基于负载预测的车联网信道拥塞控制策略*
2022-04-19朱永豪
杨 戈 ,朱永豪
(1.北京师范大学珠海分校 智能多媒体技术重点实验室,广东 珠海 519087;2.北京师范大学自然科学高等研究院,广东 珠海 519087)
0 引言
近年来我国汽车总量持续增加,社会急需建立基于车联网的新型智能交通管理系统。智能交通管理系统能够对当前道路交通状况进行实时监控,对道路车辆进行交通疏导,保证车辆驾驶员的行车安全。
目前,5G 网络基本实现了全面部署,VANET(Vehicle Ad hoc Network)车联网成为了各国家重点发展方向。2020 年,欧盟、美国、俄罗斯等都将车联网发展作为国家重点扶持项目,将车联网全面部署作为国家重大目标。同样地,我国也已经将车联网作为国家重点发展项目进行研究和推进,正在重点发展车联网的自动驾驶技术和辅助驾驶技术产业化的研究[1-7]。
1 C2SLP 功率控制策略设计与实现
本文提出一种基于信道负载预测的车联网功率控制策略(Congestion Control Strategy based on Channel Load Prediction,C2SLP),通过控制车联网数据包传输功率来提前避免信道拥塞的发生。首先进行当前信道负载值的评估,然后将所得当前时刻的信道负载评估值代入差分自回归移动平均模型(Auto Regressive Integrated Moving Average,ARIMA)[8],预测下一时刻的信道负载值,得到预测值后,将其代入功率控制算法。算法将控制传输功率的问题等价替换为调整传输距离的问题,根据预测值调整传输距离,实现信道拥塞控制。整个拥塞控制策略可分为3 个模块:信道负载评估模块、基于ARIMA 模型的信道负载预测模块、基于负载预测的功率控制调整模块。
1.1 信道负载评估模块
在信道负载评估模块,本文使用带冲突避免的载波侦听多址访问协议的信道检测功能对信道进行感知,根据所得结果计算信道繁忙时间所占比例大小,设KP 值为信道繁忙时间占比,以此来判断当前时刻的信道状态。据相关研究表明[9-15],KP 值不会因地理环境、车辆密度或数据包大小等参数的不同而出现不同取值,所以KP值可作为一个稳定可靠的评判标准来反映信道负载的评估结果,研究结果表示,当信道繁忙占比值为0.5~0.8时,信道利用率最高,网络资源浪费最少。
繁忙检测过后,协议的信道繁忙检测功能会返回信道繁忙指示值ωi,忙时值为1,闲时值为0,将检测时间段T 内的检测结果代入式(1):

其中,ωi表示信道繁忙指示值,忙时值为1,闲时值为0;T 为信道检测总时长,t 表示检测间隔时间,取值为1 s,则时间间隔T 内的检测次数为T/t。由式(1)可知,值KP表示在T 内进行T/t 次检测后计算出的信道繁忙时长所占的比例,KP 值越大,信道繁忙时长占比越高,负载越大;反之信道繁忙时长占比越小,负载越小。
1.2 基于ARIMA 的信道负载预测模块
信道负载预测部分基于1.1 节所得信道负载评估KP 值序列,将该序列值代入模型中对下一时刻信道负载值进行预测。ARIMA 模型是典型的时间序列预测模型,其对于短时间内网络流量的预测准确性高,适应环境转变迅速,算法复杂度低。
ARIMA 模型可分为三部分,其中AR 指自回归部分,I 指差分的阶数,MA 指移动平均部分。本文输入当前时刻负载评估数列值,经过模型公式计算后得到下一时刻的预测时间序列值。
AR 自回归模型用于描述当前信道负载值与历史负载值之间的关系,主要用于实现预测部分功能,p 为模型参数,P 阶的自回归过程如式(2)所示:

其 中,Xt是当前时刻KP 值序列,γ 是自相关系数,σ 是时刻t 的误差值,μ 是常数项。MA 移动平均模型主要用于实现误差消去功能,能够有效地消除自回归预测中出现的误差与波动,q 阶移的动平均过程如式(3)所示:

I 为d 阶差分,因为车联网的信道负载序列因地理环境、车辆密度或数据包的大小等参数的不同而具有不稳定性,而该模型的参数数据对稳定性的要求较高,所以需首先通过式(4)进行d 次差分的到平稳的新序列Yt。

根据其线性回归的特有性质,可得到模型公式如式(5)所示,以历史序列KP 值为参数,将Yt代入式(5)中得到下一时刻信道负载预测值。

其 中,c 为初始KP 值,α 序列为AR 模型参 数,θ 序列为MA 模型参数,σ 序列为误差值。
1.3 基于负载预测的功率控制模块
得到信道负载预测值后,根据下一时刻的负载预测值进行传输功率控制,由于传输功率与传输距离线性相关,传输功率越高则传输距离越远,传输功率越低则传输距离越近。本文根据传输功率的这一特质提出了C2SLP 算法,将调整传输功率的问题等价转换为调整消息传输距离问题,传输距离控制公式如式(6)所示,主要参数求取过程如式(7)~式(9)所示。

其中,Si(t)为计算所得的最佳传输距离,η 为调整因子,需由式(7)求得;dsafe为最小安全传输距离,需由式(8)、式(9)求得;D 为最大安全传输距离,根据仿真实验要求取600 m。

首先,通过式(7)求得调整因子,其中,KP*为预设信道拥塞标准值[9],取值为0.7;KPi为预测信道负载大小。
若预测值小于标准值,η 根据预测KP 值大小进行取值。KP 值越高说明拥塞程度越高,则调整因子取较小值;KP 值低说明拥塞程度低,则调整因子取较大值;若预测值大于标准值,说明已经发生信道拥塞,直接将调整因子置为0。
车辆最小安全传输距离dsafe的求取中,本文考虑了现实中最常见的两种场景,分别是车辆同向行驶场景和车辆对向行驶场景。
(1)车辆同向行驶场景
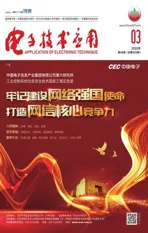
该场景下,车辆同方向行驶,如图1 所示,后车为A车,前车为B 车。θA和θB分别为A 车和B 车的行驶角度,角度相减取绝对值|θA-θB|=μ,若μ 值足够小,则可判定两车同向行驶。该场景最小车距dsafe求得过程如式(8)所示:
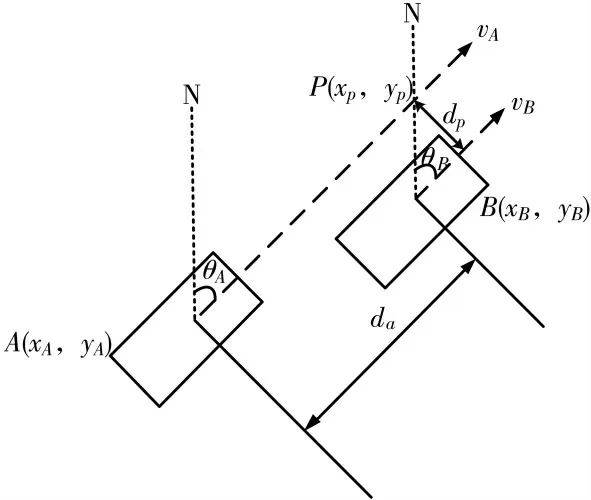
图1 车辆同向行驶[12]

其中,dmin为最小可接受车距,根据仿真实验要求取值为10 m;tr为司机反应时间;vA和vB为车辆A 和B 的速度;aA和aB为两车的最大加速度。
(2)车辆对向行驶场景
该场景下,两车辆对向行驶,如图2 所示,θA和θB分别 为A 车和B 车的行驶角度,通过||θA-θB|-π|=μ 来判断两车辆所处场景是否属于该场景,若μ 的值足够小,则说明两车为对向行驶,该场景最小车距dsafe求得过程如式(9)所示:
图2 车辆对向行驶[12]

其中,dmin为最小可接受车距,根据仿真实验要求取值为10 m;tr为司机反应时间;vA和vB为车辆A 和B 的速度;aA和aB为两车的最大加速度。
由式(7)~式(9)求得主要参数后,代入式(6)求得最佳传输距离,通过调整传输距离为Si(t)来实现提前调整车辆节点传输功率,以达到提前避免信道拥塞的效果。
2 仿真实验与结果分析
本节通过对比C2SLP 策略和UBRCC 策略的实验结果进行分析,分别从传输时延、信道占用率两方面验证算法性能。
2.1 实验环境
实验硬件环境:处理器Intel®CoreTMi7-6700HQ 2.60 GHz,8 GB 内存,硬盘为Samsung SSD 850 EVO M.2 250 GB,显卡为NVIDIA GeForce 960M。
实验软件环境:操作系统Microsoft Windows 10 64 位,集成开发环境MATLAB,开发语言为C 语言,任务图生成器tgff-3.5。
本文使用面向对象的网络仿真器NS2 对算法性能进行检验,使用SUMO(Simulation of Urban Mobility)交通仿真模拟软件构建道路模型[10]。本文利用SUMO 交通仿真器构建了如图3 所示的街区仿真拓扑图,在NS2 中搭建车联网协议架构,在应用层对每个车辆节点添加数据分组发送器和接收器;运输层使用UDP 用户数据包传输协议;在网络层使用洪泛协议实现数据包周期性发送;在数据链路层选择传输速率为6 Mb/s的IEEE802.11P 协议。将功率控制周期设置为1 s。仿真实验会将C2SLP 拥塞控制策略与UBRCC 拥塞控制策略在传输时延和信道占用率两方面进行对比和分析。
图3 仿真拓扑图
2.2 实验结果分析
基于表1 和表2 所列仿真参数,使用网络仿真器和交通仿真模拟软件对C2SLP 控制策略和UBRCC 算法进行仿真实验,通过对比实验结果以验证算法性能。
表1 仿真参数
表2 算法参数
信道占用率的收敛过程如图4 所示,两种算法均可有效地控制信道拥塞。在仿真实验初期,信道占用率随着车流平均密度的增加开始稳步上升稳定至0.6 左右,此时信道资源得到了充分利用。在20 s 时车辆密度上升,UBRCC 算法虽然有效控制了信道拥塞,但信道占用率在20 s 时升至了0.9,发生了信道拥塞,而C2SLP 算法通过信道负载预测提前调整传输功率,成功避免了信道拥塞的产生。从图4 可以看出,C2SLP 控制策略的稳定性优于UBRCC 算法,信道资源得到了更充分的利用。
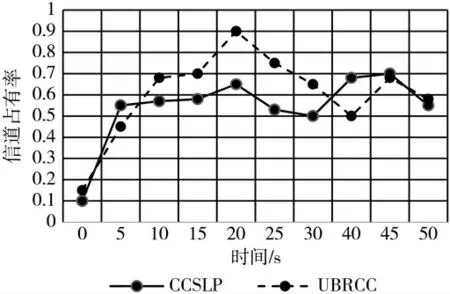
图4 信道占用率
图5 描述了车辆密度增加时C2SLP、UBRCC、固定传输功率的平均消息传输时延。20 s 时车辆密度增加,车联网中的车辆的平均传输时延增加。固定功率的情况下传输时延急剧上升,甚至达到了160 ms,有功率控制的情况下,C2SLP 的平均传输时延稳定在30 ms,始终低于UBRCC,可看出C2SLP 能够确保数据分组的可靠发送和及时传输,满足了车辆的安全需求。
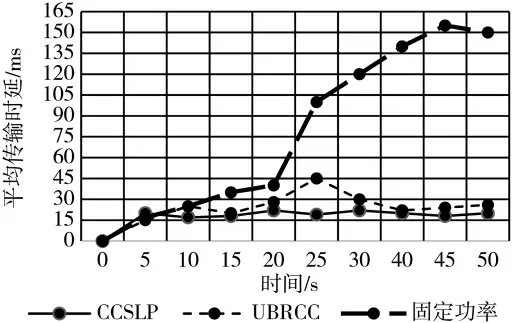
图5 平均传输时延
3 结论
本文提出了C2SLP 算法,针对现有可知的准确信道负载值,来预测下一时刻的车联网信道负载概率,根据预测值使用C2SLP 拥塞控制策略自适应调整传输功率,消除了现有拥塞控制算法相对被动且具有滞后性的缺点,提前避免了信道拥塞,满足了车联网安全应用的需要。在保证车辆之间安全距离的同时通过调整传输距离来避免信道资源的紧缺和信道的拥塞。