气动人工肌肉外骨骼机器人位置跟踪控制
2022-04-20赵智睿肖计春刘明芳郝丽娜
赵智睿, 张 航, 肖计春, 刘明芳, 李 醒, 郝丽娜
(1.东北大学 机械工程及自动化学院, 辽宁 沈阳 110819;2.东北大学 流程工业综合自动化国家重点实验室, 辽宁 沈阳 110819;3.东莞理工大学 电子工程与智能化学院, 广东 东莞 523808)
引言
外骨骼机器人作为一种人机结合的可穿戴装备,体现了控制工程、生物工程、机电工程以及人工智能领域中诸多技术的高度集成[1]。近年来,外骨骼机器人在生产生活以及医疗康复等领域具有诸多应用前景:一方面,外骨骼机器人可以辅助健康的穿戴增强其耐力和负载能力;另一方面,外骨骼机器人可以辅助具有运动障碍的患者和老年人进行有针对性的康复训练以及恢复其部分运动功能[2-3]。传统的外骨骼机器大多采用电机、液压等驱动方式,可以为穿戴者提供较大的辅助力或力矩[1-3]。为了减轻本体质量,降低使用风险,一些机器人选择以气动人工肌肉(Pneumatic Artificial Muscle,PAM)作为驱动器[4-5]。PAM作为一种直线型气动元件,由外部的刚性编织网和内部的柔性橡胶套管组成,具有结构简单、自重轻、输出力/自重比与生物肌肉相似、柔顺性高等优点[6-8]。因此,使用PAM作为外骨骼机器人驱动器可以有效降低外骨骼机器人的本体质量,提高关节柔顺性,减小了因意外而对穿戴者造成伤害的风险性。
在控制方面,PAM的力学模型较为复杂。不同于电机和液压驱动系统,决定PAM输出力的主要因素(即内部充气压力、横截面积与收缩率)之间符合非线性关系,各参数之间存在耦合[7]。其内部橡胶套管和外部编织网之间的摩擦以及橡胶材料固有的周期性松弛特性则进一步增加了PAM的控制难度[8]。而对于外骨骼系统而言,使用PAM则意味着对外骨骼机器人动力学模型引入更多未知的扰动项和未建模项,增加了控制器对外骨骼机器人实现位置跟踪的难度。此外,考虑外骨骼机器人系统的结构参数存在一定范围的摄动,因此依赖于对实验数据进行在线或离线辨识获得的动力学模型往往结构复杂,参数的精度有限[9-11]。
针对上述问题设计了一种双层控制结构,用于实现外骨骼机器人的关节位置跟踪。其上层控制器以动力学模型为基础,引入了自适应律和滑模控制器降低了控制器受参数不准确和未知扰动的影响。底层控制器则利用无模型方式建立了气动肌肉输出力闭环系统,实现了底层控制与上层控制的协同一致。最后,设计了仿真实验和穿戴实验,对上述方法进行验证。
1 上层控制器设计
为实现外骨骼机器人的关节位置跟踪控制,依据动力学模型设计了上层控制器计算关节驱动力矩。上肢外骨骼机器人的动力学模型见式(1)[9]:
(1)
式中,τδ—— 外部干扰力矩
τh—— 穿戴者对外骨骼关节处施加的相互作用力矩
G—— 外骨骼机器人的重力矩
u—— 控制律
τd—— 包含系统的未建模项以及扰动项
对于式(1),M0和C0为估计的动力学参数。由于该值与真实参数之间存在偏差,即存在ΔM和ΔC。该式可进一步整理为式(2):
(M0+ΔM)-1u
(2)
e1=x1-x1d
(3)
(4)

γ—— 虚拟控制量
e2的导数为:
(5)
(6)
其导数为:
(7)

(8)
其导数为:
(9)

(10)
对于未知外部干扰项τδ,τh和G均可以通过实际测量后进行补偿;针对未知项τd,相关研究表明,对于上肢外骨骼机器人系统,存在一个正数Γ≥0,使其大于|τd|[12]。因此,利用一阶滑模控制器以提高系统的鲁棒性[13]。最终,上层控制器的控制律见式(11)。
(11)
设s=e2,将式(11)重新带入式(9)中,可整理为:
(12)
当s>0,式(12)可改写为:
(13)
当s<0,式(12)可改写为:
(14)
因此,所设计的控制器可以满足外骨骼机器人系统的稳定性要求。
2 底层控制器设计
图1a为一种基于模型的典型控制结构。其中,气动人工肌肉的力学模型主要包含2种:三单元模型(唯象模型)和准静态模型(物理模型)[14-16]。然而,2种模型结构都较为复杂,参数较多[17]。本研究则利用无模型方法直接对外骨骼机器人的关节力矩设计了闭环控制器,在外骨骼机器人的关节处安置了电子测力计,测量并计算实际的关节驱动力矩值。在此基础上,设计了PI型反馈控制器,使用高速开关阀调整气动人工肌肉的充气和放气状态控制气动肌肉的输出力[18]。如图1b所示,通过构建力矩闭环,提供足够的关节驱动力矩达到外骨骼机器人的期望力矩。执行器的控制律见式(15),其中fPWM为高速开关阀的动作频率。
(15)
式中,τd和τ代表期望和实际的关节力矩,P和I为比例系数和积分系数。

图1 底层控制器设计方案Fig.1 Scheme of PAM control
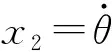
关节力矩的测量方案如图2所示,其中,拉伸弹簧的一端固定于外骨骼机器人的前臂,另一端通过连接环固定于电子测力计。拉伸弹簧仅用于补偿关节旋转后造成的位移,而定滑轮则用于约束拉伸弹簧的移动方向。电子测力计测量得到的弹簧拉伸力与力臂相乘后可视为关节力矩。为方便设计和制备,将力反馈装置的安装距离设为l1=l2=l。电子测力计的初始值为F0,关节驱动力矩的计算法则见式(16):
(16)
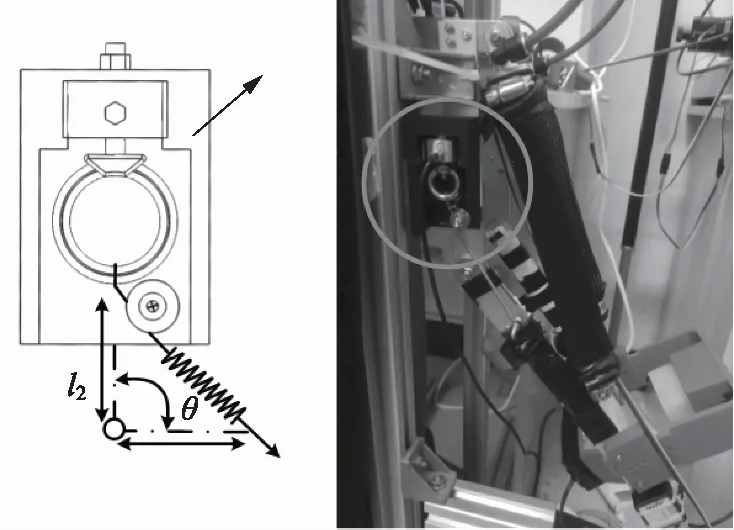
图2 关节力矩测量方案Fig.2 Scheme of joint torque measurement
由于系统为并联结构,外骨骼机器人的关节刚度由气动肌肉的刚度与弹簧刚度共同决定。因此,为了降低弹簧对系统动力学性能的影响,其刚度应远低于气动肌肉系统的初始刚度值(6500~8000 N/m[19])。在制作过程中,考虑到弹簧振动对测量结果的影响,对比了2种不同刚度的弹簧并进行如下测试:实验对象为2根相同长度(70 mm),刚度分别为180 N/m 和 300 N/m的拉伸弹簧;实验平台为肘关节外骨骼机器人。该机器人在肘关节处存在1个自由度,其大臂端和小臂端由2根收缩型PAM相连(长度280 mm,直径35 mm,单根最大输出力100 N)。使用的电子测力计量程为30 N(蚌埠传感器系统工程有限公司,JLBM-1-3 kg),动态测量误差为0.01,经测量安装位置的最大等效力臂为50 mm。期望的关节力矩见式(17):
(17)
底层控制器取P为2000,I为80,关节驱动力矩跟踪结果见图3。实验结果表明,采用300 N/m和180 N/m收缩弹簧的设计方案其底层控制器的均方根误差分别为0.020 N·m和0.042 N·m。均方根误差的计算见式(18),其中d代表期望值。因此,采用300 N/m收缩弹簧的方案更接近传感器的测量精度0.015 N·m(30×0.05×0.01),可以满足控制要求:
(18)

图3 底层控制器力矩跟踪测试Fig.3 Results of torque feedback loop
3 仿真与实验
3.1 外骨骼运动仿真实验
为验证本研究所提控制算法的有效性,利用MATLAB 2016b设计了仿真实验。参考轨迹设定为0.6 sin(0.2πt)。动力学模型简化为式(19),其中mLl1sin(θ)视为仿真系统的未建模项以及扰动项。模型的相关参数见表1,控制器的参数见表2。控制器中使用的动力学参数与仿真系统的动力学参数之间均存在偏差。将PID控制器作为对比的控制方案(PID整定可根据Ziegler-Nichols法,首先将积分、微分系数置0,然后调节比例系数,再根据经验和结合实际情况适当放缩微分和积分系数,最终取比例系数为25,积分系数为10,微分系数为12.5),仿真结果见图4。其结果表明,在相同外部干扰下,使用本研究所提控制器,其均方根误差为6.68e-5 rad,最大误差为9.8e-3 rad,小于PID控制器的均方根误差(2.4e-4 rad)和最大误差(1.1e-2 rad)。因此,所述控制器在外部干扰下具有更好的跟踪效果:
(19)
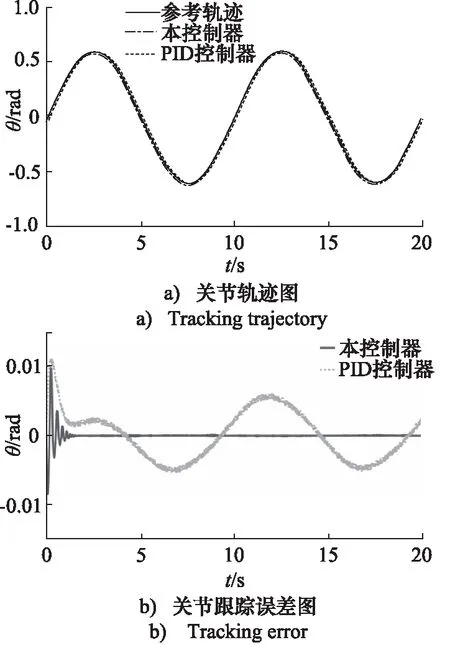
图4 位置跟踪仿真Fig.4 Tracking performance of simulation
3.2 外骨骼穿戴实验
为进一步验证所设计的外骨骼机器人控制系统及控制算法的性能,设计并完成了穿戴实验。选取1名身高为180 cm,质量75 kg,年龄为25岁的健康成年男性作为实验对象,穿戴外骨骼机器人进行肘关节屈曲/伸展动作位置跟踪控制。所设计的实验分为两组,第一组采用PID位置跟踪控制器,第二组采用本研究设计的位置跟踪控制器。
如图5所示,控制系统分为上层的模型参考自适应控制器和底层的关节力矩控制器。上层控制器(即上位机)根据惯性传感器、人机交互力传感器反馈的外骨骼机器人的关节角度值和相互作用力矩计算外骨骼机器人的关节输出力矩。底层控制器(即Arduino和驱动电路板)将得到的关节输出力矩作为期望值,经PI算法实时调整实际关节输出力矩。外骨骼机器人的关节运动参考轨迹由上位机指定,表达式见式(20)。该轨迹保证了起始位置为0 rad,运动周期为6 s,幅值为0.6 rad。
(20)

图5 实验设备Fig.5 Experimental setups
表1 仿真系统动力学模型参数表Tab.1 Parameters of dynamic model
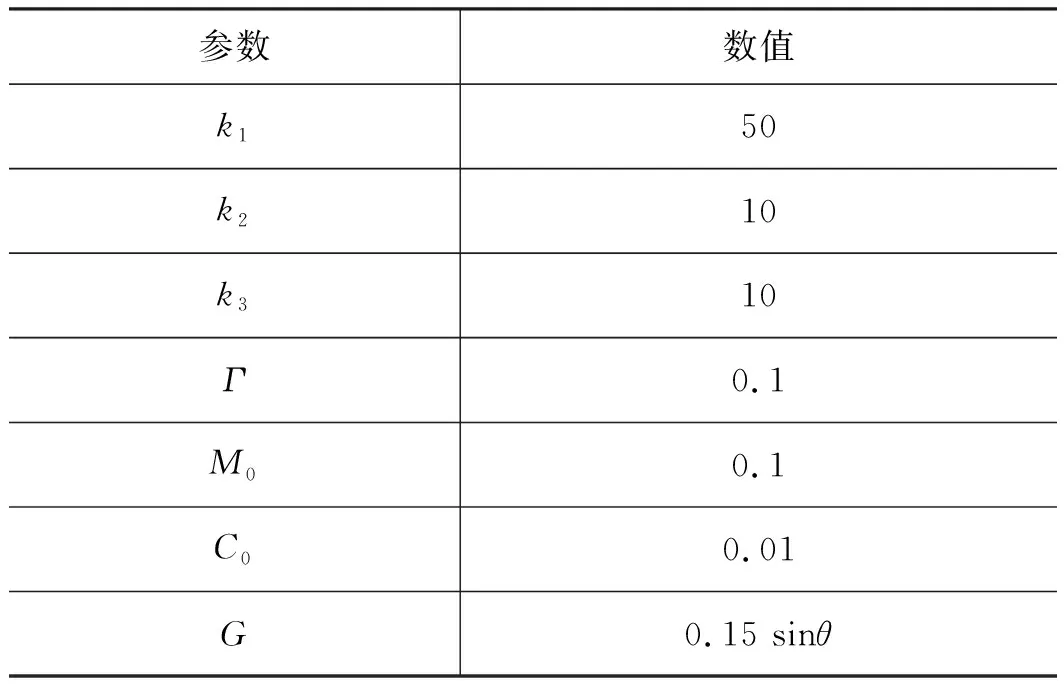
表2 仿真系统控制器参数表Tab.2 Parameters of proposed controller
图6为实验过程中的人机接触力测量值。两组实验的接触力曲线趋势一致且最大值相似(4.21 N和4.48 N)。因此,两组实验可认为是在近似相同的条件下采用不同的控制器进行同样的跟踪任务。图7为两种控制器的跟踪效果,其中PID位置跟踪控制器的设计过程见相关文献[20]。经实验验证,本研究提出的控制器的控制效果优于PID控制器,其中PID控制器的最大跟踪误差和均方根误差分别为0.831 rad和0.036 rad,而本研究提出的控制器则为0.514 rad和 0.024 rad。 因此,与PID位置控制器相比,本研究所提控制方法更适合于完成外骨骼机器人的关节位置跟踪任务。
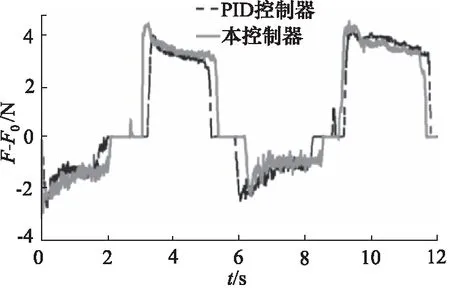
图6 人机接触力Fig.6 Human-robot interactive force
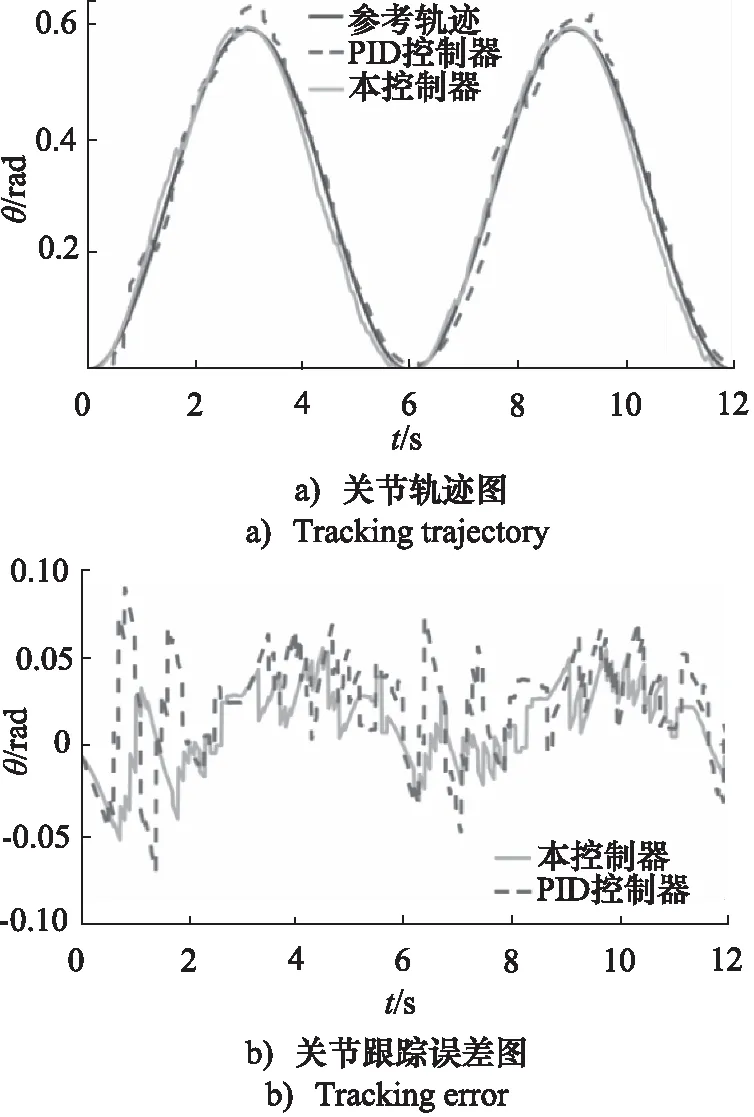
图7 外骨骼穿戴实验Fig.7 Results of wearable experiment
4 结论
(1) 设计了基于动力学模型的外骨骼机器人关节位置控制器,并结合了自适应算法和滑模控制方法增加了控制器的鲁棒性。仿真实验和穿戴实验结果表明,所提出的控制方法实现了气动人工肌肉外骨骼机器人的关节位置跟踪任务。
(2) 针对以气动人工肌肉作为外骨骼关节驱动器的机器人系统,设计了基于PI控制方法的底层力矩控制器,避免了气动人工肌肉的复杂建模过程。
