半挂列车转弯盲区预警装置设计
2022-04-18汪博海康小鹏谭阳
汪博海 康小鹏 谭阳


摘 要:本文针对半挂列车转弯产生的内轮差危险区域进行了研究,建立了半挂列车简化模型。通过该模型推导计算出稳态转弯工况内轮差公式,设计了可为行人展示的动态内轮差区域投影装置。装置安装在左右后视镜下方,依靠车轮转角控制舵机进行角度调整。实现了半挂列车内轮差的主动预警,直观的展示汽车转弯危险区域,强化装置对行人的警示作用。
关键词:内轮差 区域预警 半挂列车
1 前言
随着中国工业的迅速发展,国内货车的保有量迅速增加。由于半挂列车的结构特殊性,其内轮差相较于城市常见的厢式货车更大,在半挂列车转弯行驶时因为行人对此类车型的内轮差认识不足很容易造成交通事故。据有关部门统计显示,在涉及大型车辆发生的恶性交通事故中,内轮差和盲区引发的事故占70%以上,死亡率超过90%[1]。现阶段针对该类问题的解决方案主要有两类,一类是以静态视觉提醒,如在车侧贴上提醒标语,在地面标识出右转弯区域等,但大多数时候提醒效果不佳;另一类是声音信号提醒,如在转弯时通过外置喇叭发出提示音,但常常会被嘈杂的环境音所掩盖,预警效果不直观且受环境因素影响较大。针对上述方案存在的问题,本文提出了一种基于光线投影的原理来标识危险区域的方案,可以实时地将车辆转弯时的内轮差覆盖区域直观地投影在地面。
2 车辆模型建立
由于在计算时,考虑转向轮转角不一情况对内轮差大小影响不大,同时为考虑简化几何关系推导。本文假设半挂列车被看做牵引车和挂车两个刚体互相通过牵引销连接。车轮转角大小近似于车轴中心运动方向与车身间夹角,牵引销可看作挂车的转向轮车轴中心点。从而构成一个类似于两自行车连接模型[2]。
简化后的车辆模型如图1所示。其中,L1为牵引车轴距,L2为挂车轴距,l为牵引销与牵引车后轴距离,α为前轮转角大小,β为挂车和牵引车中线夹角,b1為牵引车后轴中心距一边轮胎中心的长度,b2是挂车后轴中心距一边轮胎中心的长度。
3 稳态工况下内轮差计算
根据上述建立的模型,在前轮转角保持不变的情况下,根据几何关系牵引车中轴线和半挂车中轴线的夹角β会持续增大直至一个定值。在此过程中,转向内侧轮与挂车中轴线的垂直距离会持续增大,到定值时距离最大。所以在进弯过程中,内轮差始终小于稳态转弯的内轮差,出弯工况也是同理,因此进出弯工况可以不考虑单独进行预警。
根据这一结论,同时考虑到装置提醒时可以适当增加一些安全余量,装置设计便基于半挂列车在稳定转弯情况下计算出其内轮差。在挂车轴距L2、牵引车轴距L1和牵引销距牵引车后轴距离l都已知时,前轮转角α作为输入变量。
如图1,内轮差m是指牵引车转向轮转向半径R1和挂车后轮转向半径R3之差。Rx和R2分别指牵引销转向半径和牵引车后轮转向半径。
4 灯光预警装置方案设计
考虑到预警装置需易于安装和普及的目标,从设计上需要考虑结构的紧凑性和系统的通用性,从产业化和推广的角度来看,成本也需要重点考虑。为了保证装置在尽可能多的环境下提供预警作用,还需要对预警装置的灯光类型和颜色进行筛选。
4.1 灯光控制装置设计
要实现激光灯投影区域随车辆转弯过程实时变化,需要设计一种能够实时调节激光灯偏转角度的控制装置,通过采集车辆的转角信号,计算出投影区域,进而计算控制装置的偏转角度。
图2为半挂列车行驶工况为右转弯、前轮转角为α时的俯视图,S1、S2分别为车辆前进时牵引车前轮、挂车后轮预期轨迹,若保持前轮转角不变,此时车辆的内轮差覆盖区域为S1与S2围成的黄色环扇形区域。K1、K2分别为车辆右转弯前进时的预警光线(如图中蓝色实线)。装置激光灯安装位置为位于左、右后视镜下方的Ⅰ、Ⅱ共两个点,为了能够控制K1和K2两条光线可以独立调整角度,所以每个点位都安装两个激光灯。点Ⅰ位于牵引车左后视镜,其中包括1、2两个激光灯(激光灯1照射方向朝前,激光灯2朝后)。点Ⅱ位于牵引车右后视镜,其中包括3、4两个激光灯(激光灯3照射方向朝前,激光灯4朝后),每个激光灯都由一个舵机进行驱动。
照射K1光线的激光灯的转动是和前轮转角大小一致。照射K2光线的激光灯控制与∠AOB有关,根据几何关系
设挂车后轮路径S2与理论中牵引车前轮转弯半径R1的交点为E,从E点出发做牵引车后轮转弯半径R2的垂线,交点为F。
假设舵机安装高度为h,距离车轮中心的横向距离a,舵机摆动角度为θ,则
根据上述公式舵机可以通过α的变化控制θ的大小,进而控制光线K2距车身的距离。
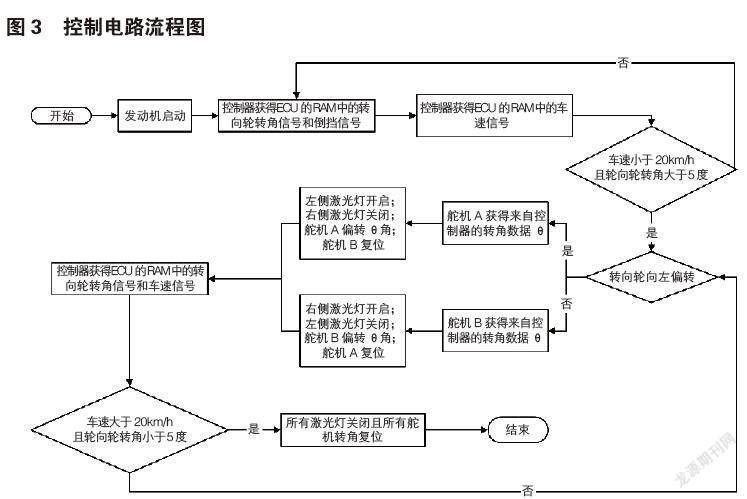
4.2 控制系统总体设计
控制系统的整体控制方案如图3所示,装置供电采用车辆供电系统,控制系统计算所需要的数据来源从ECU的RAM中获取,为转向轮转角信号和车速信号。根据公式(5)计算,当车轮转向角为5°时,内轮差的大小为1.34m,危险性不大。根据调查,大型车转弯平均时速约15km/h[3],所以本文设置该装置的触发条件为:当汽车车速小于20km/h,且转向轮转角大于5°。灯光的安装位置在左右后视镜下方,每个安装位有两个激光灯,一个向车头前方照射,一个向车尾方向照射。以右转弯为例,舵机收到来自控制器的转动角度命令,同时激光灯开启,照向前后两个方向,其中舵机的角度是随着转向轮的转角变化而实时变化,其偏转角度按照公式(12)计算得到。当转弯过程结束后,舵机归位激光灯关闭。
5 结论
本文针对半挂列车转弯时内轮差过大、行人认识不足等原因所导致的交通事故率较高的情况,基于半挂列车低速、大角度转弯工况推导出了稳态工况下内轮差的实时计算公式,并对车辆转弯时的危险区域进行了分析。提出了一种基于可视化的实时预警方案,并设计了一种激光灯的控制系统。该方案可以将车辆转弯时的内轮差覆盖区域通过投影到地面的激光线组实时显示,清晰直观,可以有效提醒行人或非机动车辆,结合声音提醒装置共同使用效果更好。
四川省大学生创新创业训练计划(CDU_CX_2021540)资助。
参考文献:
[1]青岛网警巡查执法. 内轮差!大货车的“死亡弯月”[EB/OL]. https://baijiahao.baidu.com/s?id=1683689037262036925&wfr=spider&for=pc, 2020-11-18.
[2]MICHAEL W,SAYERS. Vehicle off tracking models[J]. Transportation Research Record 1052.
[3]江剑英. 城市道路交叉口右转弯车速影响因素研究[J]. 交通工程,2021-6.3D93F9FF-CB7F-4403-A174-389DD4494CF1