应用车载双激光雷达系统构建的林分高度测算方法
2022-04-19宋佳音赵越宋文龙周宏威马强尹天瑞池志祥张晓鹏
宋佳音 赵越 宋文龙 周宏威 马强 尹天瑞 池志祥 张晓鹏
摘 要:为解决林分高度难以直接测量,避免受到环境因素的影响,研究人员从三维点云数据来获取林分高度。该文提出一种车载双激光雷达系统,双雷达分别完成林分数据扫描和地图构建的工作,在点云数据处理中,使用递进式点云滤波方法,选取适合林分点云数据的处理条件,对林分点云数据进行还原,使得到的林分点云数据更好地进行配准、特征提取和可视化,并测量林分高度。实验结果与现场实测数据进行比较表明,该文提出的方法对林分高度测量误差为0.072~0.316 m,平均相对误差为1.46%,具有精度高、受人为操作影响小、数据获取效率高等优势,且测量仪器轻便、成本低,适用于野外调查。该方法能够用于提高林业研究中林分结构参数的测量精度和效率。
关键词:激光雷达;森林遥感;林分高度;点云处理;融合滤波
中图分类号:S758 文献标识码:A 文章編号:1006-8023(2022)02-0080-07
Stand Height Measurement Method Constructed by
Vehicle-mounted Dual LiDAR System
SONG Jiayin1, ZHAO Yue1, SONG Wenlong1*, ZHOU Hongwei1, MA Qiang1,
YIN Tianrui1, CHI Zhixiang1, ZHANG Xiaopeng2
(1.College of Mechanical and Electrical Engineering, Northeast Forestry University, Harbin 150040,China;
2.Comba Telecom Systems Limited, Guangzhou 510000, China)
Abstract:In order to solve the difficulty of directly measuring the stand height and avoid being affected by environmental factors, forest researchers obtained the stand height from 3D point cloud data. In this paper, a vehicle-mounted dual lidar system was proposed. The dual lidars completed the work of forest stand data scanning and map construction, respectively. In the point cloud data processing, the progressive point cloud filtering method was used to select the processing suitable for the forest stand point cloud data. Restore the stand point cloud data, so that the obtained stand point cloud data can be better registered, feature extraction and visualization, and the stand height can be measured. The comparison between the experimental results and the field measured data showed that the method proposed in this paper had a measurement error of 0.072-0.316 m for stand height, and the average relative error was 1.46%. Moreover, the measuring instrument was light and low in cost, and was suitable for field investigation. This method can be used to improve the measurement accuracy and efficiency of stand structure parameters in forestry research.
Keywords:LiDAR; forest remote sensing; stand height; point cloud processing; fusion filtering
0 引言
森林作为陆地生态系统的主体具备固碳能力,在全球碳循环中具有重要地位。林分高度是生态系统模型的重要输入参数之一,是研究森林生物量与生产力的关键因素,因此林分高度的测量是研究全球碳循环、能量平衡的前提条件,然而树木作为林分的基本组成单元,呈现三维空间不规则分布,决定了林分高度精确测算难度大。
林分高度最初通过卡尺或者测高尺等测量工具进行测量,这些方法获得信息单一、测量难度大、准确性低,无法保证测量精度,在复杂的森林环境下,林业调查者很难直接达到树木所需测量的位置,使直接接触测量无法实现,因此,非接触测量得到了发展。随着技术的进步,越来越多的非接触测量方法和测量设备出现,目前常用的非接触测量林分高度方法主要有布鲁莱斯测高器测量和超声波测高器测量,布鲁莱斯测高器构造简单,在测量时需要提前测出仪器到待测树木的距离,存在读数误差及测量精度低、应用不便等缺点;超声波测高器是利用超声波测距搭配旋转角度计算林分高度,该方法测量步骤较繁琐,并且超声波测高器受人为因素和风速的影响,在每次测量中都有很大的差异,测量精度低。因此,林分高度的测量仍然是专家学者们努力改进的问题。
为提高测量精度,研究人员利用电子经纬仪和全站仪进行了林分高度测量,这些仪器使测量精度大大提高,但这些测量仪器尺寸普遍偏大,携带不便,无法在一些复杂的环境中开展林业调查工作。遥感技术的应用为森林资源核查提供了快速高效、全面可靠的技术保障,利用野外的光谱信息获取森林中的空间分布、识别林型和估算林地生物量,并对森林质量进行评估,还能对森林的病虫害进行监测。遥感领域中激光雷达技术的出现,对光学遥感技术的不足提供了有效的补充。激光雷达对林冠层有很强的穿透能力,并通过计算激光脉冲发射和返回的时间差,分析返回的激光雷达数据能够准确地获取森林三维空间结构及林下地形的详细信息。
随着科技的发展和信息技术的日益完善,林业研究与调查工作也步入信息化时代。一些学者和林业工作者将三维激光扫描技术、机载激光雷达技术和航空摄影等先进技术应用到林分高度测量上,进行了一些有意义的尝试。应用机载激光雷达以及高分辨率数码影像技术分析阔叶林群落垂直结构,可以较好地进行植被三维特征的提取并应用于森林生态系统检测模拟;然而,随着对数据精度要求越来越高,机载激光雷达的飞行成本也更大,同时,机载激光雷达还存在悬停扫描抖动的问题。相比机载激光雷达,地基激光雷达具有扫描状态稳定,扫描成本低的优势,近几年地基激光雷达发展迅速,应用到了林业研究中的很多方面;但地基激光雷达仍存在很多缺陷,如自动化程度低、扫描范围受限、当树木分布较为密集时,周围的噪点会增多等问题。
本文提出一种车载双激光雷达系统,双激光雷达分别完成林分扫描与地图构建的工作,自主搭建的激光雷达装置,具有体积小、易于携带和成本低等优点。同时提出一种林分点云数据融合滤波方法,提高了点云数据的精度及实用性,为林业研究与调查工作提高了测量精度和效率。
1 样地概况与设备
1.1 样地概况
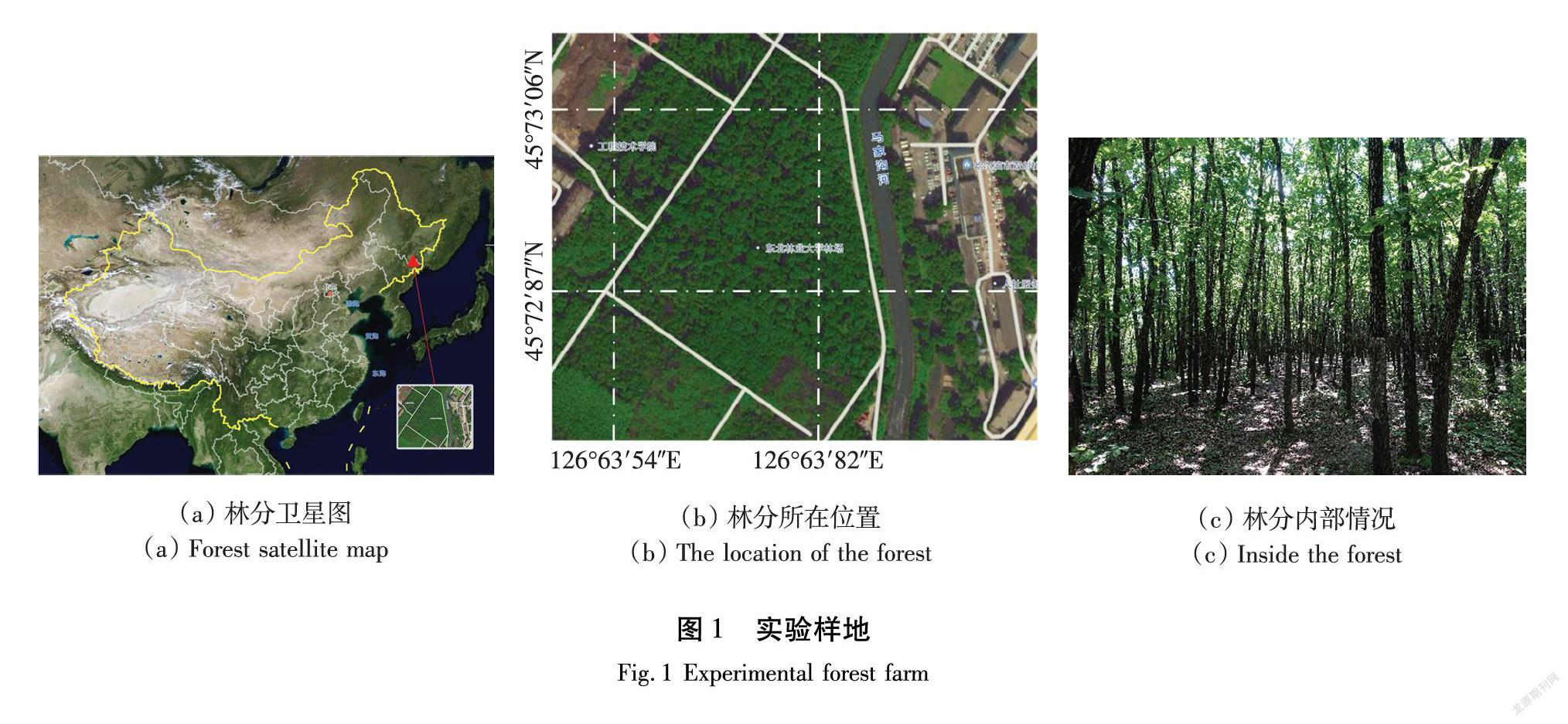
研究区位于哈尔滨市城市林业示范基地,地理坐标为45°43′10″ N,126°37′15″ E,研究区海拔为134~163 m,属温带季风气候,夏季温暖多雨,冬季寒冷多雪。蒙古栎林区林分郁闭度为0.8,且林分仅有乔木层,无灌木层和草本层,林区总占地面积为0.35 hm2,林区内共有蒙古栎886株,平均树高为14 m,平均胸径为14 cm,最大胸径为18 cm,活立木储蓄量为65.6 m3。这种林分状况代表了典型的温带森林或自然生长的普通城区森林,实验样地如图1所示。
1.2 车载双激光雷达系统
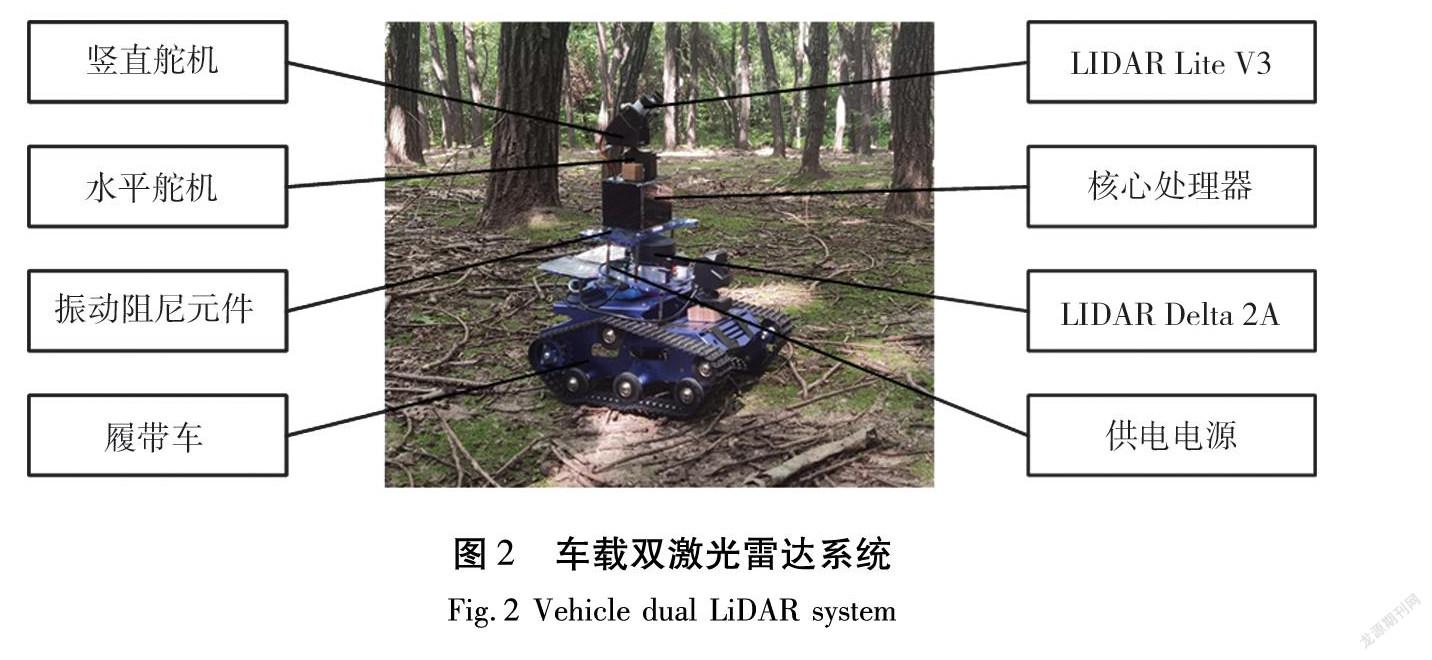
本研究利用自主设计的车载双激光雷达系统完成数据采集,车载双激光雷达系统核心处理器为STM32和Arduino芯片,林分扫描激光雷达和SLAM地图构建与导航激光雷达分别安装在小车顶部和中部,林分扫描激光雷达型号为LIDAR Lite V3(Garmin台湾生产),最远有效探测距离为4 000 cm,测量精度为10 mm,更新速度为500 Hz,波束宽度为0.5°,雷达波长为905 nm,供电电源为5 V,利用垂直与水平的双舵机控制轉动,完成样地内的树木三维信息的采集,雷达扫描范围呈1/4球体,实验选取的蒙古栎平均树高为14 m,最远有效探测距离为4 000 cm的LIDAR Lite V3可以扫描到树冠顶部。SLAM地图构建与导航激光雷达型号为LIDAR Delta 2A,有效测量半径为800 cm,测量精度为20 mm,供电电源为5 V,LIDAR Delta 2A在研究中配合小车完成SLAM地图构建与导航工作。
LIDAR Lite V3和舵机牢固地安装在一起,并通过振动阻尼元件固定在履带车框架下。舵机和激光雷达以相对于履带车框架法向90°角,避免LIDAR Lite V3采集林分信息时受到车体影响,车载双激光雷达系统如图2所示。
2 林分高度测算方法
样地选取为哈尔滨市城市林业示范基地蒙古栎林区的一片区域,测算开始前,首先对区域内的100棵蒙古栎进行标记和编号,再对车载双激光雷达系统进行路线规划,林分高度测算流程如图3所示。
2.1 扫描数据获取
车载双激光雷达系统的运行按照标定点自动进行,LIDAR Lite V3由操作人员使用笔记本电脑操控开始扫描,人工操作保证了LIDAR Lite V3获取林分数据的准确性。试验区参考树总数为100棵,扫描共选取16个标定点,每2个相邻采样点之间间隔为10 m,LIDAR Lite V3扫描过程中履带车为静止状态,单次扫描结束后前往下一标定点,直到车载双激光雷达系统完全穿过林区,标定点与路径规划如图4所示。
车载双激光雷达系统扫描首先由LIDAR Delta 2A完成地图构建,确定运行轨迹,再利用林分扫描激光雷达扫描森林,收集野外林分数据。由操作人员控制履带车在扫描林地巡回移动,放慢履带车的移动速度,将有利于获取更完整的林区地图,林区地图构建完成后,操作人员选取起止点,履带车可自动完成导航,并躲避途中遇到的障碍。林分扫描激光雷达使用LIDAR Lite V3扫描仪和2个舵机搭建,2个舵机分别控制水平和竖直方向。林分扫描激光雷达的扫描速度可调节,生成点云所需要的工作时间与生成点云的密度成正相关。舵机的角度变换设置为1时,0~180°视野扫描耗时6.5 min,此时在距离扫描仪10 m的水平和垂直方向上提供10.53 mm的点间距。采用多扫描方法,共进行32次扫描,车载双激光雷达系统4 h内可完成地图构建与林分扫描,地图构建与林分扫描示意图如图5所示。
2.2 林分点云数据处理
扫描数据获取过程中,由于受到设备震动、环境光线、风和飞虫等干扰因素的影响,使得点云数据中存在噪声。为获取林分有效信息,实现林分信息的配准和特征提取,保证测量精度,需要剔除噪声。本文提出采用梯度-SOR递进式滤波方法,完成点云数据处理,处理软件为Matlab 2019b,运行平台为Windows 10系统。
在进行滤波之前,先将获取的原始点云数据单位由方位角、天顶角、距离转换为直角坐标系下的X、Y、Z坐标,同时将反射距离大于4 000 cm的点云和反射距离等于1 cm的点云作为噪声过滤。
2.2.1 地面点处理
原始点云数据包含地面点云数据和林分点云数据,为获取林分有效信息,需将地面点云与林分点云清晰分割,故对原始点云数据进行梯度条件滤波,首先为LIDAR Lite V3获取的点云数据添加Scalar标量字段,接着计算梯度字段,梯度字段按照欧氏距离的计算方法计算,添加Scalar标量字段与梯度字段计算使用CloudCompare(三维点云处理软件)完成,此时梯度字段值表示的是点云中2个相邻点之间的倾斜度,计算梯度字段后,将梯度字段的值位于0~0.2的点云去除,滤波效果如图6所示,梯度字段的值位于0~0.2的点云为图中蓝色的点。
由图6可以看出,梯度条件滤波对树木和地面的分割效果良好,但在树木周围仍存在很多噪点,需要进一步处理。
2.2.2 林分结构还原
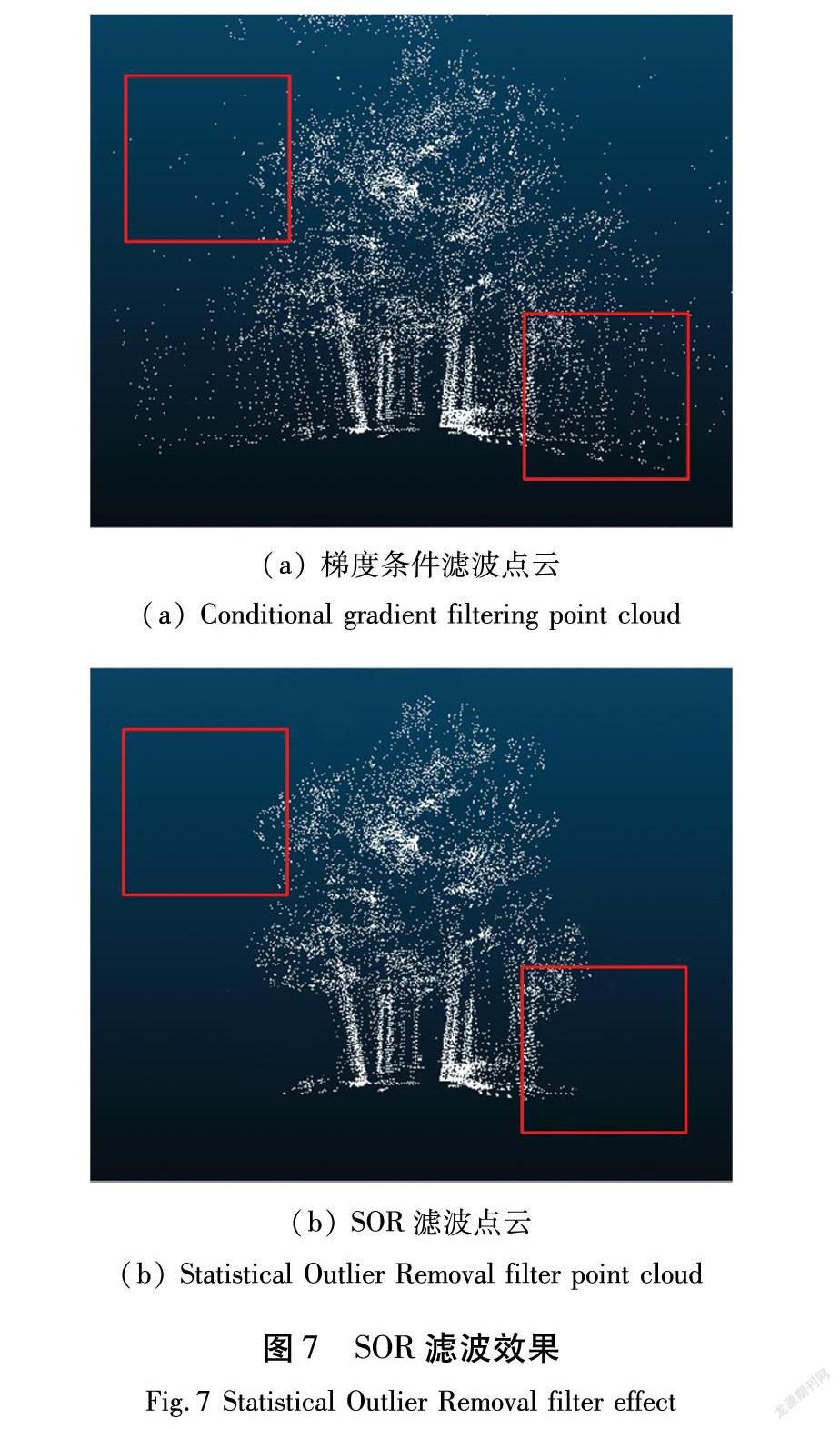
为将树木周围的噪点剔除,采用SOR(Statistical Outlier Removal)滤波方法,SOR滤波也称基于空间分布的去噪滤波。SOR滤波的具体步骤如下:首先,需要设置用于计算平均距离的邻域点的个数k和标准差倍数阈值λ参数,当该点与其邻域中各点的平均距离大于μ±σλ(μ为估计的平均距离;σ为估计的标准差),则该点被认为是不属于林分点云,并且远离林分点云的孤点,并删除该数据点。假设空间点p与其相邻的n个邻域点构成原始林分点云集Dn,则离群点就是与n个邻域点的距离大于阈值μ±σλ的点。本文中设置邻域点的个数k=6,标准差倍数阈值λ=1,经滤波处理后,可以清晰地将树木从复杂环境中提取出来,完成林分结构还原。SOR滤波效果如图7所示。
2.3 林分高度提取与结果分析
为了验证本文提出的林分高度测算方法的精度,对100棵树木进行测量,林分高度提取实验设备包括双雷达履带车(LIDAR Lite V3和LIDAR Delta 2A)、笔记本电脑以及全站仪(南方NTS-362)。LIDAR Lite V3每次扫描得到32 581个点,累计扫描32次,点云数据处理在Windows10系统平台上进行,处理软件为Matlab 2019b以及CloudCompare。将经递进滤波后的点云数据使用CloudCompare软件的Point picking工具识别和提取林分高度,林分高度提取如图8所示。
从图9和图10可以看出,利用本文提出的方法测算林分高度比较符合实地测量值,但普遍低于实地测量值,这是由于地基激光雷达在密度较高的森林中扫描树冠困难造成的。通过计算分析得到,在蒙古栎林区中测量的100颗树中,测量误差在0.172~0.316 m,最高相对误差为2.23%,最低相对误差为1.27%,平均相对误差为1.46%,从而得出本文提出的应用双激光雷达系统构建的林分高度测算方法测量精度较高,满足国家森林资源调查中允许测量林分高度不超过5%的误差要求,并且测量时操作简单,受人为因素影响较小。
3 结论
森林监测已经成为科学界关注的热点之一。森林生态系统在全球碳平衡和减缓全球气候变化方面具有不可替代的作用,林分高度作为森林碳储的重要指标是森林研究的热点。本文应用车载双激光雷达系统构建了一种林分高度测算方法,该方法具有以下优点。
(1)使用的测量设备操作简单,自动化程度高,可应用于野外作业,且随着遥感设备和电子技术的快速发展,该设备仍有较大改进空间。
(2)可以还原林分结构,通过递进式滤波方法,分别针对地面噪点和树木周围的噪点进行滤波处理,保证了测量精度。
(3)该方法同样适用于其他林分结构参数的测量,如冠幅和胸径等,本文仅以林分高度为例。
本研究存在的不足是当树木密度大、遮挡严重时,无法准确扫描树冠,针对该问题,在今后的研究中可以考虑使用无人机进行数据融合配准,对树冠部分进行完整的还原。
【参 考 文 献】
陈剑.森林、林业与生态文明建设.现代园艺,2018,41(11):153-154.
CHEN J. Forest, forestry and ecological civilization construction . Xiandai Horticulture, 2018, 41(11): 153-154.
HUANG Y D, LI M Z, REN S Q, et al. Impacts of tree-planting pattern and trunk height on the airflow and pollutant dispersion inside a street canyon. Building and Environment, 2019, 165: 106385.
XU Y L, LI C, SUN Z C, et al. Tree height explains stand volume of closed-canopy stands: evidence from forest inventory data of China. Forest Ecology and Management, 2019, 438: 51-56.
鄢前飛.林业数字式测高测距仪的研制.中南林业科技大学学报,2007,27(5):66-70.
YAN Q F. The development of digital forestry measuring instrument for height and distance. Journal of Central South University of Forestry & Technology, 2007, 27(5): 66-70.
李亚东,冯仲科,曹明兰,等.Android智能手机树高测量APP开发与试验.中南林业科技大学学报,2016,36(10):78-82.
LI Y D, FENG Z K, CAO M L, et al. Development and test of android smartphone tree height measurement APP. Journal of Central South University of Forestry & Technology, 2016, 36(10): 78-82.
李明泽,范文义,张元元.基于全數字摄影测量的林分立木高度量测.北京林业大学学报,2009,31(2):74-79.
LI M Z, FAN W Y, ZHANG Y Y. Measuring heights of standing trees based on digital photogrammetry. Journal of Beijing Forestry University, 2009, 31(2): 74-79.
谢鸿宇,温志庆,钟世锦,等.无棱镜全站仪测量树高及树冠的方法研究.中南林业科技大学学报,2011,31(11):53-58.
XIE H Y, WEN Z Q, ZHONG S J, et al. Measure method research of tree height and tree crown by non-prism total station. Journal of Central South University of Forestry & Technology, 2011, 31(11): 53-58.
杜鹏志,曾伟生,冯仲科,等.利用电子经纬仪测量林木树高和材积的精度分析.林业资源管理,2016,45(2):45-48,55.
DU P Z, ZENG W S, FENG Z K, et al. Precision analysis on tree height and stem volume measurements using electronic theodolite. Forest Resources Management, 2016, 45(2): 45-48, 55.
武红敢,王晗,常原飞,等.刍议枯死松树的天空地协同监测技术体系建设.中国森林病虫,2020,39(3):35-39.
WU H G, WANG H, CHANG Y F, et al. Monitoring system construction of dead pine through synergy observation of spaceborne, airborne, and ground remote sensing. Forest Pest and Disease, 2020, 39(3): 35-39.
王楠,瓮岳太,杨光,等.火干扰对兴安落叶松森林土壤微生物群落的影响.东北林业大学学报,2020,48(5):21-28.
WANG N, WENG Y T, YANG G, et al. Effects of fire disturbance on soil microbial community of Larix gmelini forest. Journal of Northeast Forestry University, 2020, 48(5): 21-28.
云增鑫,郑光,马利霞,等.联合主被动遥感数据定量评价林下植被对叶面积指数估算的影响.遥感技术与应用,2019,34(3):583-594.
YUN Z X, ZHENG G, MA L X, et al. Evaluate quantitatively effects of understory on leaf area index (LAI) estimation combining active and passive remote sensing data. Remote Sensing Technology and Application, 2019, 34(3): 583-594.
范伟伟,刘浩然,徐永胜,等.基于地基激光雷达和手持式移动激光雷达的单木结构参数提取精度对比.中南林业科技大学学报,2020,40(8):63-74.
FAN W W, LIU H R, XU Y S, et al. Comparison of extraction precision of individual tree structure parameters based on terrestrial laser scanning and hand-held mobile laser scanning. Journal of Central South University of Forestry & Technology, 2020, 40(8): 63-74.
穆喜云,刘清旺,庞勇,等.基于机载激光雷达的森林地上碳储量估测.东北林业大学学报,2016,44(11):52-56.
MU X Y, LIU Q W, PANG Y, et al. Forest aboveground carbon storage using RF algorithmic model and airborne LiDAR data. Journal of Northeast Forestry University, 2016, 44(11): 52-56.
宋佳音,张晓鹏,宋文龙,等.应用半球图像构建的立木高度测算方法.东北林业大学学报,2020,48(6):61-65.
SONG J Y, ZHANG X P, SONG W L, et al. Measuring standing wood height with hemispherical image. Journal of Northeast Forestry University, 2020, 48(6): 61-65.
聂佩晗,缪慧敏,张雅婷,等.线激光三维测量装置研制.林业机械与木工设备,2021,49(8):36-40.
NIE P H, MIAO H M, ZHANG Y T, et al. Development of line laser 3D measuring device. Forestry Machinery & Woodworking Equipment, 2021, 49(8): 36-40.
解宇陽,王彬,姚扬,等.基于无人机激光雷达遥感的亚热带常绿阔叶林群落垂直结构分析.生态学报,2020,40(3):940-951.
XIE Y Y, WANG B, YAO Y, et al. Quantification of vertical community structure of subtropical evergreen broad-leaved forest community using UAV-Lidar data. Acta Ecologica Sinica, 2020, 40(3): 940-951.
赵颖慧,杨海城,甄贞,等. 基于ULS、TLS和超声测高仪的天然次生林中不同林冠层树高估测. 南京林业大学学报(自然科学版), 2021, 45(4): 23-32.
ZHAO Y H, YANG H C, ZHEN Z, ed al. Tree height estimations for different forest canopies in natural secondary forests based on ULS, TLS and ultrasonic altimeter systems.Journal of Nanjing Forestry University (Natural Science Edition), 2021, 45(4): 23-32.
姚相坤,苍甜甜,张一帆,等.基于地基激光雷达构建人工林树高模型的研究.森林工程,2022,38(01):93-100.
YAO X K, CANG T T, ZHANG Y F, et al. Research on constructing tree height model of artificial forest based on ground-based lidar. Forest Engineering, 2022, 38(1):93-100.
田方.基于机载激光雷达的密林山区测绘研究.自动化技术与应用,2021,40(11):86-88,108.
TIAN F. Research on surveying and mapping of dense forest mountain area based on airborne lidar. Techniques of Automation and Applications, 2021, 40(11): 86-88, 108.
罗洪斌,岳彩荣,张国飞,等.机载激光雷达在不同区域尺度森林叶面积指数反演中的应用.西部林业科学,2021,50(4):33-40.
LUO H B, YUE C R, ZHANG G F, et al. Application of airborne LiDAR in inversion forest leaf area index at different regional scales. Journal of West China Forestry Science, 2021, 50(4): 33-40.
蔡硕,邢艳秋,端木嘉龙.背包式激光雷达滤除低强度点云提取林木胸径.森林工程,2021,37(5):12-19.
CAI S, XING Y Q, DUANMU J L. Backpack lidar filtering low-intensity point cloud to extract tree diameter at breast height. Forest Engineering, 2021, 37(5):12-19.
ANDERSON C T, DIETZ S L, POKSWINSKI S M, et al. Traditional field metrics and terrestrial LiDAR predict plant richness in southern pine forests. Forest Ecology and Management, 2021, 491: 119118.
NGUYEN V T, CONSTANT T, COLIN F. An innovative and automated method for characterizing wood defects on trunk surfaces using high-density 3D terrestrial LiDAR data. Annals of Forest Science, 2021, 78(2): 1-18.
孙心雨,田佳榕,徐雁南,等.基于地基激光雷达的道路生态景观评价:以黄海海滨国家森林公园为例.生态与农村环境学报,2020,36(11):1477-1484.
SUN X Y, TIAN J R, XU Y N, et al. Evaluation of ecological landscape of road based on terrestrial laser scanning: a case study of Huanghai national forest park. Journal of Ecology and Rural Environment, 2020, 36(11): 1477-1484.