投本机械臂的设计及关键部件分析
2022-04-20闫云东楚翼蒋欢欢
闫云东 楚翼 蒋欢欢
摘要:将流水线上末端送来的书芯等转移到圆盘包本机,这是目前一般印刷厂的工艺流程中存在的人工作业环节之一。向圆盘包本机投放书芯的高频作业易使工人产生疲劳并可能出现投本反向、错位等问题,造成生产成本的上升。频繁的重复操作正是自动机械臂应当出现的工位,现在应用三维建模以及软件仿真验证来实现机械臂的设计工作成为主流设计方法。基于此,对投本机械臂的设计及关键部件分析进行研究,仅供参考。
关键词:自动机械臂;设计;分析
引言
一般而言,工程机械臂是多输入输出、高非线性、强耦合的多体系统。机械臂基于自身动力完成多种作业需求,可用于装备制造、焊接检测、重型装配等生产环节,在矿山机械、智慧交通、航空航天、军工制造等诸多领域有着广泛应用。现代化工业技术飞速发展,社会生产规模大、自动化程度高,工程机械在整个生产建设中发挥着越来越重要的作用。机械臂是各种工程机械设施的主要组成部件之一,其动力学特性决定了工程机械整机的性能发挥。工程机械臂作业工况在一般情形下较为恶劣,所受载荷复杂。因此,为保证机械臂可靠运行、安全作业并提高工作效率,对其结构进行优化设计尤为必要。
1应用环境及要求简述
通常情况下厂房干净平整,待装书芯经传送带放置于置物架上,工人将书芯投放到圆盘包本机夹口内完成包本工作。以中小型印刷厂普遍使用的包本机工作要求为例,机械臂的主要任务是将A4尺寸书芯(厚度约10~20mm)从置物架夹取并转移到期望位置。设书芯抓取架高度约900mm,置物架、包本机和人三者之间的布局。考虑设计对象具备足够的强度、刚度以免在反复运转过程中出现失载、共振现象;根据空间情况机械臂结构应紧凑,体积适当;对驱动源、传动结构的选取应进行计算校核。
2设计分析
在机械臂结构设计中,传统的产品设计方案是根据设计需求,参考同类产品的经验数据,凭借一定理论判断以选定设计参数,再进行校核计算。其结构复杂,如果对每个零件进行个性化设计,会导致工作量大、开发周期长、效率低下等问题。随着计算机技术的普及,产品设计技术日益成熟,计算机辅助设计已成为现代制造业的发展新趋势,在CAD技术的实际应用中,参数化设计技术是目前主流的发展方向之一。所谓参数化设计是指将模型中的约束信息变量化,使之成为可以调整的参数,给变量化参数赋以不同数值,就可以得到不同大小和不同形状的零件模型,这种设计方法效率高、实现简单、可移植性强,对形状或功能相似的产品设计具有重要意义。用户在设计轮廓时无需准确定位和定形,只需勾画出大致轮廓,然后通过修改标注的尺寸值以达到最终形状,或者只需将邻近的关键部分定义为几个参数,通过对参数的修改实现产品设计。参数化设计在机械臂机械结构中的应用不仅极大地提高了设计和绘图效率,而且体现出很高的应用价值。
3机械臂组成
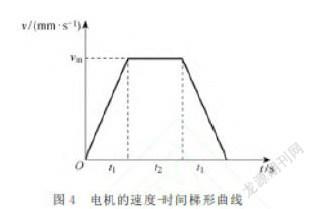
由6组模组滑台驱动,6个松下伺服电机独立控制各个模组滑台,各个滑台和杆之间通过紧定螺钉固连.电机型号为MSMF012L1V2M,即额定功率为100W、额定转矩为0.32N·m的低惯量伺服电机,并带有23位分辨率的绝对式编码器,以及松下的B系列EtherCAT(基于以太网的自动控制技术)总线式驱动器.模组滑台的指标.电机速度模式为梯形速度曲线,如图4所示的时间t与速度v的关系曲线.其中:vm为最大速度;t为加减速时间;t为匀速时间.由表3和图4可知,电机加速到最大速度时间为t=500/500=1s,则图4中加减速段用时为2s,距离为500mm,匀速段时间t=0.2s,匀速距离为100mm,即机械的性能设计上,滑台模组在额定工况下最少需要2t+t=2.2s的时间可以使单模组从一端运动到另一端,对应着连续体机械臂从一种极限姿态转换到另一种极限姿态,这是因为以机械驱动作为系统的输入时,可以把系统看作是6个滑台在模组上的位置到机械臂末端在工作空间中的位姿的映射,因而把机械臂的极限姿态映射到滑台模组上时即部分滑块在模组的极限位置的状态.上述机械驱动效率能够充分发挥机械臂本体在抓取作业时的工作效率,后文的实验将会给出具体数据。
4设计方案三维建模及虚拟装配
可将上述设计方案通过三维建模软件进行各部位零件的建模并进行整机的虚拟装配,例如使用SolidWorks软件完成实体建模,特点是直观且真实,对模型的质量、尺寸、坐标位置等可直接反映出来,通过修改参变量方式可方便地进行分析和改进。在本设计中使用该软件进行建模时将依据所选择的传动结构、零部件完成各个部分的建模,之后进行各部位零件的配合,最终进行虚拟装配完成整机的模型建立。在整机配合中应当遵循自下而上的设计顺序,先将单个零件组成子体,完成如底座、夹持器等各部分,从固定底座开始依次向上进行虚拟装配,并通过如配合等操作命令进行约束配合,最终可使装配好的虚拟样机各部位定位精准。此外,使用该软件还可对机械臂的干涉现象进行检查,可快速找到干涉对象方便修改,缩短设计周期。
结束语
在轻物品智能抓取、与环境安全交互、狭小空间灵活作业,尤其是在手术机器人领域等应用场合,连续体机器臂展现的特性相比于传统刚性机器臂的特性具有更好的综合表现,这些特性主要包括工作空间(主要是指包括旋转和平移在内的六自由度空间)、定位精度、手臂的刚性与载荷、体积尺寸、求解和作业效率、成本等方面.由于与应用场景的需求更为匹配,近年来,连续体机器臂不仅成为这些领域的研究热点,还展现了充足的市场潜力。本文主要介绍连续体机器臂的设计以及组成,由并联设计方案三维建模及虚拟装配机器臂。
参考文献:
[1]侯俊逵,熊瑞平,彭博,唐小康.一种气动助力机械臂设计[J].机械,2021,48(02):42-48.
[2]李瑞怡,楊宏斌,李静,徐爱军.隧道维修钢板安装机械臂设计与分析[J].机床与液压,2021,49(02):55-59.
[3]黄红捷.工业机械臂轻量化设计的研究[D].哈尔滨工业大学,2021.
