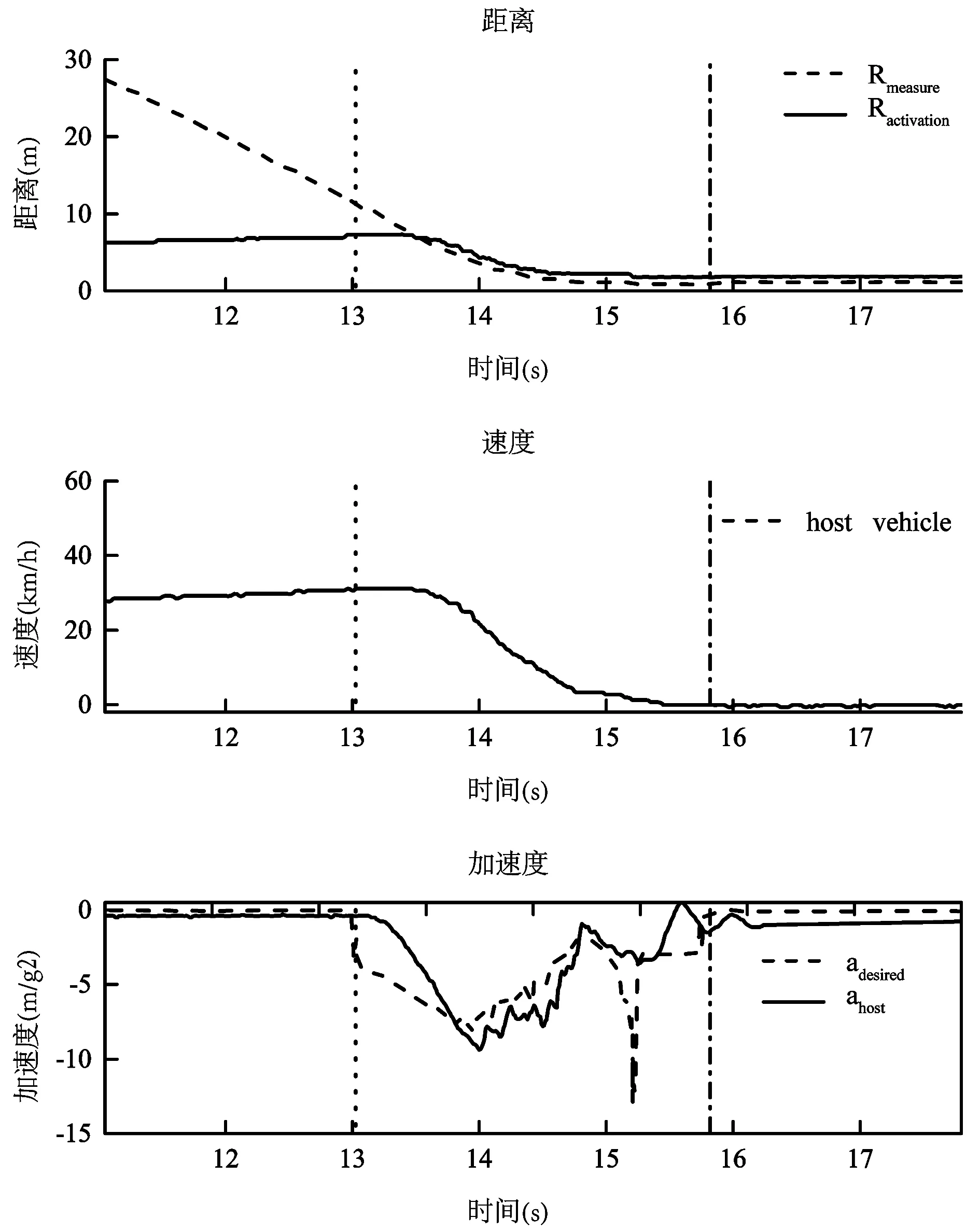
(b)文章所述CCRs 30km/h,7.5%倾斜

(c)CCRs 50km/h,7.5%倾斜不考虑道路参数

(d)文章所述CCRs 50km/h,7.5%倾斜
5结论
文章提出了一种改进的考虑路面坡度和摩擦系数的自动紧急制动系统,设计了带有前馈项的减速控制器,在实际路面条件下获得了最大可能的减速度,并利用余量参数确定了最小制动距离.经过大量的仿真验证和实验验证,表明该系统在不同速度下在斜坡路面上表现出了良好的避碰性能.
