海底管道机器人定位信号传播特性实验研究
2022-04-20李孟杰
李孟杰
中石化石油工程建设有限公司(北京 100020)
0 引言
海洋油气通过海底管道集输,具有经济、高效的特点,但是运行一段时间后,管道内可能会出现腐蚀、结垢等问题,另外由于地基变化、海流冲淘、意外机械损伤等原因,管道也会发生变形或内径变化,管道机器人在清管或检测[1]工作过程中可能出现卡堵[2],解堵[3]、管道缺陷的评估和修复等工作都需要对管道机器人在管道内的位置进行精确定位。
低频电磁波由于其频率较低,信号能够穿透海水、泥土甚至金属管道,得到了广泛的应用[4],也可应用于管道内机器人的示踪定位[5]。在国内,哈尔滨工业大学[6]、沈阳工业大学[7]、清华大学[8-10]等高校开展了相关的定位工作,在国际上也有较为成熟的产品。但这些研究和应用主要集中在单层输油管道上,针对双层金属管道低频电磁定位的报道比较少见。
低频电磁定位方法能否应用于双层金属管道中,首先要解决的是其能否穿透对电磁信号具有强屏蔽特性的双层铁磁管道;其次在确定能穿透的情况下,确定信号的强度以及能够辨识的穿透距离[11]。本文设计了低频电磁信号发射机和接收机,并对DN150 壁厚14 mm 双层金属管道、海水、空气等3 种介质条件下进行了穿透性能实验。结果表明,设计的低频磁信号发射机发射的信号能够穿透双层管道,具有较强的辨识度,有效接收距离可达6.4 m,可通过低频电磁信号幅值的大小实现对管道机器人的定位。
1 双层海底管道机器人低频电磁定位方法
低频电磁信号由于其频率较低的特点,信号可穿透铁磁管道等导磁导电介质,因此,可通过低频电磁信号对双层金属管道内机器人进行定位,系统由安装在管道内机器人上的发射器和管道外的接收器组成,如图1所示。
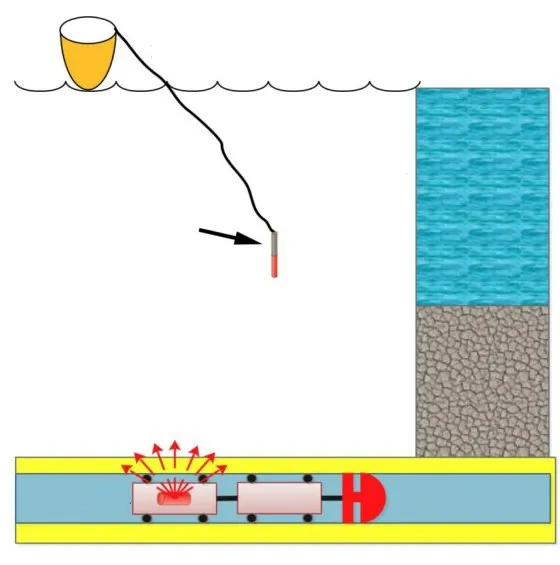
图1 电磁定位示意图
低频电磁信号通过发射器发射线圈产生低频交变磁场来发射信号,如图2所示。

图2 螺线管发射天线及坐标系
在直角坐标系下,当接收天线与地面垂直时,其测量磁感应强度x 方向的分量Bx;当接收天线与管道平行时,其测量磁感应强度z方向的分量Bz,螺线管在x和z方向的磁感应强度表达式见式(1)[10]。
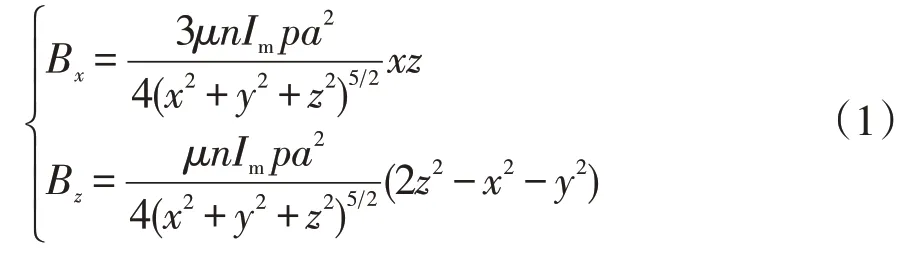
式中:Bx为磁感应强度x方向的分量,T;Bz为磁感应强度z 方向的分量,T;μ 为环境的磁导率,H/m;n 为线圈的匝数;Im为线圈通电电流值,A;p为线圈的长度,m;a为螺线管线圈半径,m;x,y,z 为接收线圈的坐标值,m。
根据式(1),对发射线圈的磁感应强度进行了数值分析计算,磁感应强度在x方向的绝对值|Bx|分布示意如图3所示。

图3 |Bx|随距离z变化曲线
由图3仿真分布计算可知,磁感应强度在x方向上的分量|Bx|呈双峰分布,当接收天线位于发射天线正上方时,信号强度最小。
在定位过程中,接收天线垂直于发射天线,两者相对移动,当信号位于双峰极小值处接收天线所在位置即为管道内发射天线所在位置,即实现管道机器人定位。
2 低频电磁信号发射器与接收器
由于铁磁管道对磁场的较强屏蔽性,且目前文献报道中定位技术主要针对单层管道,为了验证该定位方法能否应用于双层输油管道,本文设计了基于低频电磁信号的双层输油管道的实验装置。实验装置由低频电磁信号发射器、接收耦合天线以及接收信号处理器等几部分组成(图4)。
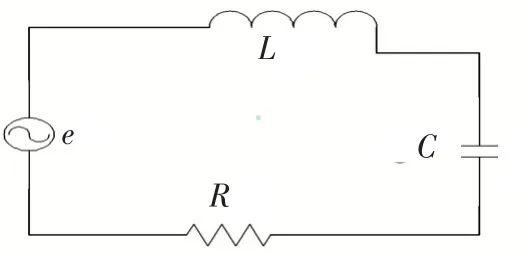
图4 发射线圈谐振等效电路
2.1 低频电磁信号发射器
低频电磁发射器由单片机产生23 Hz的信号经由功率放大电路驱动发射线圈,从而产生23 Hz 低频电磁信号。为了提高发射磁感应强度,发射器通过LC串联谐振,提高发射线圈上的电压。
发射线圈谐振电路的频率可由式(2)计算:

式中:f 为谐振频率,Hz;L 为线圈电感值,H;C 为谐振电容,F。
谐振线圈的品质因数Q值为:

式中:Q 为谐振线圈的品质因数;R 为线圈直流电阻,Ω。
为提高谐振线圈上的电压,需尽可能提高发射线圈的Q值,根据式(3),应该减少发射线圈的内阻,因此在发射线圈的绕制过程中应尽可能采用较粗的漆包线。
发射线圈如图5 所示,低频电磁信号发射器的主要参数见表1。
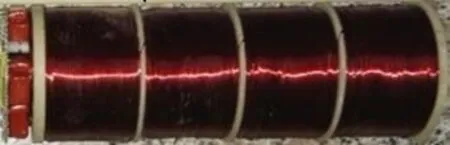
图5 发射线圈
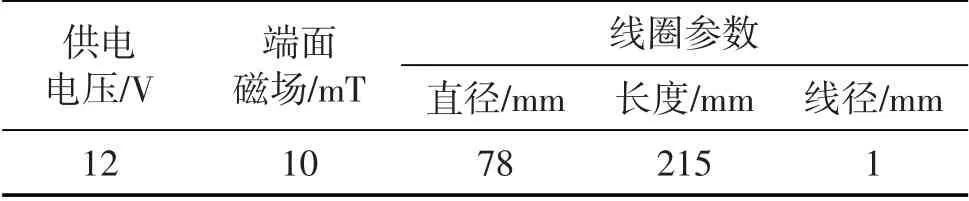
表1 低频电磁发射器主要参数
2.2 低频电磁信号接收器
根据法拉第电磁感应定律,变化的磁场产生变化的电场,本设计采用多匝线圈作为接收天线。接收天线接收到的磁场示意图如图6所示。
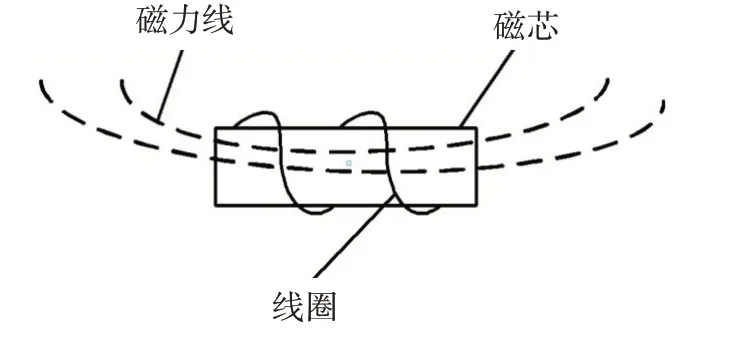
图6 接收天线在检测磁场中示意图
由图6 可知,线圈检测穿过磁芯的磁通量的变化,从而检测磁场信号;从图6 也可看出,穿过线圈磁芯的磁通量与磁芯铁芯的体积、形状密切相关,为了更好地减少磁芯铁芯长度对测量磁通的平均值带来的影响,在本设计中,尽可能地减小磁芯的长度,以更准确地测量线圈所在点的磁感应强度。接收线圈的等效电路如图7所示。
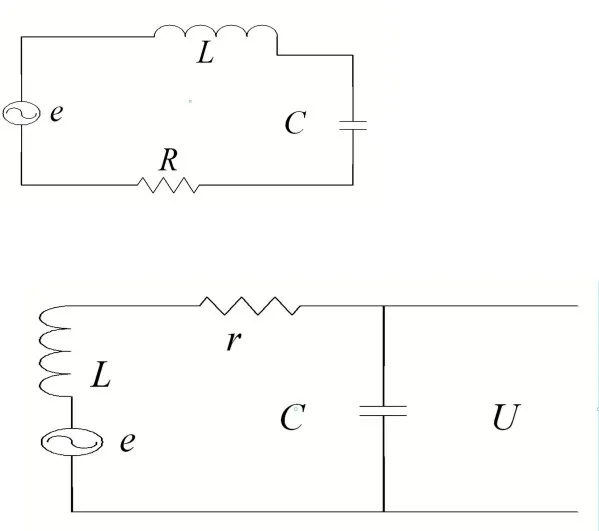
图7 接收线圈谐振等效电路
假设线圈的匝数为n,则接收线圈的感应电动势ε可由式(4)计算。

由式(4)可知,相同尺寸、相同磁感应强度条件下,选用的漆包线直径越小,匝数越多,感应出的电动势越大,接收天线输出信号越强。实际接收线圈的主要参数见表2。

表2 接收线圈主要参数
3 实验研究
管道机器人工作的环境是双层海底石油管道,因此,其真实的工作环境在实验室中较难搭建,本实验研究低频地磁信号在双层金属管道、海水以及空气等不同介质中强度的衰减规律。
低频电磁发射器和接收器的实物如图8 所示,接收器可直接显示接收信号的幅值、相位等信息。
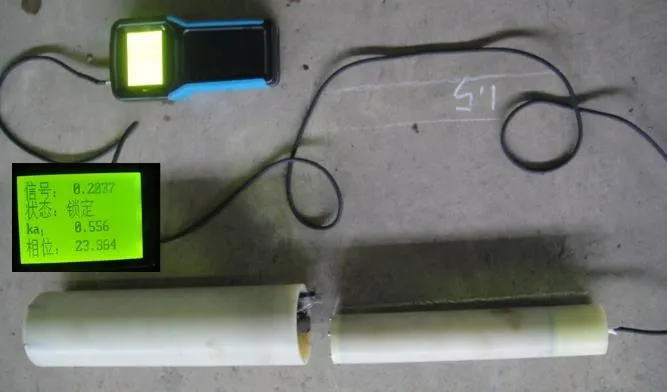
图8 发射器和接收器实物图
3.1 实验方法
实验过程中,发射器与接收器轴向平行,改变两者的平行距离;发射器位置固定,改变接收器在y方向上的位置,并记录信号强度。
3.2 不同介质衰减特性实验
在本次实验中,针对DN150 双层管道(壁厚14 mm)、海水、空气等3 种介质做了传输实验,实验现场如图9所示。

图9 实验现场照片
每组实验中,发射器功率保持不变且接收器参数完全相同,保持发射器位置不变,位于坐标原点;接收器x、z坐标为0不变,改变接收器的相对位置y;当接收器输出稳定后,记录接收器输出的电压以及位置y。实验数据见表3~表5。

表3 DN150双层金属管道接收信号

表5 空气接收信号

表4 海水接收信号
将数据绘制成曲线如图10 所示。由图10 可知,发射器处于双层金属管道内信号衰减最快,海水中次之,空气中衰减最少。
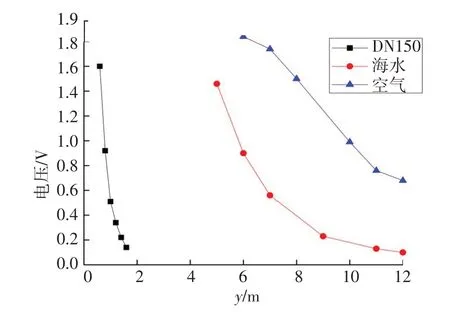
图10 3种介质的信号曲线
根据式(1),在本试验中由于x=0,y=0,仅仅改变z,Bz退化为式(5):

通过接收传感器及接收电路信号处理,磁感应强度Bz转化为电压信号,结合式(1),接收器的输出电压u和距离z之间的关系见式(6):

式中:u为输出电压,V;A为等效折算系数,V/m3。
等效折算系数A与介质、接收器、发射器参数相关,若介质、发射器参数及接收器所在位置的磁感应强度确定,其为常数。对3种介质(DN150、海水、空气)的传输数据进行拟合,A 系数拟合结果依次为:0.5、228.2、982.4 V/m3。由拟合结果可知,相对于空气中的传播,当发射器置于DN150 双层管道内,信号强度约为空气中的1/1 965;海水中的信号强度约为空气中的1/5。在实际定位过程中,接收器靠近管道,海水的影响可以忽略,因此,影响信号传输距离的是双层金属管道。
在空气介质中,增大发射器的功率后,实际检测距离可达80 m;通过参数拟合等效系数A折算,穿透双层管道后的可检测距离约为6.4 m,可以用于管道机器人的定位。
4 结束语
为了验证低频电磁信号能否应用于双层海底输油管道,设计了低频电磁定位发射器与接收器,并针对双层金属管道、海水、空气等3种介质开展了传输实验,并进行了参数拟合等效折算。当空气中能传播80 m时,信号穿透双层金属管道后有效传播距离可达6.4 m,低频电磁信号可应用于海底双层输油管道内管道机器人的定位。
