多功能六轴机器人设计分析
2022-04-20夏明
摘要:借助采摘机器人代替空余劳动力的方法被更广泛应用。因此,提出采摘机器人机械手臂机电一体化设计。对采摘机器人机械手臂的机电一体化结构设计:设计基于机电一体化的机械手臂底座,同时,设计机械臂农作物识别传感器,完成采摘机器人机械手臂机电一体化设计。
关键词:机器人;机械手臂;机电一体化
1、研究背景
我国作为一个农业国家为了促进农业的发展,农业机械化、自动化与智能化是实现现代农业的发展趋势,并成为农业发展力量的必要条件。近年来,随着我国自动控制和机械臂技术的迅速发展,机械臂从工业领域逐渐渗透到农业领域。农业机械臂能够满足采摘的要求成为关键技术之一。在收获的时候,采摘需要大量的人力物力资源,并且效率不高。水果富含营养,对人体有很多好处,人们对水果的需求与日俱增。因此,水果种植面积逐渐增加,而采摘是种植过程中最耗时的,所以水果采摘机械手臂的设计具有重要意义。
2、采摘机器人机械手臂的机电一体化结构设计
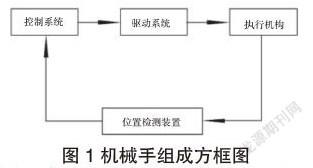
采摘机器人的主要是由机械臂回转部分、机械大臂、机械小臂和机械腕部四部分组成。想要实现农作物的自由采摘,机械臂的灵活度至少要和人类手臂的灵活度一致,因此机械臂回转部分要保证机械手臂可以进行360°的旋转。机械臂的大臂拥有2个自由度,小臂也需要拥有2个自由度。机械臂的大臂和小臂之间的结构采用平行四边形连接方式,比起传统方式的矩形结构,平行四边形的机械臂的水平和垂直运动的灵活性更好。[1]如图1所示。
机械手臂的启动设备中增加离合器,这样可以保证在做回转运动的时候在足够驱动力的前提下,还能保证回转灵活。将传统机械臂中所用的丝杠螺丝改换成小型推杆。丝杠螺丝会限制机械手臂在实操中的升降速度,小型推杆的双螺母结构会消除空气阻力,加快机械臂的运动速度。
3、水果采摘机械手臂的设计方案
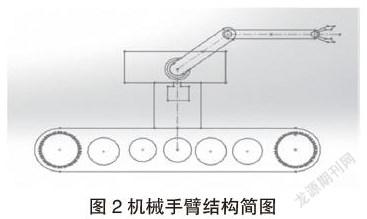
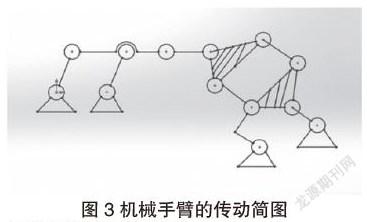
日常生活中水果的种类繁多,每种水果的生产环境有所不同,果树的高度也有所不同。本文主要研究关于苹果等水果类采摘智能机械手臂的研究。本机械手臂主要包括两部分,分别是两自由度的移动载体和四自由度的机械手臂。机械手臂的第一自由度控制机械手臂底座的转动,二三自由度控制机械手臂伸展,第四自由度控制机械爪的张开与闭合。[2]机械手臂的结构简图及传动简图如图2、图3所示。
4、采摘机械手臂底座设计
机械臂灵活的移动范围相对较小,这就导致了机械臂在果园中无法自由移动去采摘果实,为了解决这一问题,可以设计一个可移动的机械臂底座,以增加机械臂的灵活性,适用于果园摘果。苹果果实的生长地面一般不平坦。因此,所选的机械臂应该能够在各种路面上前进,以方便后续采摘移动。因此,可以选用履带式车轮、平板式车架,这使得机械臂的运动平稳,容易固定。
5、采摘机械臂结构设计
根据机械手臂工作时动作形态中坐标形式的不同,农业机械手臂可分为以下四种:圆柱坐标型、直角坐标型、极坐标型和多关节型。
1)圆柱坐标型。该类机械手臂的工作范围是一圆柱体,它是由转动关节和移动关节组成的机械臂,结构比較简单。它主要是由垂直柱子、水平移动关节和底座构成。这类机械手臂的水平移动关节装在垂直柱子上,能自由伸缩,并可沿垂直柱子上下运动;垂直柱子安装在底座上,并与水平移动关节一起绕底座转动。圆柱坐标型机械手臂的特点有:占地面积比较小,活动范围比较大,结构比较紧凑,定位精度比较高等。但是,灵活度比较差是圆柱形机械手臂的主要缺陷。
2)直角坐标型。直角坐标系末端执行器的工作位置是由三个相互垂直的并且做直线运动的轴来确定的。这种机构比较简单,适合自由度要求不多的机械手臂,由于三轴互相垂直,可以当成空间直角坐标系来看,所以这一类的机械臂定位都是很精确的。但是这类机械手占地空间比较大,灵活性不好,如果用在农业上会存在一定局限性。[3]
参考文献:
[1] 罗昕.机电自动化控制系统的一体化设计[J]. 南方农机,2020.
[2] 申永胜.机械原理教程[M]3版.北京:清华大学出版社,2018.
[3] 成理鹏,张继光,李春雪.一种水果采摘机的结构及功能设计[J].南方农机,2018.
作者简介:夏明(1996.05-),山东交通学院本科学生,指导老师:李光。92391A63-24D9-4CB8-991C-12C615E30BB5
