皮秒短脉冲光参量啁啾脉冲放大中泵浦信号高精度同步主动控制技术研究*
2022-04-15李纲郭仪曾小明谢娜邵忠喜黄征孙立蒋东镔卢峰朱斌周凯南粟敬钦
李纲 郭仪 曾小明 谢娜 邵忠喜 黄征 孙立蒋东镔 卢峰 朱斌 周凯南† 粟敬钦‡
1) (中国工程物理研究院激光聚变研究中心,等离子体物理重点实验室,绵阳 621900)
2) (哈尔滨工业大学机电工程学院,哈尔滨 150001)
在皮秒短脉冲泵浦的光参量啁啾脉冲放大(ps-OPCPA)系统中,泵浦光与信号光之间的高精度时间同步是需要解决的关键问题之一.本文基于中国工程物理研究院激光聚变研究中心的全OPCPA 激光装置,对用于前端ps-OPCPA中泵浦光与信号光的高精度同步主动控制技术进行了详细研究.采用大啁啾信号光窄光谱光参量放大的主动反馈方式,通过合理设计反馈光路信号光的时域展宽啁啾系数,将泵浦光与信号光的同步时间抖动从ps 量级降低至百fs 量级的时间范围,从而极大地改善了前端ps-OPCPA 的能量和光谱不稳定性:7 min 测试时间内泵浦光与信号光相对同步时间抖动的均方根值(RMS)从458 fs 改善至93 fs,输出能量RMS 不稳定性从30.3%改善至3.15%,且维持光谱宽度大于100 nm 的稳定宽光谱输出.
1 引言
皮秒短脉冲泵浦的光参量啁啾脉冲放大(ps-OPCPA)具有高增益、超宽光谱带宽、高损伤阈值等优点,近年来越来越多的应用于大型超短超强飞秒和皮秒激光装置的前端系统中,用以获得高时域对比度的前端种子光输出[1-6].如法国Apollon 装置和欧洲极端光源ELI-NP 装置的前端采用脉冲持续时间15 ps 的Yb:YAG 作为泵浦源,可获得输出能量大于1 mJ、对比度优于10—12的种子信号光输出,信号光光谱带宽为200 nm,中心波长为800 nm[1,2];美国EP OPAL 装置采用11 ps 脉冲持续时间的Nd:YLF 作为泵浦源,通过多级脉冲光参量放大,理论上可将前端种子光对比度提升至10—16,前端参量放大输出能量为5 mJ,光谱带宽为200 nm,中心波长为910 nm[4];中国工程物理研究院激光聚变研究中心的拍瓦(PW)全光参量啁啾脉冲放大前端系统采用10 ps 脉冲持续时间的Nd:Glass 激光器作为参量放大泵浦源,信号光输出能量为2 mJ,光谱带宽为100 nm,中心波长为800 nm,然后通过多级放大最终获得10—10的高对比度4.9 PW 激光输出[5];中国上海光机所的 Xiao 等[6]于2021 年报道了8 ps/6 mJ Nd:YLF泵浦的ps-OPCPA 种子注入系统,将时域对比度提升了约40 dB,获得优于10—11的高对比度种子信号输出,信号光输出中心波长为1053 nm,带宽为40 nm,输出能量为600 μJ.
皮秒短脉冲泵浦光参量啁啾脉冲放大中需要解决的一个关键问题为泵浦光与信号光之间的时间同步问题.光参量放大过程中的皮秒短脉冲泵浦光通常由掺稀土Nd 离子或Yb 离子产生,信号光由宽带Ti:Sa 激光器产生,泵浦光与信号光之间的时间同步通常采用同源振荡器的被动式光同步技术,即泵浦光与信号光的初始种子光来源于同一个宽带Ti:Sa 振荡器[7,8].由于泵浦光与信号光需经过不同的光路后才进行参量耦合,特别是为了获得毫焦耳量级的皮秒泵浦脉冲,需要将泵浦光的种子信号进行再生和多程放大,其光程可达几十米甚至数百米[9].因此,工作环境的温度波动、光学器件的机械振动等外部因素会导致参量放大过程中泵浦光与信号光的相对延迟时间出现随机变化,严重影响参量放大过程的稳定性[10,11].鉴于此,在ps-OPCPA 系统中,除了被动的光同步技术之外,还需发展主动光同步控制技术,确保参量放大过程有效进行.尤其是随着掺Yb 介质亚皮秒脉冲激光技术的发展,泵浦脉冲宽度可被压缩至约 1 ps 至数百fs[9,12],此时发展ps-OPCPA 中泵浦光与信号光之间的主动光同步控制技术变得尤为重要.鉴于此,国外的相关研究单位如德国马普研究所、欧洲极端光源组织(ELI)等很早就已经开展了相关的研究工作[13-15].2012 年,德国马普研究所的Schwarz等[13]利用皮秒短泵浦脉冲与展宽的啁啾信号脉冲相互作用产生和频信号,基于和频信号的波长变化主动控制泵浦光与信号光之间的相对光延迟,可将泵浦光与信号光之间的残余时间抖动控制在24 fs (RMS)的范围内;2014 年,Prinz 等[14]将和频方式更改为参量放大方式,基于光参量放大的高增益特性,提高了时间同步反馈控制的灵敏度;同年,ELI 的Batysta 等[15]利用平衡光学交叉相关原理探测泵浦光与信号光之间的相对时间抖动,实现了泵浦光与信号光之间相对时间抖动小于17 fs(RMS)的控制精度.
本文基于中国工程物理研究院激光聚变研究中心的高能拍瓦OPCPA 装置[5],详细地开展前端ps-OPCPA 泵浦光与信号光高精度同步主动控制技术研究.将一束弱信号光通过高色散介质展宽至数倍于泵浦光脉冲持续时间的啁啾脉冲,对展宽的啁啾信号光进行参量放大,通过参量放大后窄光谱信号光波长的变化反馈控制泵浦光延迟光路,从而达到调节泵浦光与信号光在参量晶体中的同步时间的目的.实验中通过合理设计反馈光路信号光啁啾系数,将泵浦光与信号光的同步时间抖动从ps 量级降低至百fs 量级的时间范围,从而极大地改善了前端ps-OPCPA 的能量和光谱不稳定性.基于设计的同步主动控制系统,在7 min 测试时间内将泵浦光与信号光相对同步时间抖动的均方根值(RMS)从458 fs 改善至93 fs,最大相对同步时间抖动从1.1 ps 改善至200 fs;而输出能量RMS不稳定性从30.3%改善至3.15%,且维持光谱宽度大于100 nm 的稳定宽光谱输出.研究结果对提升OPCPA 激光装置的运行稳定性具有重要的实际意义.
2 实验装置
图1 为中国工程物理研究院激光聚变研究中心高能拍瓦OPCPA 激光装置前端系统示意图[5].如引言中所述,为了提高装置输出脉冲的时域对比度,前端系统采用皮秒短脉冲泵浦的光参量啁啾脉冲放大技术.Ti:Sa 振荡器输出中心波长为800 nm,光谱底宽为120 nm(半高宽约为60 nm),重复频率为77.76 MHz,输出功率为300 mW,脉冲宽度约为10 fs.振荡器的输出光分为两束:一束(100 mW)作为全系统的信号光,另一束(200 mW)经过光子晶体光纤(PCF)产生超连续谱,获得1053 nm 波长的泵浦光种子信号.1053 nm 的种子光经过啁啾光纤布拉格光栅进行时域展宽后,依次经过光纤放大器和钕玻璃放大器进行放大,然后通过光栅压缩器进行时域压缩.压缩后的脉冲通过KDP 晶体倍频,获得526.5 nm 的皮秒短脉冲泵浦光输出.实验中,基频(1053 nm)至二倍频(526.5 nm)的转换效率为50%,二倍频输出能量1.2 mJ,脉冲宽度被压缩至约1 ps(半高全宽).受限于钕玻璃放大器的热管理难题,当前的泵浦光运行频率为0.1 Hz.

图1 前端 ps-OPCPA 系统中泵浦光与信号光高精度同步主动控制原理图.图中:BS,分束片;PC,普克尔盒电光开关;PCF,光子晶体光纤;CFBG,啁啾光纤布拉格光栅Fig.1.Schematic of the active pump-signal synchronization for our frontend ps-OPCPA.BS:beam splitter,PC:Pockels cell,PCF:photonic-crystal fiber,CFBG:Chirped fiber Bragg grating.
信号光通过电光开关(PC)后,重复频率降为0.1 Hz,然后通过分束片BS2 分为两束,反射光进入参量放大主光路,透射光进入高精度同步主动控制的反馈光路.分束片的反射率为95%,透射率为5%.反射光(约1 nJ)作为全系统的信号光在BBO晶体中进行参量放大.BBO 晶体采用非共线走离补偿的一类相位匹配方式[16],非共线角为2.4°,相位匹配角为24°,晶体长度为10 mm.主光路信号光传输至BBO 晶体处时,由于传输光路中的分束片、电光晶体、格兰棱镜等光学元器件的色散作用(总群延迟色散约为1900 fs2),脉冲持续时间从10 fs 展宽至约340 fs(半高全宽).基于KDP 晶体倍频产生的526.5 nm 泵浦光经分束片BS3(反射率为5%、透射率为95%)分为两束,透射束经过可精密调节相对延时的光路后(如图1 所示),用于泵浦主光路参量放大BBO 晶体.透射束能量约为1.14 mJ,在参量晶体处的光束口径为5 mm (高斯分布,半高全宽),泵浦峰值强度约为4 GW/cm2.
高精度同步主动控制的反馈光路设计如下:经BS2 透射的信号光首先经过200 mm 长度的高色散SF10 玻璃(群延迟色散系数D2=171 fs2/mm)进行时域展宽.假定信号光为高斯光谱且总群延迟色散φ2较大时,展宽脉冲的持续时间 Δt近似为[17]

式中,c为光速;λ0为信号光中心波长;φ2为总的群延迟色散;Δλ为信号光光谱宽度;α为啁啾率(ps/nm).将λ0=800 nm,φ2=3.4×104fs2,Δλ=60 nm (半高全宽)代入上式,计算得到信号光的啁啾率α为0.1 ps/nm,脉冲宽度 Δt=6 ps(半高全宽).展宽后的信号光通过BBO 晶体进行参量放大,BBO 晶体参数与主光路的BBO 晶体参数一样.泵浦光能量约60 μJ,在参量晶体处的光束口径为2 mm(高斯分布,半高全宽),泵浦峰值强度约为1.3 GW/cm2.由于泵浦光脉冲持续时间约为1 ps,信号光被展宽为6 ps(啁啾率为0.1 ps/nm),当反馈光路参量放大输出中心波长(或峰值波长)变动 Δλc时,根据图1 所示的实验原理图,主光路泵浦光与信号光的相对延时时间(即同步时间) Δτ变化为 Δτ≈αΔλc.比如当反馈光路中心波长λc变动1 nm 时,主光路泵浦光与信号光的同步时间变动约为100 fs.利用光谱仪(HR4000)测量反馈光路信号光输出波长变化,将波长变化转换为主光路泵浦光与信号光的同步时间抖动,通过程序控制高精度步进电机的运动,从而对主光路泵浦光与信号光的同步时间抖动进行主动补偿控制.
3 反馈光路时域展宽啁啾系数设计分析
根据前述的实验方案,反馈光路信号光时域展宽啁啾系数的选择将决定主光路泵浦光和信号光之间的同步时间控制精度.根据关系式 Δτ≈αΔλc,在相同的同步时间控制精度 Δτ下,啁啾率α设计越大,反馈光路的波长变动 Δλc就越小,即对光谱仪的分辨率以及波长变化的识别要求就越高;相反如果α设计过小,则反馈光路信号光时域展宽较小,即光谱成分局域在较小的展宽时间范围内,使得反馈光路参量放大输出光谱较宽,同样不利于中心波长(或峰值波长)变动的识别,从而降低同步时间控制精度(尤其当泵浦脉冲具有复杂的时域结构时,参量放大光谱也具有复杂的光谱结构,更不利于波长变动的识别).为了分析同步时间变动对主光路信号光输出光谱及能量的影响,以及判断在当前实验条件下,同步时间需控制在多大范围内时,才能获得较为稳定的信号光输出,采用光参量放大耦合波方程对皮秒短脉冲泵浦光参量啁啾脉冲放大进行数值模拟.皮秒短脉冲泵浦光参量放大耦合波方程为[18]
式中,As,Ai,Ap分别为信号光、闲频光、泵浦光时域复振幅;k(n)为n阶色散系数;ωm(m=s,i,p)为角频率;deff为有效非线性系数;nm(m=s,i,p)为折射率;c为真空中光速;Δkkp-ks-ki为相位失配因子(km(m=s,i,p)为光波波矢).通常情况下,泵浦脉冲光谱较窄,参量晶体端面处的时域复振幅可直接表示为
式中,τp泵浦光脉冲持续时间(半高全宽:FWHM);Ip0为泵浦光峰值强度;ε0为真空介电常数.信号光由于光谱宽度较宽(底宽 >100 nm,半高宽约60 nm),必须考虑光传输过程中的脉冲时域展宽效应.当传输光路的总群延迟色散较大,即展宽脉冲持续时间远大于傅里叶变换极限脉冲时(实验中主光路信号光经过4.2 mm 厚度熔石英分束片一块、15 mm 厚度石英晶体格兰棱镜两块,以及20 mm 长度的DKDP电光晶体一块,总群延迟色散φ2s约1900fs2.根据(1)式Δt≈(2πc/λ02)φ2sΔλ的变换关系,信号光被展宽至约340 fs,满足展宽脉冲持续时间远大于傅里叶变换极限脉冲持续时间的条件),忽略传输光路的高阶色散效应后参量晶体端面处的信号光时域复振幅可以近似表示为[19]
式中,Is0为信号光峰值强度;τs为信号光脉冲持续时间;τ为信号光相对于泵浦光的同步时间抖动(τ>0 时,信号光延迟于泵浦光;τ<0 时,信号光超前于泵浦光),φ2s为传输光路总群延迟色散.
数值模拟中的注入泵浦光强度、信号光强度、脉冲持续时间、信号光初始群延迟色散等参数与实验参数一致,模拟参数如下:泵浦光峰值强度Ip0=4 GW/cm2,脉冲宽度τp=1 ps;信号光峰值强度Is0=1×10—6GW/cm2,脉冲宽度τs=340 fs,群延迟色散φ2s=1900 fs2;参量晶体BBO 长度为10 mm,相位匹配角为24°,非共线角为2.4°,有效非线性系数deff=2 pm/V.数值模拟采用分步傅里叶变换方法求解,即在时域空间求解非线性参量耦合,而在频域空间考虑色散效应[18].不同延迟时间τ下的模拟结果如图2 所示.
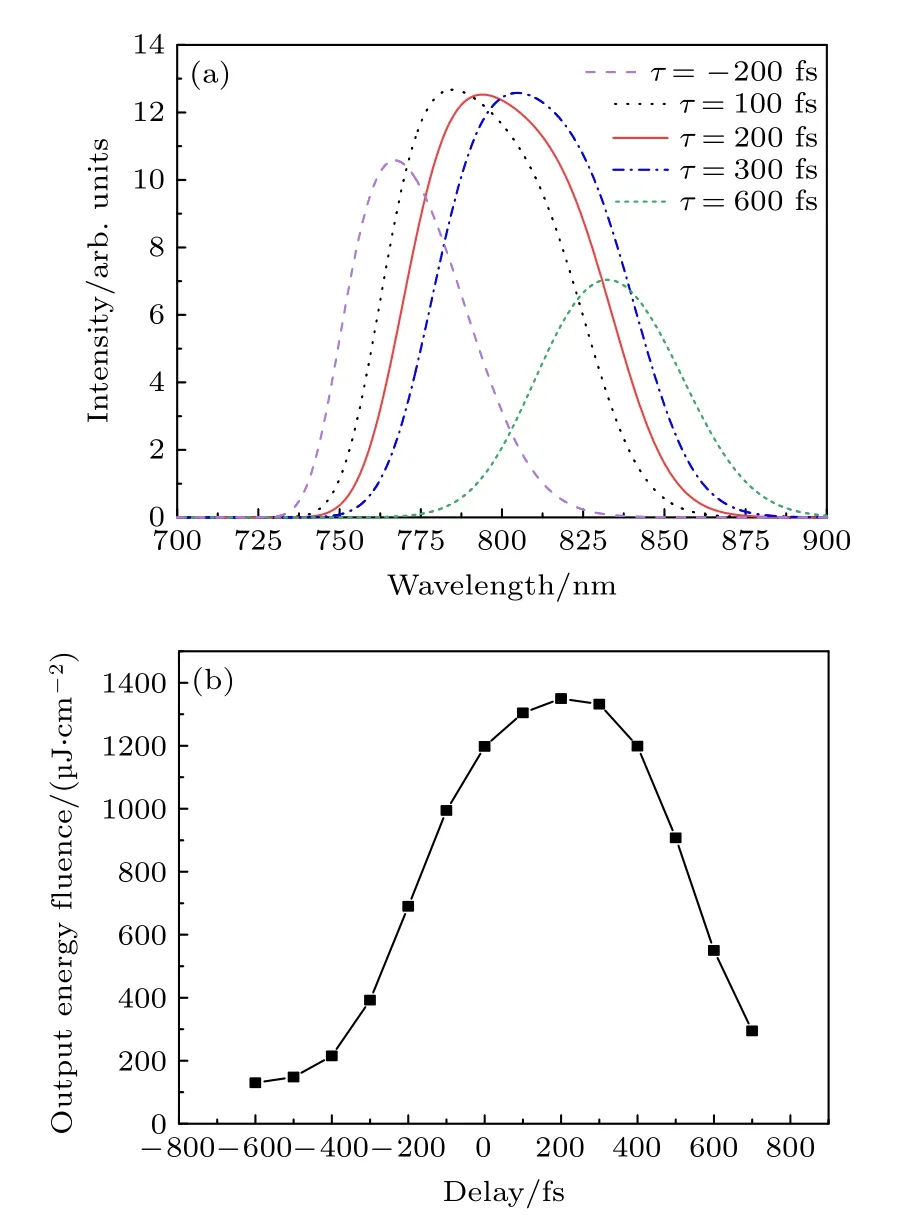
图2 数值模拟泵浦光与信号光同步时间对信号光 (a)输出光谱以及(b)输出能流的影响Fig.2.Numerical simulation the influence of pump-signal synchronization on the (a) signal output spectrum and (b)energy fluence.
由图2 可见,信号光在晶体入射端面处相对于泵浦光初始延迟200 fs 时(即图中的τ=200 fs),信号光具有最大输出能流,且光谱底宽超过100 nm(图2(a)中的红色实线).这是由于信号光在BBO晶体中的群速度大于泵浦光群速度,因此在入射晶体端面处信号光延迟于泵浦光,可以确保信号光和泵浦光在参量晶体中具有更长的参量耦合长度,从而提高参量转化效率.以初始延迟τ=200 fs 作为参考点,当同步时间变动超过400 fs 时(图2 中的τ=600 fs和τ=— 200 fs),光谱宽度明显变窄,且输出能流降低幅度超过50%.从图2 可见,将同步时间控制在±100 fs 的时间范围内时,光谱宽度无明显变化,且能获得较为稳定的能流输出.为了减小反馈光路输出波长变化的识别误差,提高同步时间反馈控制精度,反馈光路波长变化 Δλc设计为1 nm,根据同步时间控制精度 Δτ、啁啾率α、以及反馈光路波长变化 Δλc之间的相互关系Δτ≈αΔλc,将 Δτ=100 fs,Δλc=1 nm 带入可得α=0.1 ps/nm.在根据(1)式,反馈光路的总群延迟色散约需3×104fs2,因此反馈光路采用200 mm 长度的SF10 玻璃进行时域展宽.
需要注意的是,在理想的高斯泵浦脉冲及信号脉冲下,由于信号光的正啁啾特性(φ2s>0,低频光子位于脉冲前沿,高频光子位于脉冲后沿)[17],由图2 的数值模拟结果可见,当信号光延迟于泵浦光时,信号光输出峰值波长向长波移动(图2(a)中的τ=600 fs);而信号光超前于泵浦光时,峰值波长向长波移动(图2(a)中的τ=—200 fs).然而实际情况中,泵浦脉冲并非理想的高斯脉冲,时域结构由于泵浦系统自身的非线性效应可能非常复杂,且可能具有较强预脉冲或尾脉冲[20],因此在实际应用中无法通过主光路信号光输出光谱峰值波长的移动,判断信号光是超前还是延迟于泵浦光.从第4 节的实验结果分析与讨论可知,基于反馈光路的大啁啾信号光窄光谱参量放大,可很好的解决这一判断难题.
4 结果分析与讨论
反馈光路控制程序不运行时,主光路参量放大输出能量如图3 所示.从图3 可见,主光路参量放大输出能量存在剧烈波动,能量波动范围从15 μJ至最大170 μJ,波动RMS 值不稳定性为30.3%.相应的输出光谱如图4 所示.图4(a)为输出能量位于峰值,即对应图3 中的发次3,15和25 时ps-OPCPA 的输出光谱形状;图4(b)为输出能量位于谷值,即对应图3 中的发次6,21和32 时ps-OPCPA 的输出光谱形状.从图3和图4 可知,能量波动和光谱波动存在对应关系,波动原因主要来源于泵浦光和信号光之间的同步时间变化.分析如下:图3和图4(a)中的发次3,15和25 对应泵浦光和信号光同步时间匹配较好的情况,此时ps-OPCPA 具有较高的能量转换效率,同时获得较宽的光谱宽度输出,光谱底宽可达100 nm(光谱底宽740—840 nm),且光谱形状较为稳定.由图4(b)可知,发次6 的输出光谱宽度出现窄化,相对于图4(a)的光谱缺少820 nm 的长波部分,且780 nm 波段附近出现凹陷,光谱强度也远小于其他发次;发次32 的输出光谱窄化至约60 nm(光谱底宽740—800 nm),相对于图4(a)的光谱形状缺少大于800 nm 的长波部分;发次21 的输出光谱宽度同样相对于图4(a)的光谱出现窄化,但光谱形状缺少小于760 nm 的短波部分.前面已经介绍,主光路的信号光传输至BBO 晶体处时,由于传输光路中的分束片、电光开关、格兰棱镜等光学元器件的色散作用,脉冲持续时间从10 fs 展宽至约340 fs 的正啁啾激光脉冲,即长波位于脉冲前沿,短波位于脉冲后沿[17].根据参量放大过程的瞬时特性,当泵浦光和信号光之间的同步时间出现抖动时,信号光输出光谱和输出功率均会出现相应的变化[21].然而正如第3 节所述,由于缺乏泵浦脉冲时域结构的准确信息(实验中泵浦光脉冲持续时间通过二阶自相关仪测量,而二阶自相关无法给出脉冲时域形状的准确信息[22]),因此仅基于图4 的光谱变化情况,无法准确判断泵浦光相对于信号光是延时还是超前.
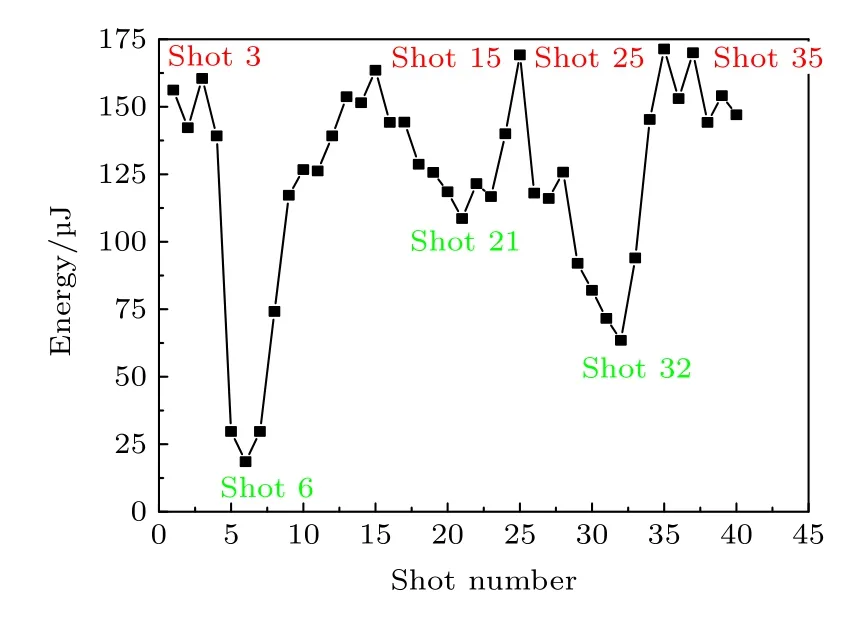
图3 同步主动控制回路不工作时ps-OPCPA 输出能量波动情况Fig.3.Energy fluctuation of the ps-OPCPA when the active pump-signal synchronization is not working.
对应于图3和图4,反馈光路的输出光谱变动情况如图5 所示.从图5 可见,发次3,15和25 的峰值波长稳定在(779 ± 0.2) nm,此时主光路ps-OPCPA 具有最大输出能量和最宽的光谱宽度,即泵浦光和信号光同步时间匹配较好的情况.发次6和发次21 的输出峰值波长向长波移动,峰值波长分别为790.68 nm和783.93 nm,相对于778.92 nm的参考波长分别移动11.76 nm和5.01 nm.根据信号光啁啾率α=0.1 ps/nm,可知发次6 中泵浦光与信号光的同步时间变化为1.1 ps,发次21 的同步变化时间为500 fs.发次32 的峰值波长向短波移动,峰值波长为773.16 nm,相对778.92 nm的参考波长变化5.76 nm,因此同步时间变化为570 fs.显然同步时间的变化满足:发次6>发次32>发次21,使得主光路ps-OPCPA 的输出能量满足:发次6<发次32<发次21,符合图3 的能量输出变动情况.鉴于反馈光路的信号光设计有较大的正啁啾率,脉冲持续时间数倍于泵浦光,且长波位于脉冲前沿、短波位于脉冲后沿[17],因此发次6和发次21 的峰值波长向长波移动,意味着泵浦光光程缩短(假设信号光光程不变),时间提前,从而对信号光的长波进行放大;而Shot 32 的峰值波长向短波移动(773.2 nm),意味着泵浦光光程增加(假设信号光光程不变),时间延后,因此对信号光的短波进行放大.从图5 的实验结果可见,基于反馈光路的大啁啾信号光窄光谱参量放大,可以对泵浦光与信号光的相对延时抖动范围和抖动方向进行准确判断,从而为高精度同步主动控制提供一种可靠的反馈信号.
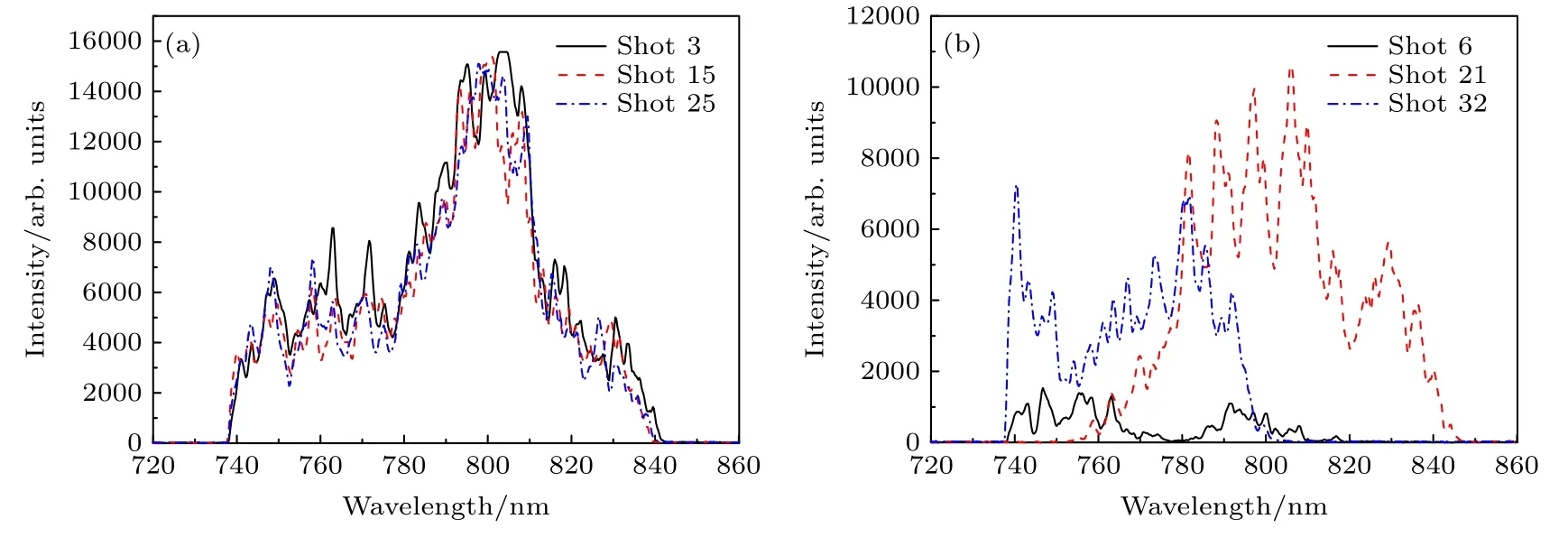
图4 同步主动控制回路不工作时ps-OPCPA 输出光谱变化情况Fig.4.Spectral evolution of the ps-OPCPA when the active pump-signal synchronization is not working.
反馈光路输出峰值波长与主光路输出脉冲能量的对应关系如图6(a)所示,图6(b)为以778.92 nm(图5(b))为参考波长,计算的泵浦光与信号光相对同步时间抖动.由图6(a)可见,利用反馈光路峰值波长的变动情况,将波长锁定在(779±1) nm的范围,根据反馈光路的啁啾系数大小,可将主光路泵浦光与信号光的同步时间抖动控制在±100 fs 的时间范围内,从而改善ps-OPCPA 输出能量及输出光谱的稳定性.第3 节的理论模拟也表明,在当前的实验参数下,将泵浦光与信号光的同步时间抖动控制在±100 fs 的时间范围内,可获得较为稳定的信号光输出.因此实验结果与理论分析一致.注意反馈光路的锁定波长(即参考波长)可通过调节反馈光路泵浦光与信号光之间的相对延迟时间进行改变.而由图6(b)可见,主光路泵浦光与信号光的最大相对同步时间抖动可达1.1 ps,RMS 值458 fs.
根据以上的实验结果,设计的泵浦光与信号光同步时间自反馈主动控制流程及控制界面分别如图7(a)和图7(b)所示.控制程序设置反馈光路的目标波长(参考波长),根据反馈光路输出波长与目标波长之差 Δλc计算主光路所需调节的光程距离,且根据 Δλc的正负可判断光程移动方向,从而实现泵浦光与信号光同步时间抖动的自动补偿.图7(b)所示的控制界面中反馈光路的目标波长设置为803 nm,调节偏差±1 nm,高精度平移台调节步长系数设置为15 μm/nm (对应的光程变化为30 μm/nm),即当波长变动1 nm 时,泵浦光与信号光的同步时间变动约100 fs.高精度平移台采用永磁同步交流伺服电机,最小步进距离<1 μm,重复定位精度<5 μm.
同步主动控制系统工作时,主光路ps-OPCPA的输出能量和输出光谱分别如图8和图9 所示,能量输出不稳定性相对于同步主动控制不工作时的30.3%(RMS)提升至3.15%(RMS),且维持较为稳定的光谱形状,光谱底宽大于100 nm,如图9 所示.为了匹配激光装置后级放大对注入光谱的需求,在实验中通过调节参量放大的相位匹配角,使得ps-OPCPA 的输出光谱具有如图9 所示的形状,同时最大输出能量相对于图3 的170 μJ 降低至125 μJ.鉴于当前ps-OPCPA 的运行频率仅为0.1 Hz,因此锁定波长的调节偏差设置为±1 nm 的较大范围;提高系统的运行频率,相应地可将锁定波长调节偏差进一步降低,即进一步提高泵浦光与信号光之间的时间同步精度.图8 还给出了在自反馈同步主动控制工作的状态下,主光路泵浦光与信号光相对同步时间的抖动情况.尽管在实验中设置±1 nm的波长调节偏差理论上将同步时间控制在±100 fs的时间范围,然而反馈光路的运行频率受限于泵浦光运行频率(0.1 Hz),只能对泵浦光与信号光同步时间抖动的慢变化进行延迟反馈(即基于当前发次的波长偏移量对下一发次进行光程调节),而对同步时间抖动的快变化无法响应,使得最大同步时间抖动会超过理论值100 fs 较大的数值.从图8 可见,在自反馈同步主动控制系统工作时,主光路泵浦光与信号光最大相对同步时间抖动为200 fs,远低于图6(b)的1.1 ps,而RMS 值从458 fs 改善至93 fs,证明即使在当前0.1 Hz 的低频率运行状态之下,自反馈同步主动控制仍然有效.图2 的数值模拟结果也表明200 fs 的同步抖动仍在可接受的范围之内.因此提高泵浦光的运行频率,同时配合文中发展的泵浦光与信号光主动同步控制技术,可极大地提高ps-OPCPA 的运行稳定性,从而提高整个激光装置的运行稳定性[23].

图8 同步主动控制回路工作时ps-OPCPA 的输出能量及泵浦光与信号光之间的相对同步时间抖动Fig.8.Output energy of the ps-OPCPA and relative time jitter between pump and signal when the active pump-signal synchronization is working.
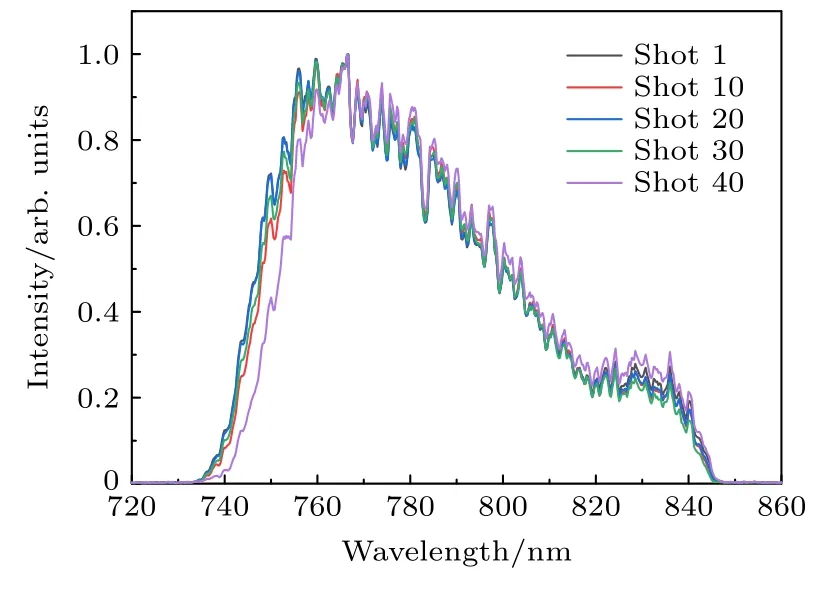
图9 同步主动控制回路工作时ps-OPCPA 稳定的光谱输出Fig.9.Output of stable spectra for the ps-OPCPA when the active pump-signal synchronization is working.
信号光的输出光束形貌如图10 所示,其中图10(a)为不加载泵浦光时信号光的光束形貌,图10(b)为参量放大输出100 μJ 能量时信号光的光束形貌.图10(b)的光束形貌与实验中的泵浦光光束形貌基本一致.在我们的实验中,为了减弱光束走离效应对信号光光束质量的影响,参量放大采用非共线走离补偿的一类相位匹配方式,泵浦光在BBO 晶体中的走离角为3.3°,走离方向向光轴靠拢[16].泵浦光波矢与信号光波矢之间的非共线角为2.4°,考虑泵浦光的走离角及走离方向后,泵浦光与信号光坡印廷能流之间的夹角为0.9°.因此泵浦光与信号光通过10 mm 长度的BBO 晶体后,在空间上的分离距离为0.16 mm,远小于5 mm 的泵浦光光束口径.从以上的分析可知,走离效应对信号光光束质量的影响几乎可以忽略,信号光的光束质量主要由泵浦光光束质量决定[21].
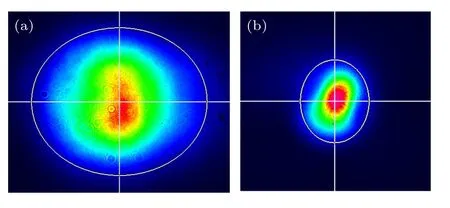
图10 信号光输出光束形貌 (a)不加载泵浦情况下;(b)信号光输出能量100 μJ 能量下Fig.10.Signal beam profile:(a) without pump;(b) under 100 μJ output energy.
5 结论
本文对用于皮秒短脉冲泵浦光参量啁啾脉冲放大(ps-OPCPA)系统中泵浦光与信号光之间的高精度时间同步主动控制技术进行了详细研究.研究表明,受限于当前ps-OPCPA 泵浦光较低的运行频率(0.1 Hz),泵浦系统无法达到热平衡状态,使得泵浦光与信号光的同步时间出现周期性的剧烈抖动,抖动时间可达1 ps 以上,严重影响ps-OPCPA 的能量及光谱稳定性,7 min 测试时间内的能量波动可达30.3%(RMS).基于本文发展的高精度时间同步主动控制技术,采用大啁啾窄光谱光参量放大的主动反馈方式,通过合理设计反馈光路信号光的时域展宽啁啾系数,将泵浦光与信号光的同步时间抖动从ps 量级降低至百fs 量级的时间范围,从而极大地改善了前端ps-OPCPA 的能量和光谱稳定性:7 min 测试时间内泵浦光与信号光的相对同步时间抖动RMS 值从458 fs 改善至93 fs,最大同步时间抖动从1.1 ps 降低至200 fs,输出能量RMS 不稳定性从30.3%改善至3.15%,且维持光谱宽度大于100 nm 的稳定宽光谱输出.结果表明即使在当前0.1 Hz 的低频率运行状态之下,自反馈同步主动控制仍然有效.研究结果对提升OPCPA 激光装置的运行稳定性具有重要的实际意义.
