倾斜摄影测量在三维地形图绘制中的应用
2022-04-20李春雨郁鹏飞
李春雨郁鹏飞
(1.华北理工大学矿业工程学院,河北 唐山 063210;2.中国地质大学,北京 100000)
引言
地形图广泛应用在人们生产生活中。鉴于传统测量形式单一、数字化水平低的现状,无人机倾斜摄影测量以作业灵活、低成本、效率高的优势逐渐走进人们的视野[1]。国内外学者对此也有广泛的关注,VCasella等[2]提出了针对地形起伏较大区域的倾斜摄影测量建模方案;Yanbiao Sun等[3]为了优化三角测量,提出了光束法平差提高测量精度;Taowen Sun[4]使用BIM模型和无人机建立三维模型应用于房屋测量;Kristian等[6]以地形露头倾斜影像为基础来构建格陵兰岛三维模型。蔡嘉伦等[7]针对国内倾斜摄影测量精度较低的问题,采用递进布设方式进行量化分析;李祎峰等[8]基于倾斜测量的地理空间信息和应用平台系统开始出现,该系统软件具有“影像三维测量”功能,为公共安全及应急指挥、城市规划、通讯等领域做出了较大贡献。张晶晶等[9]将倾斜摄影测量技术应用于地籍三维测量中,描述不同影像空三加密方法。
1 研究区概况与数据源
1.1 研究区概况
实验区域位于华北理工大学D区教学楼,面积约为0.15km2。主要地物有楼房、道路和少许绿化,属温带季风性气候,地势平坦,地物特征明显,无明显遮挡物。拍摄时间为4月,当天天气晴朗,适合作为拍摄场地。
1.2 数据源
本次实验共采集了19个像控点,像控点分布在道路标线处和明显地物的边角,覆盖了整个航拍区域,布设点如图1所示。像控点大地坐标数据如表1所示。无人机搭载相机焦距为8.8mm,设置航拍高度100m,相机倾角为60°,航向、旁向重叠率均为80%。拍摄18条航带,获得倾斜影像1235张。

表1 实验区像控点坐标数据

图1 实验区区像控点布设
2 三维模型建立
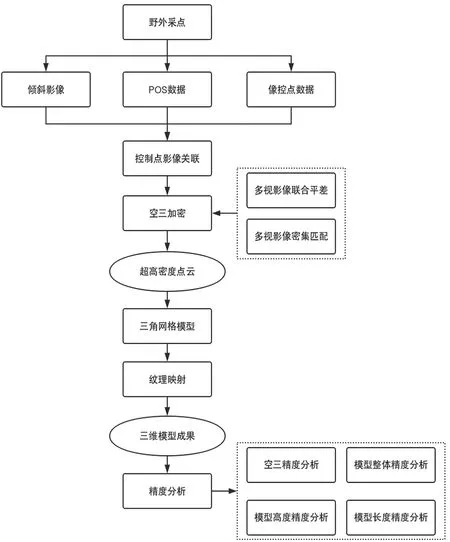
图2 模型建立流程图
3 三维地形图成果分析
3.1 成果展示
本次实验的建模区域为华北理工大学D区教学楼,具体成果如图3。图3b为点云图,包括控制点与自动连接点。图3c为空三计算后构成的不规则三角网,称之为TIN模型,能在表示不同地物时达到较好的效果,并能表示地形起伏复杂的区域。
3.2 精度评定
空中三角测量是倾斜影像数据处理的关键一步,空三精度决定了后面建模的质量。因此,对空三完成后的报告进行分析评价可直观感受模型的品质。本文以中误差作为衡量模型精度质量评价标准。
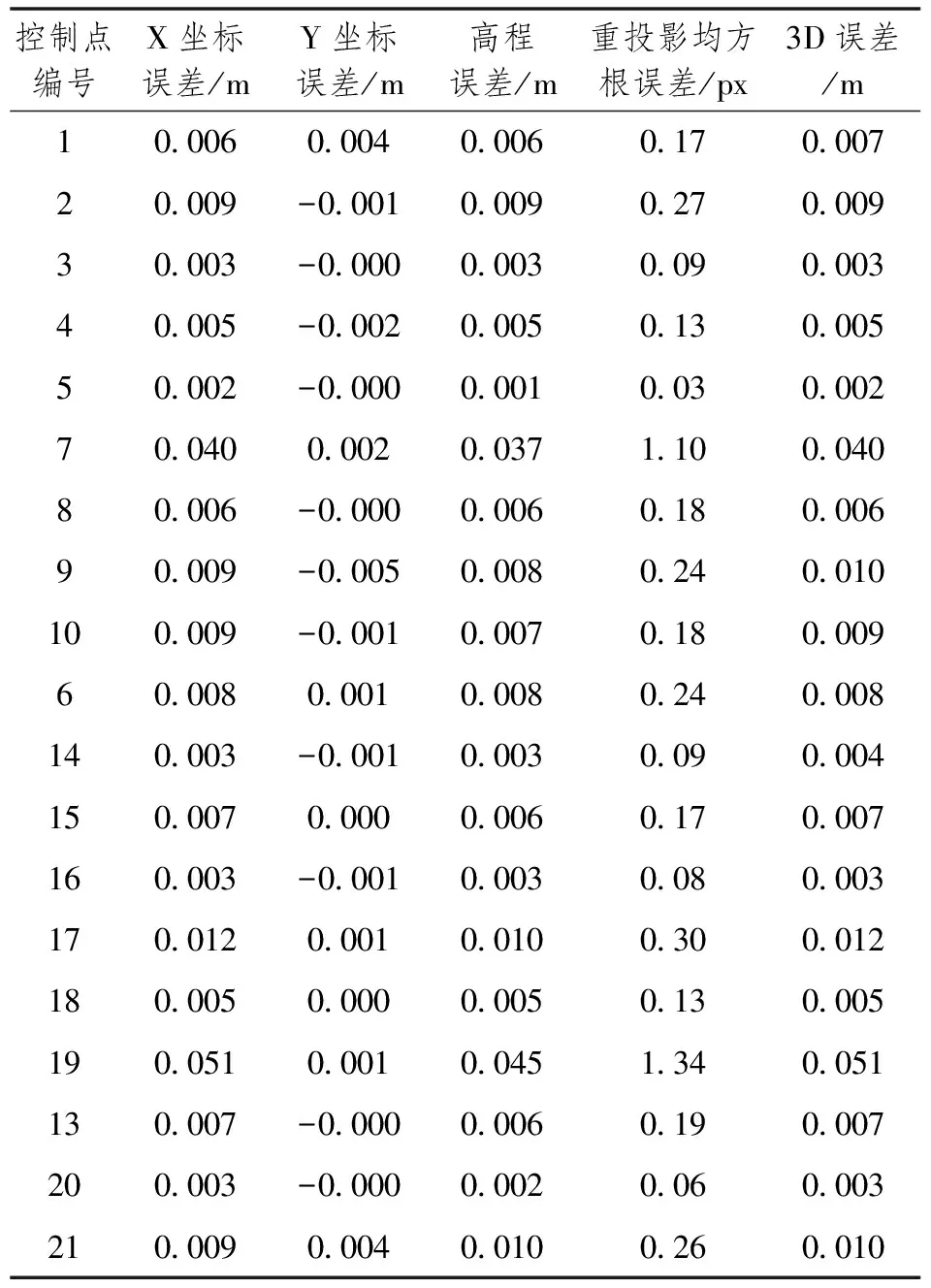
表2 实验区空三精度
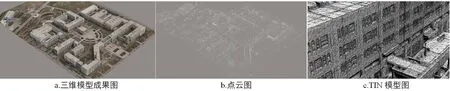
图3 三维模型成果
由表2可知,中误差中,X坐标为0.016m,最小为0.002m,最大值为0.016m;Y坐标为0.002m,最小为0.00m,最大误差为0.005m;平面和高程中误差分别为0.016和0.015m;重投影和3D误差分别为0.43px和0.016m。中误差各值皆小于1个像素,且分辨率范围0.026~0.039m,本次空三加密过程良好。
3.2.1 模型整体精度评价
将野外实测控制点坐标与三维模型量测的对应点坐标求取中误差,评定三维模型的平面中误差和高程中误差,其中,1∶500成图比例尺外业和非外业平面精度分别为0.3m和0.5m,1∶1000、1∶2000、1∶5000精度分别为0.8m、1.4m、3.5m;表3为地形精度规范,表4为模型检查点坐标。
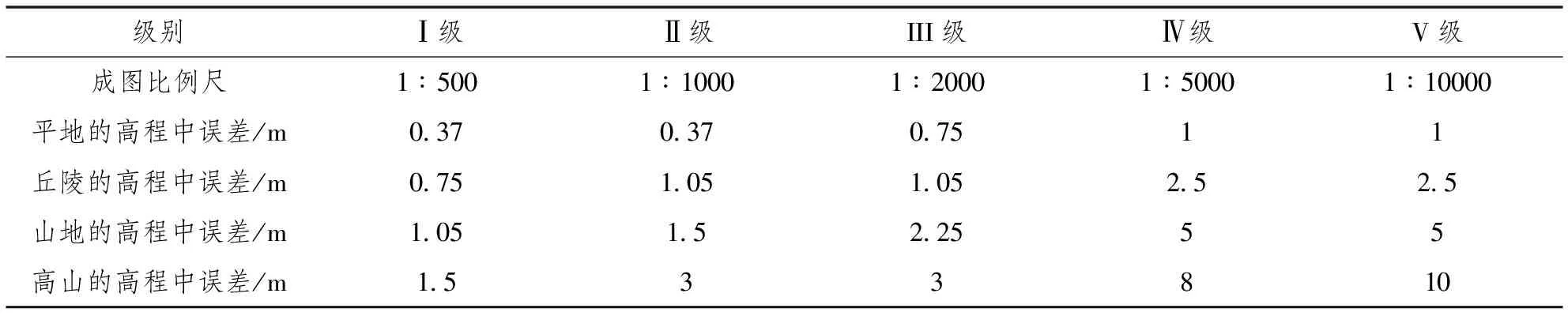
表3 地形精度规范
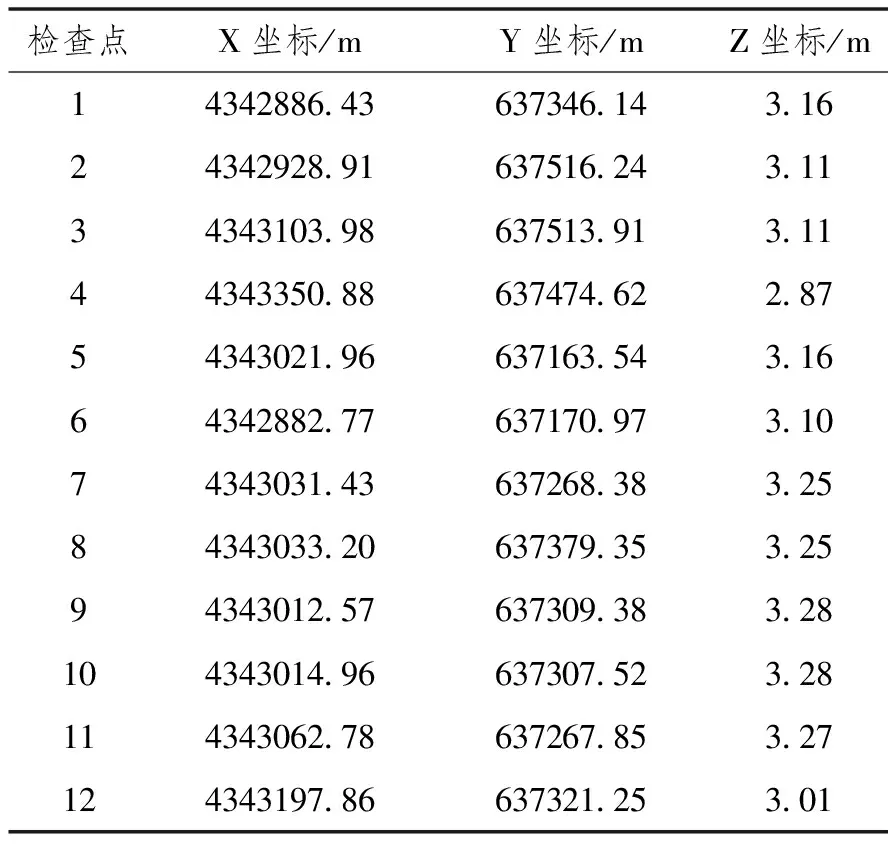
表4 模型上检查点坐标
在生成的三维模型上量测12个检查点的坐标,X方向中误差为0.052m,Y方向为0.038m,平面为0.064m,高程中误差为0.026m。平面中误差小于0.5m,高程中误差小于0.37m,因此生成的三维模型精度达到1∶500比例尺测图精度。
3.2.2 模型高度精度评价
为了避免生成的三维模型与真实地物差距偏大,因此对模型中的地物高度和实际测量高度进行精度评定。高度精度规范中,1∶500外业和非外业调绘分别为0.5m和0.8m;1∶1000和1∶2000精度为1m和2m。模型高度精度分析方法是将模型量测值与实测采集到的地物高度真值求高差并计算中误差,得到模型高度精度。地物高度用高精度全站仪测量记录,选点多为D区建筑物,主要为楼房高度,窗沿距离地面的高度,低矮房屋高度等。表5为模型高度统计表。

表5 模型高度统计表
3.2.3 模型长度精度评价
本文采用模型量测距离与RTK采集固定点坐标计算出的2点间的长度,求差值并获得中误差。主要选取了街道宽度、楼房边长、草坪边长等几类地物,表6为边长长度统计表。
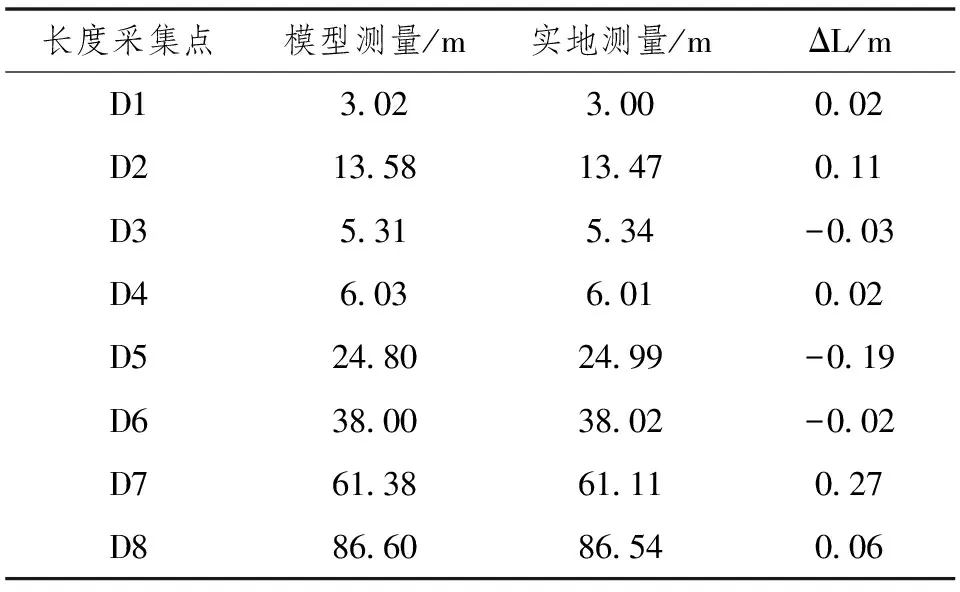
表6 模型长度统计表
本次模型长度中误差为0.173m,最大误差为0.27m,最小误差为0.02m。
4 结论
与传统建模方法相比,使用倾斜摄影测量技术建模的时间被大大缩减,均达到《三维地理信息模型数据产品规范》Ⅰ级标准,可以投入实际应用中,对将实景三维地形图应用到人们日常生活中有一定的推动作用。
