基于电子透明理念的A柱盲区消除系统
2022-04-18魏小冈
魏小冈
摘 要:汽车A柱结构所产生的视野盲区问题,对驾驶人员造成较大的视野影响,特别是在高速行驶状态下,一旦驾驶人员对外界环境信息观察不细致,当A柱盲区出现障碍物或者行人的状态时,在大脑短时间反应到采取制动操作时,汽车可能行驶出数十米,造成安全事故,对驾驶人员、汽车、行人等,造成严重的损坏。为此,可针对汽车A柱盲区问题进行分析,结合电子透明理念,设定出技术与设备、系统相结合的盲区消除系统,为驾驶人员提供更为广阔的视野面,令驾驶人员可依据外界环境信息做出及时操控行为,降低安全事故的产生概率。基于此,文章以汽车A柱盲区消除设计的必要性为切入点,对A柱盲区消除系统设计及实现进行研究。
关键词:电子透明理念 A柱盲区消除系统 传感器
1 引言
汽车作为重要交通工具,在经济体系的逐步完善下,汽车的普及率得到极大提升,这也使得城区内早晚高峰出现严重的道路阻碍或交通事故问题,对社会发展造成一定的影响。国家交通部门也正针对此类交通问题进行政策制度、交通管理等方面的优化,提高人员的驾驶能力,降低交通阻碍及事故的产生几率。基于电子透明理念的A柱盲区消除系统,则是搭载传感器设备、操控系统等,采取外设安装,建设出一个相对完整的图像信息采集及传输体系,经由数据表述,实现对A柱盲区的“消除”,为驾驶人员提供更为全面的信息服务,增强驾驶的安全性。本文则是针对A柱盲区消除系统进行探讨,仅供参考。
2 汽车A柱盲区消除设计的必要性
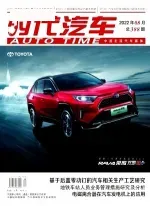
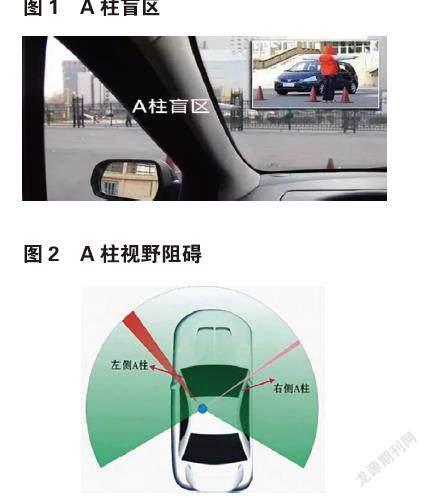
汽车A柱是整个汽车结构的重要组成部分,其不仅承接着碰撞力缓冲的作用,还对整体结构起到一定的支撑效果,确保汽车的稳定性与安全性。如图1所示为A柱盲区,外部环境与内部环境之间的视野差异图,在图中受到A柱盲区的干扰,驾驶人员无法看清车辆左前方的行人,此时进行左转弯时极易引发安全事故。如图2所示为A柱左方与右方的视野阻碍图示。目前我国汽车驾驶人员的位置一般在左侧,这也使得在实现同等阻碍条件下,右侧A柱的视野盲区面要小于左侧住。如果在汽车结构建设中将A柱盲区进行消除的话,则可以整个驾驶环境提供更为广阔的视野面,增加行驶的安全性。同时也是对顾客起到一定的防护效果。对于此,则需要针对 A柱盲区问题进行技术化解析,确保在消除过程中可以利用先进的技术体系及设备,将A柱所存在的结构问题进行取代,只有这样才可以保证驾驶人员可以在行驶过程中拥有更为良好的视野,提高安全驾驶性能。
3 基于电子透明理念的A柱盲区消除系统设计
3.1 设计思路
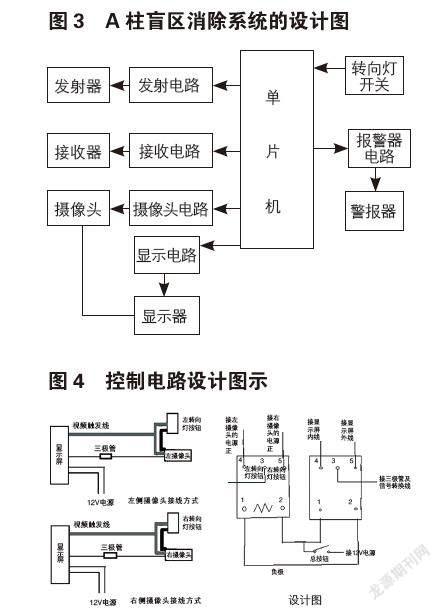
汽车A柱盲区消除系统的建设,是利用传感器及通讯技术等,通过实时监控对A柱遮挡区域信息进行成像处理,确保人员在驾驶室内便可以了解到遮挡区域外部的信息,辅助驾驶,提高整体驾驶的安全性。本文针对盲区消除系统的设计,则是采用摄像头作为道路信息的采集载体、通讯线路作为信息传输载体、车内显示器作为数据呈现载体,在整个系统设计下,可以将外界信息同步关联到内部显示器中,令驾驶人员了解到路况信息。但是考虑到车辆在高速行驶中信息传输中存在一定的时间差问题,如果传感器所接收到的信息在传输过程中存在零点几秒的误差,则汽车可能行使出几十米的距离,此时将造成驾驶人员反应时间缩短的问题。对于此,在系统外应设定一个外接雷达装置,与摄像头一起对外界信息进行采集,避免数据采集遗漏的问题。如图3所示为汽车A柱盲区消除系统的设计图,图4为控制电路设计图示。
3.2 高清广角摄像头
汽车A柱结构分为左右两个区域,且两侧对于驾驶员所产生的盲区视野存在一定的差异性。一般而言,由于左侧A柱距离驾驶人员较近,其所产生的视野盲区更大,而右侧相对于汽车人员的距离较远,在眼睛平视时,所产生的视野盲区较小。对此,在针对 A柱结构设定360°广角摄像头时,则需要安放两个切点,且切点所采集到的视野信息可以与驾驶人员,在驾驶过程中的视野需求相符合,进一步解决A柱的干扰问题。
4 A柱盲区消除系统硬件与实现
4.1 硬件装配
在对汽车A柱盲区消除系统进行设计时,考虑到不同类型汽车,在对A柱结构参数进行设定时,存在一定的差异性,则需要充分考虑到不同硬件在装配过程中,对于A柱结构以及整个视野所呈现出的适用性,确保在硬件配置过程中,既不会对整体结构造成影响,同时也可最大限度将外界信息实时传输到内部显示器中,提高实际观测范畴。本文则是在左侧A柱上镶嵌一个摄像头传感器,考虑到传感器在镶嵌过程中,需要将整个A柱进行孔位贯穿处理,其所产生的应力效果将对整个结构造成一定的影响,甚至可能降低整体结构的稳定性。对于此,在摄像头选取时,应尽量选取与汽车A柱材料结构相一致的摄像头外表材料,然后进行安装与打磨处理,在调整摄像头角度时,应保证摄像头所采集到的视野面,与驾驶人员的人眼观察视野相一致。在汽车A柱结构上设置感应雷达,感应雷达的设定主要是在近距离范围内感测到车辆A柱结构1.5~3米之间的距离,最大限度降低数据信息的传输时长,提高数据传输的精准度。最后,将摄像头传感器与雷达传感器进行线路对接,并同步连接到显示器上,设置好相应的开关触发点,在汽车行驶过程中驾驶人员通过开关的启停操作,及时触发摄像头及雷达装置,进行信息成像,真正达到电子信息技术为驱动的透明化处理,规避A柱视野盲区问题。
4.2 单片机控制
单片机作为集成系统运行的重要载体,其本身所起到的作用是将不同类别的信息集成到一个芯片中,通过综合化处理,提高数据指令的对接效率,保证在最短时间内可以将信息进行相应处理。这对于整个信息视频影像呈现模式而言,可以及时将外界信息传输到内部显示器中,令驾驶人员了解到A柱所造成视野盲区的环境。本文所采用的单片机是具有低功耗高性能的8位控制处理器AT89S52。
在实际运行过程中,此类单片机的引脚可以直接兼容到存储器系统中,同时在编程程序的应用下,可以将整个嵌入式结构深度运用到系统运行框架,增强数据处理效率。在实际控制过程中通过程序编写,将雷达摄像头以及开关进行关联,在电路载体的通讯及能源供应下,确保整个系统可以起到数据传输与报警的功能。在单片机运行过程中,不同通信接口之间的工作性能互不干扰,但是在单片机逻辑控制功能下,可以按照不同供类别的数据进行归类处理,例如影像信息的采集与传输、雷达装置的信息采集与传输、显示装置的成像、开关装置的驱动模式等,在协同化的处理功能之下,可以快速、精准的对数据进行定位与组合,令驾驶人员及时了解到外部环境信息。
5 结语
综上所述,汽车A柱盲区消除系统的研发与应用,可将外界环境信息通过显示器设备进行同步呈现,充分实现透明化的视觉体验,降低汽车行驶过程中安全事故的产生概率。但是在实际设计过程中,应充分考虑到不同汽车类型的A柱结构,确保整个盲区消除系统落实的可行性,真正起到辅助驾驶的作用。
基金资助:重庆市教委2020年科学技术研究计划项目:乘用车A柱盲区可视系统设计(项目编号:KJQN202004602);重庆旅游职业学院校级课题:基于电子透明系统的A柱盲区驾驶员眉眼区域定位方法研究(项目编号:XJKT-2020-13);重庆旅游职业學院入驻众创空间大学生创新创业项目:科技赐予的万能视觉—乘用车A柱盲区可视化系统开发(项目编号:2021ZC02)。
参考文献:
[1]张进,常江,杨赛.基于驾驶辅助的汽车A柱盲区影像显示系统研究[J].汽车实用技术,2021,46(14):16-19.
[2]任学军.探索视野盲区对驾驶员安全驾驶的影响[J].科技风,2020(30):193-194.
[3]张立军,黄露莹,孟德建.基于轨迹预测和模糊分析的商用车盲区防碰撞预警[J].同济大学学报(自然科学版),2019,47(S1):207-212.3D93F9FF-CB7F-4403-A174-389DD4494CF1