一种基于交通雷达的交通拥堵与交通事故判别方法
2022-04-15刘大学
刘大学











摘要 文章以交通雷达技术为研究背景,通过交通雷达的相关特征参数,结合相关交通拥堵判定决策算法,构建了城市道路交通拥堵和交通事故判定评价实验系统。以实际道路雷达数据进行实验,处理得到的平均车速、车流量与实际基本相符。经统计得到四级交通拥堵分布图,显示该文方法判别结果比模糊综合判别法更准确。
关键词 交通拥堵;交通事故;雷达;模糊综合判别
中图分类号 U491.3 文献标识码 A 文章编号 2096-8949(2022)07-0075-04
0 引言
随着经济快速发展,人们对出行质量的要求越来越高,城市交通建设随之不断进步,道路干线网络不断完善,机动车数量大幅攀升,过多车辆行驶导致交通拥堵,进而导致交通事故以及交通违章现象频发[1]。城市交通干道上出现交通事故后,如不及时上报警讯并移动车辆,就会因事故车辆占道导致道路拥堵[2]。出现交通事故后,如没有实施有效的处理,又会导致交通拥堵以事故发生地为圆心向外辐射,逐渐蔓延至周边交叉路口,引发更加严重的拥堵,严重影响过路车辆的通行效率[3]。因而在城市道路交通运行中,需要对突发交通事故进行实时监测,从而提高交通事故处理的效率,缩短拥堵时间,对缓解因交通冲突造成的交通拥堵具有重大意义[4]。根据道路状态信息,运用雷达系统恰当融入交通参数计算方法,构建融城市道路交通流参数检测、交通状况判定和交通事故判别为一体的完整系统,可以极大地缓解城市交通拥堵[5]。该文据此对交通擁堵与交通事故的判别方法进行了研究。
1 交通雷达检测系统原理
在电磁波传播过程中,由于接触到物体而产生反射回弹。电磁波的振幅和频率会因接触到物体不同而出现差异。且该差异情况还会随物体的运动状态发生变化。倘若物体处于相对静止状态,所回弹的电磁波振幅和频率将会保持恒定;倘若物体处于相对运动状态,就会导致电磁波出现压缩反射现象,致使电磁波频率增大。该电磁波频率会随着物体的运动而产生变化,离电磁波发源地距离越远,频率越低。因此可将交通雷达监测系统运用于交通违章和交通事故的判定。
交通雷达采用阵列式结构,覆盖城市道路交通干道进行检测识别,并且对过往车辆的行驶状态加以检测,从而得到每台车辆的行驶速度、车头时速等参数。车辆在行驶过程中,与交通雷达之间的关系可以通过二者距离来呈现。二者距离与发射、反射电磁波的差值呈正相关,即距离越大差值越大。因而可以借此对车辆所处车道加以区分,使用滤波器进行识别。图1所示为微波束投影横截面图。
2 基于交通雷达的交通拥堵与交通事故的判别
2.1 交通实时检测
通过雷达与高清摄像头关联,一旦发生交通事故或车辆违章现象均可以通过对事发车辆进行拍照和交通雷达检测,最大限度提高交通事故处理的效率[6]。即通过对过路车辆发射雷达电磁波,而后收集检测由车辆反射回来的雷达电磁波频率,继而将电磁波信号转化成雷达信号进行表达,按照实际车辆比例,将实际道路设施、道路渠化等与雷达匹配。进行坐标覆盖,从而对排队长度、交通流量、占有率等交通参数进行检测。但是由于交通雷达所采集到的电磁波信号需要经过处理,才可以转化为车辆行驶的其他交通参数,所以针对某一时刻的车辆信息具有一定的滞后性。为了将雷达检测结果和车辆运行时刻统一,通过公式(1)进行计算:
(1)
式中,——光感系统检测到数字信号所消耗的时间(s);——数据处理消耗的时间(s);——数据传输消耗的时间(s)。
2.2 交通事故检测
交通事的故复杂性、多源性使得交通冲突仿真具有极大的不确定性[7]。当两个或两个以上交通实体发生碰撞,雷达会将运行实体的轨迹检测出,可识别是否发生交通事故。而后可以通过车辆的运行状态和雷达所接收到的反射电磁波频率来识别发生交通事故车辆为相对运动实体,在雷达上进行显示。在发生事故时,会有车辆间碰撞接触,也可进行识别。图2为区域性障碍雷达显示示意图。
2.3 拥堵判定
在发生交通事故后,雷达通过检测对区域性障碍位置进行确定,并对事故发生位置、占据车道情况进行精确判别。而后可以通过雷达反馈回的电磁波信号,通过拥堵方向、车辆时速、在车道停止线位置的不同、该城市交通干线车辆汇入率和拥堵方向的消散率之间的关系,来判断该交通干道是否发生拥堵现象[8]。拥堵方向消散率的定义为:拥堵方向单位时间内通过事故发生地的车辆数,具体见公式(2)。
(2)
式中,——拥堵方向车辆消散率;——第条拥堵进口道车辆经停车线处车头时距(s);——第条拥堵进口道方向绿灯时间(s);——事故发生地拥堵方向岔路口信号周期(s)。
其中,消散率与进口道车辆经停车线处车头时距成反比,与车道数、信号放行时间成正比。第条车道方向绿信比,因此,。
定义为拥堵方向单位时间汇入车辆数为拥堵方向汇入率,,其中,——交通拥堵上游交叉口信号周期(s);——汇入拥堵方向车道车辆数(veh)。
当出现交通拥堵点后,根据拥堵方向汇入率及消散率的关系可知:在时,也就是拥堵方向汇入率要比消散率小,表明拥堵点处排队车辆会消散。当,也就是拥堵方向汇入率与消散率相等,拥堵地点排队车辆数量将会保持恒定不变,但是拥堵现象并不会对外蔓延。当,即代表了拥堵方向汇入率小于消散率,拥堵排队车辆不仅会越来越多,甚至会出现更加严重的趋势,并向外蔓延。
3 基于雷达处理交通特征参数的选取
判断交通道路是否出现拥堵现象,最重要的识别因素是交通特征参数,因而需要选取合适的特征参数进行识别和分类判定。使用最为广泛的交通特征参数有车速、车流量、交通密度、占有率、车头时速、排队长度、车头间距等。但由于经常出现车辆遮挡现象,难以对车头间距、排队长度和车头时速等参数进行计算,而交通密度的计算方式又十分复杂。该文的研究中选取速度、车流量、路面占有率作为判定该路段是否拥堵的重要决策变量。
3.1 基于雷达处理交通特征参数的检测方法
3.1.1 路面占有率
在进行道路占有率计算时,基本参数的设定为前提要素。可以使用手工方式对路面信息进行提取,设置雷达监控范围的面积为area,左边车道用lroadway1表示,路面占有率ratioroadl用公式(3)计算:
(3)
式中,heighti——第个车辆在图像中所占面积,M——车辆信息链表长度。通过公式(4)计算右边车道占有率:
(4)
3.1.2 车速计算
相邻两帧为、;相邻帧间隔时间为。在计算车速时,先从雷达序列中依次取出图像,图像中读取的第辆车质心用表示;在相邻帧中,将第辆车所对应的位置进行识别找出,而后采用跟踪算法来把第辆车在帧中的位置找到,并对该帧中车辆的中心进行计算,记为;在中,第车辆速度为,。
3.1.3 车流量计算
对于车流量的计算过程可以和车速计算过程并列到一起,车速的计算则是需要记下帧中的位置和帧中的位置,统计与间的车辆个数,可以得到车流量为。
3.2 特征参数与交通状态的关系
根据车辆的类型差异和不同交通道路的类型进行调整,从而得到表1中所展示的各级交通拥堵状态与特征参数的关系。
3.3 模糊综合评判方法
根据表1,可获得交通拥堵等级和道路交通特征参数间的模糊隶属矩阵,通过模型,可获得矩阵B:
(5)
式中,——ID号为的车辆,第个因素对第个模糊语言子集隶属度,其中,语言变量分别表示小、中、大,即。
(6)
式中,。
,其中,表示ID号为的车辆对个状态模式隶属度。
图3为交通拥堵判别算法流程图。因拥堵预判别只采用速度变量划分,不能对道路情况进行完全描述。因而,会有产生权重计算结果和预判结果不符合的现象[9]。出现这种现象时,表明该交通道路判别拥堵状态产生误差,需要更换权重参数指标进行重新计算,并进行判定。
3.4 实验算法流程
该文利用杭州市某道路旁的雷达数据进行实验,其中计算机配置CPU为i3,内存为4 GB,处理器主频为1.9×
2 GHz。图4为基于雷达处理的城市道路交通拥堵判别算法流程图。
表2为雷达获取交通特征参数与实际获取交通特征参数对比。而后再根据数据进行人工统计计算,最终得到实际车流量、车速数据。因道路占有率为不易实际计算的量,因此未进行数据对比。
由表2可知,雷达处理得到的平均车速基本符合实际的平均车速,道路在31 s、41 s、51 s中比较通畅,道路占有率突然增大。通过观察,发现雷达中有体积较大车辆出现,在路况较畅通时,占有率升高,不同于111 s、121 s因为路况,由于该时段路段出现车辆体积较大,出现车辆完全遮挡的现象,导致出现车流量降低的错误判断。实际获取车流量和雷达检测获取车流量基本相同。
4 交通拥堵判别算法实验结果分析
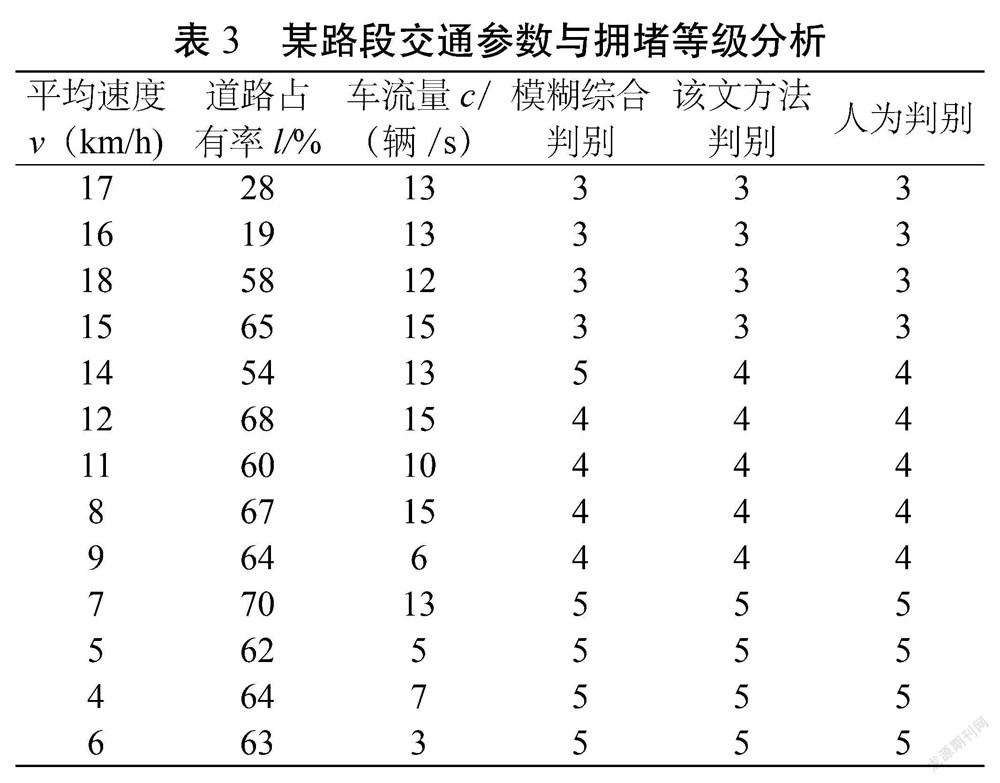
该文采用杭州市某路段雷达数据进行实验验证。由表3可知,在同一时段中,该路段开始交通拥堵状态为一般,随着时间的增长,就出现了十分拥堵的现象,虽然拥堵情况出现了缓解,但是依旧判定为Ⅲ级拥堵状态,须提醒车辆绕道行驶。
如图5所示,将实验数据和观测数据进行对比,通过该文方法判别、模糊综合判别、人为判别进行统计,得到四级交通拥堵分布数据。人为判别和该文方法数据更为接近,判别结果要比模糊综合判别结果准确。
5 结论
该文基于交通雷达进行交通拥堵与交通事故判别方法研究,得出如下结论:
(1)将电磁波信号转化成雷达信号进行表达,按照实际车辆比例,将实际道路设施、道路渠化等与雷达匹配。选取速度、车流量、路面占有率作为判定该交通路段是否出现拥堵现象的重要决策变量。
(2)该文构建了基于交通雷达的城市道路交通拥堵现象判定评价实验系统,以杭州市某一主线道路所收集到的雷达数据进行实验,雷达处理得到的平均车速基本符合实际平均车速,实际获取车流量和雷达检测获取车流量基本相同。
(3)通过该文方法判别、模糊综合判别、人为判别进行统计,得到四级交通拥堵分布数据,人为判别和该文方法数据更为接近,判别结果比模糊综合判别结果准确。
参考文献
[1]陈昊, 陆建. 基于VISSIM仿真的高速公路事故交通影响[J]. 长安大学学报(自然科学版), 2015(S1): 226-229.
[2]王进展, 曲大义, 曹俊业, 等. 基于多普勒雷达交通实时监控的交通冲突判别技术研究[J]. 科学技术与工程, 2016(32): 308-313.
[3]Zhang F, Knoll A. Vehicle detection based on probability hypothesis density filter[J]. Sensors, 2016(4): 510-523.
[4]张宙元, 余稳, 孙芸, 等. 应用于交通信息检测雷达的阵列天线设计[J]. 现代雷达, 2011(4): 67-70+75.
[5]史殿习, 丁涛杰, 丁博, 等. 一种基于非参数回归的交通速度预测方法[J]. 计算机科学, 2016(2): 224-229.
[6]杨思琪. 高速公路交通擁堵状况预测模型的研究与应用[D]. 广州: 华南理工大学, 2017.
[7]孔栋, 王晓原, 刘亚奇, 等. 基于车载32线激光雷达点云的车辆目标识别算法[J]. 科学技术与工程, 2018(5): 81-85.
[8]左家骏, 杨瑞娟, 李晓柏, 等. QAM-OFDM雷达通信一体化信号雷达性能研究[J]. 现代雷达, 2020(8): 1-5.
[9]陈丹, 胡明华, 张洪海, 等. 基于贝叶斯估计的短时空域扇区交通流量预测[J]. 西南交通大学学报, 2016(4): 807-815.