基于无人机LiDAR系统的坝控流域地貌形态和侵蚀分区的提取
2022-04-13董彦丽杨世君高钰婷刘原峰
董彦丽,杨世君,高钰婷,李 景,马 涛,刘原峰
(1.甘肃省水土保持科学研究所,甘肃 兰州 730020;2.兰州交通大学土木工程学院,甘肃 兰州 730070)
0 引 言
地貌形态是影响土壤侵蚀的一个关键因素,坡度、坡向等地形地貌特征的提取主要基于DEM[1-2]和遥感影像[3]。在大尺度区域进行地貌形态的分析研究多是基于航空影像,而针对小尺度区域的研究则越来越多地依靠无人机航测技术,其既可快速生产出高精度DEM和影像数据,又降低了外业劳动强度。无人机LiDAR系统是一种将无人机与LiDAR的优势相结合形成的无人机载LiDAR系统,能灵活起降、低空飞行及快速获取数据,不受特殊地域限制,可同时穿透植被,获得探测目标的距离、坡度、粗糙度和反射率等高精度的三维坐标点云数据和影像数据[4-5],真实地反映地表信息。近年来,国内外研究者利用无人机LiDAR在各个领域做了很多相关研究,如利用该技术开展沙丘特征线自动提取的算法研发[6],对采煤塌陷区进行立体监测[5],应用无人机激光点云估测林木有效叶面积指数[7]、在潮间带开展地形测量[8]等应用研究。
在黄土丘陵沟壑区,坡度、坡向、坡位是影响土壤侵蚀的主要地形因子[9],控制着坡面降雨径流方向。淤地坝控制区是一个独立的小流域,坝形态和土壤侵蚀类型都影响着沟道泥沙及水流走向。利用高精度DEM和影像数据提取小区域范围内的相关地貌参数,进行地貌的定量指标分析和多维度、精细化、全方位的区域地貌特征分析,更好地服务于土壤侵蚀学科的精确化研究[1]。本研究针对黄土丘陵沟壑区淤地坝控制面积较小的区域,利用无人机LiDAR系统,获取研究区三维点云数据和可见光影像数据,生成高分辨率DEM和DOM,分析地貌形态特征,划分坝控流域侵蚀分区,以期为淤地坝坝控区水土流失监测提供精确的数据支撑。
1 无人机激光雷达系统
无人机激光雷达系统主要配备激光扫描仪、高精度全球导航卫星系统&惯性测量单元(GNSS &IMU)和光学相机等载荷。激光扫描仪用于获取地物的三维点云数据,高精度GNSS&IMU提供姿态和位置信息用来解算激光点三维位置,光学相机用于地物类型识别及结构信息提取[10]。本研究使用TS-600无人机激光雷达系统获取地面三维激光点云数据和可见光影像数据。TS-600飞行平台参数如表1所示。RIEGL VUX-1LR激光扫描仪参数如表2所示。

表1 TS-600飞行平台参数
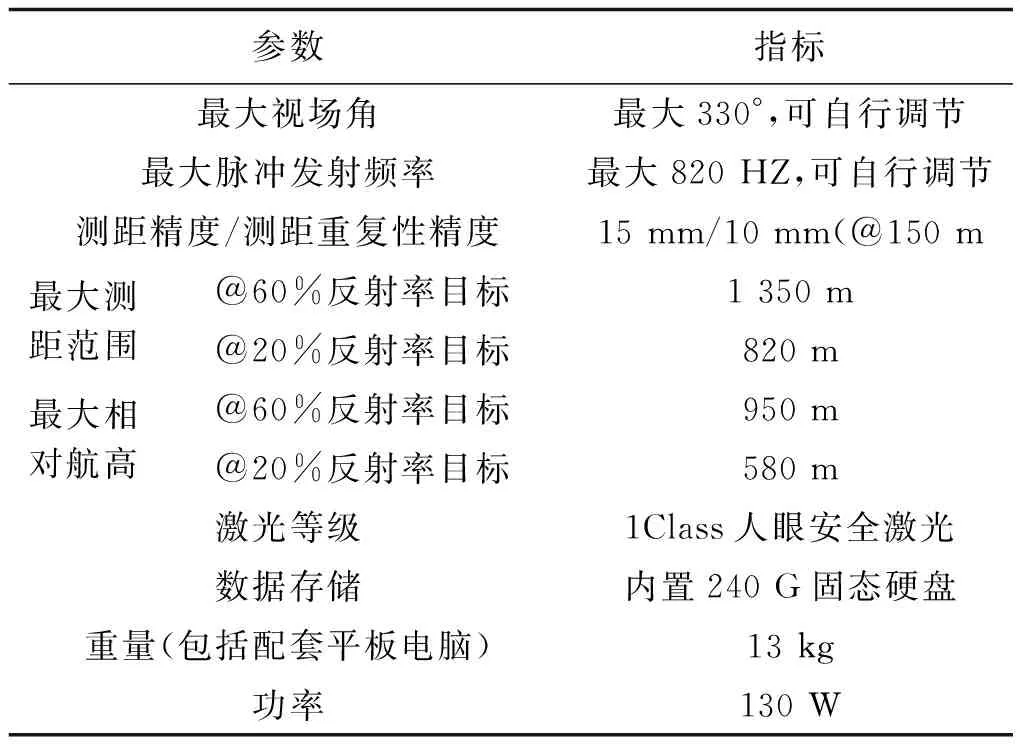
表2 RIEGL VUX-1LR激光扫描仪技术参数
2 无人机激光雷达测量原理和方法
2.1 无人机激光雷达测量原理
无人机激光雷达系统可通过动态差分GPS接收机获取激光发射瞬间的位置信息,根据IMU导航定位获得飞行的姿态数据,以及通过激光扫描装置记录脉冲往返时间进而求解激光脚点至参考点间距。结合上述数据所在的坐标系及对应转换关系,按照空间三角测量的原理,求出目标点三维坐标信息。
图1中G点为激光扫描仪投影中心,位置信息由差分GPS提供;(ψ,ω,κ)为飞行姿态参数,分别代表俯仰、翻滚及偏航;M点为待求的目标点位置,基于该图进行目标点位置解算的计算公式如下:
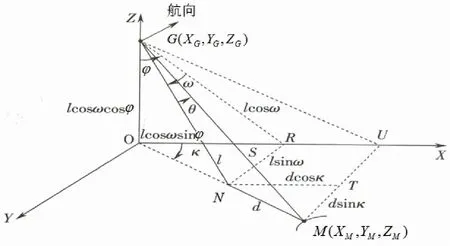
图1 无人机激光雷达测量原理示意图
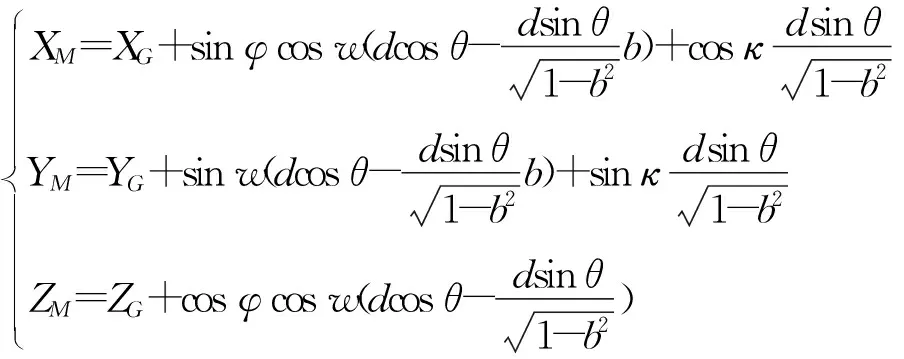
(1)
式中,b=sinψcosωcosκ+cosωsinκ,将b带入公式(1)即可获取目标点M点的三维信息[11]。
2.2 无人机激光雷达测量方法
无人机激光雷达系统外业实施过程包括作业前准备阶段和数据获取阶段,最后进行数据检查汇总。详细流程如图2所示。

图2 无人机激光雷达系统实施外业工作流程
2.2.1 无人机航线设计
激光雷达设置及航线设计在保证测程的基础上尽量保证更高的点密度,由于张家新庄坝控区所在地形多为山区,高差较大,在设计航线时需考虑起飞位置高度、高差起伏等因素。此次飞行设计相对航高为300 m,飞行速度80 km/h,单条航带点密度为9 pts/m2,相邻航向和旁向重叠率在60%,保障最终无人机成果16 pts/m2的点密度,确保影像重叠率满足后期DOM成果计算。
2.2.2 控制点布设
本次航摄时间是2020年1月,为保证无人机扫描点云成果与正射影像(DOM)成果统一在CGCS-2000坐标系下,且具备较高精度,利用RTK对无人机静态基站坐标和影像控制点进行测量。流动站服务为千寻知寸,经长时间收敛观测,保证RTK精度控制在2 cm以内。基站架设前,为保证数据绝对坐标的准确,提前获取准确的中心点坐标及基站天线高,从而保障整体数据的水平和高程精度,基站采样间隔设置在1 s以内。为避免控制点被遮挡和信号被干扰,控制点布置在空旷平坦、无高大树木的测区[12]。
3 应用实例
3.1 研究区概况
张家新庄骨干坝坝控区位于渭源县唐家河流域,唐家河是渭河的一级支流,呈现以黄土长梁为主,沟谷、台地、塌坡兼有的地貌景观。流域西北高、东南低,海拔高程在2 030~2 548 m之间,地形破碎,沟深坡陡。坝控区面积4.61 km2。唐家河属中温带半湿润向半干旱过渡区域,降水集中在7~9月,多年平均降水量525.7 mm。土壤主要有黄绵土、黑垆土及红土。植被属半干旱草原草场类,乔灌木有山杨、旱柳、沙棘、柠条等;草种有针茅,芨芨草等。
3.2 成果生成
3.2.1 DOM和DEM生成
利用RIEGL无人机雷达配套的RIPROCESS软件对点云数据进行处理(图3),打开数据预先存储的工程文件,导入预先解算好的轨迹数据成果,根据无人机飞行轨迹进行数据打断,成果保存为一条直线航带一条数据的形式。将打断数据进行第一次数据解算,解算为以航带为单位的可视化点云成果;根据解算数据结果进行航带间数据平差,对x、y、z、roll、pitch、yaw 6个数值进行细微调整;对平差后数据进行第二次数据解算,反复进行平差、解算的步骤,使航带平差中误差在5 cm以内;对平差后点云成果进行点云分类,根据分类结果,提取地面点云数据(图4),抽稀为不同精度点间距地面点,生成1 m分辨率DEM数据(图5)。应用Inpho UASMaster正射影像处理软件,在EO文件的基础上计算空中三角测量成果和编辑DTM,并根据外业像控点进行正射影像纠正和镶嵌匀色,生成经过正射校正,地理标定和光色均衡的5 cm分辨率数字正射影像(DOM)(图6)。
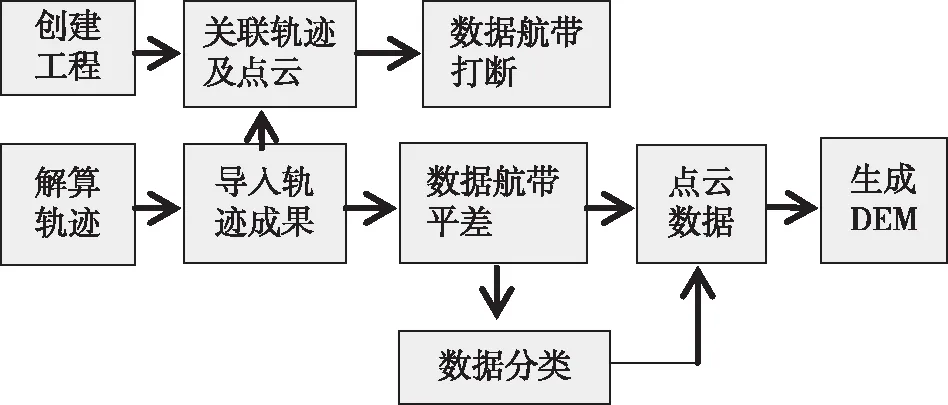
图3 无人机扫描数据处理流程
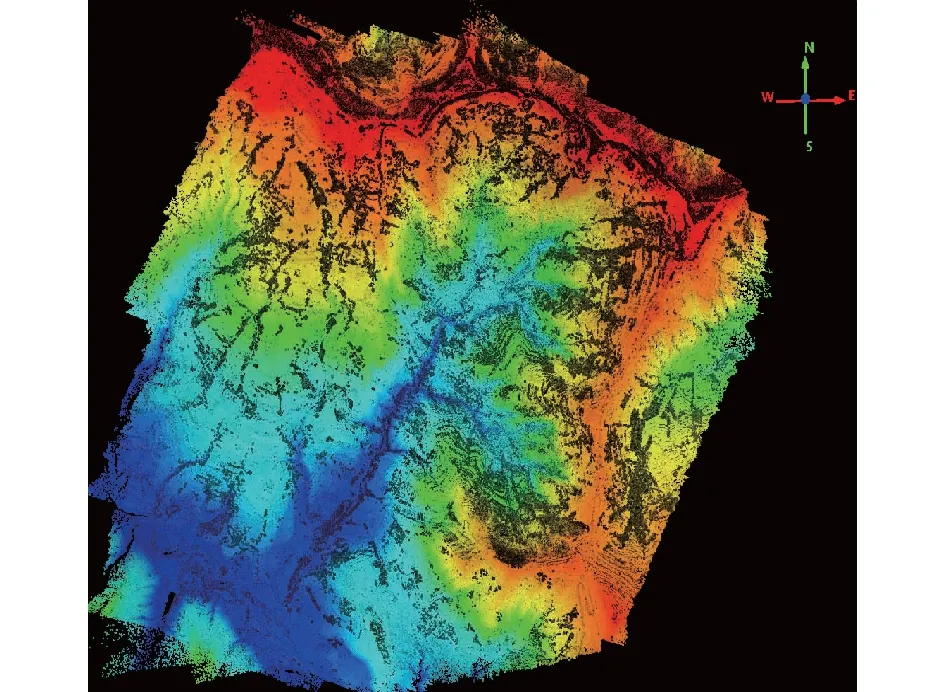
图4 无人机扫描点云数据图
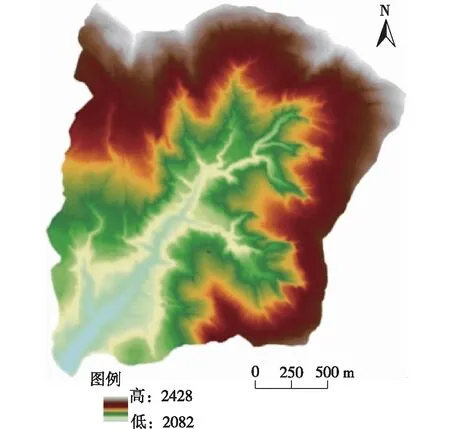
图5 坝控区DEM
3.2.2 坝控区土壤侵蚀分区
利用GIS10.2.2,以DOM为底图,通过目视解译将坝控区划分为梯田区、坡面侵蚀区和沟道侵蚀区三种类型侵蚀分区(图7),结果显示,梯田区面积最多为2.48 km2,比例达到53.80%,高于坡面侵蚀区45.34%,高于沟道侵蚀区16.06%。坡面侵蚀区和沟道侵蚀区分布着黄土洞穴侵蚀、沟蚀、滑坡等多种侵蚀方式,是发生土壤侵蚀现象最多区域。坝控区陡坡、沟坡边缘等是黄绵土分布区,成为黄土洞穴侵蚀主要形成区,从DOM图可以清晰看到坡面侵蚀区分布着大大小小以漏斗状和串珠状陷穴为主的黄土洞穴(图8a、图8b)。沟道侵蚀区以沟蚀、滑坡为主,坝控区各级支沟多处在发育阶段,发生暴雨产生沟蚀,使沟床下切、沟头延伸,引发沟岸崩塌、滑坡,致使红土裸露(图8c)。

图7 坝控区不同侵蚀分区图
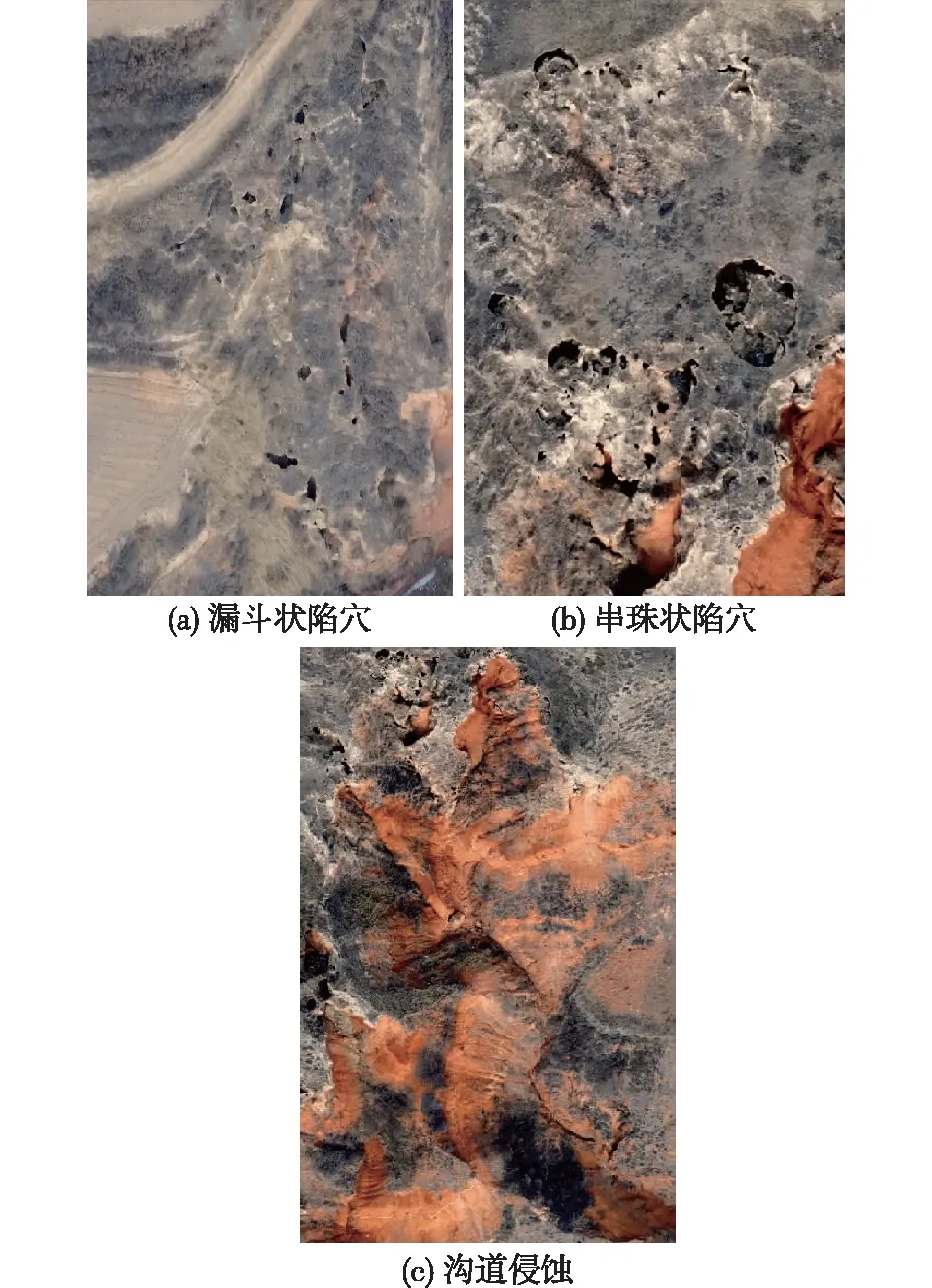
图8 土壤侵蚀类型图
3.2.3 地形因子提取
坡度是影响区域水土流失的主要地形因子,通过影响坡面渗透量与径流量大小和水流速度,从而影响地表侵蚀方式,且对坡面水文过程的影响较为复杂,产沙量也随坡度的增大而增多[13]。按>0°~5°、>5°~8°、>8°~15°、>15°~25°、>25°~35°、>35°~45°、>45°~65°、>65°将坡度值分为8级,得到坝控区坡度图(图9)。不同坡向日照时间、昼夜温差及土壤种子库密度[14]不同,导致土壤风化程度和植被类型及覆盖度各不相同,因而土壤侵蚀程度也不一样。将坡向分为平面(-1°)、北(0~22.5°、337.5°~360°)、东北(>22.5°~67.5°)、东(>67.5°~112.5°)、东南(>112.5°~157.5°)、南(>157.5°~202.5°)、西南(>202.5°~247.5°)、西(>247.5°~292.5°)、西北(>292.5°~337.5°)9个方向,得到坝控区坡向图(图10)。基于DEM数据提取坝控区高程,坝控区海拔分布在2 082~2 428 m,得到坝控区高程图(图11)。

图9 坝控区坡度分级图

图10 坝控区坡向分级图

图11 坝控区高程分级图
4 结 语
利用无人机激光雷达系统对黄土丘陵沟壑区淤地坝坝控区扫描可快速得到点云数据和影像数据,经RIPROCESS和Inpho UASMaster软件处理,生成高精度DOM,可提取坝控流域坡度、坡向等地形因子,结合DEM判别流域内土壤侵蚀类型及侵蚀分区的面积分布,可为坝控流域内土壤侵蚀量化研究和水土流失监测提供更多维的研究方法。