联合收割机自动监测系统研究
2022-04-12赵宇
赵 宇
(黑河市爱辉区农业综合行政执法大队,黑龙江 黑河 164300)
0 引言
我国是农业大国,随着农业机械化技术的不断推进,谷物联合收割机可以一次性完成谷物收获、脱粒、清选等作业环节,提高农业生产效率。在我国粮食生产中,小麦联合收获面积超过87%,水稻联合收获面积超过65%,玉米联合收获面积仅为15%左右。与发达国家相比还有一定的差距[1]。
我国联合收割机智能化及自动化水平较低,由于联合收割机结构复杂,农业生产环境较为恶劣[2],因此,联合收割机田间作业时影响因素较为复杂。如,谷物湿度、品种、种植模式、谷物喂入量、机器行进速度、脱粒滚筒转速等,驾驶员不能及时发现机器故障,严重时还导致整机故障停机,影响工作效率,降低联合收割机的工作性能。随着农业机械化自动化、智能化的发展,对联合收割机工作进行实时监测有利于驾驶员对联合收割机工作状态及工作参数实时调节,降低故障发生率,提高农业生产效率[3-4]。
本研究对目前国内外联合收割机自动监测系统的发展现状进行系统论述,对影响联合收割机自动监测系统的影响因素进行分析,提出目前联合收割机自动监测系统存在的主要问题,并给予相应的措施,指出未来联合收割机自动监测系统主要发展方向与研究重点。研究结果旨在为提升联合收割机自动监测系统工作性能及技术水平提供理论依据,对于推动农业机械化、自动化及智能化水平具有重要意义。
1 研究现状
1.1 国外研究现状
国外联合收割机大致分为欧美大型联合收割机及日本小型联合收割机两种。在欧美地区,作物种植多为大型农场,以种植小麦为主,兼收玉米、豆类、水稻等,以大型联合收割机为主,生产效率高。以美国约翰迪尔、凯斯,德国克拉斯,英国福克森为主要生产企业,其主要代表联合收割机机型如表1所示。目前,在联合收割机上采用电子传感器及智能调控系统,辅以高精度GPS定位技术,实现对联合收割机的在线监测及实时调控,基本已经实现智能化与故障诊断及分类技术。日本农业种植较为分散,多为小型种植模式,以水稻种植为主,兼收小麦等农作物[5]。

表1 国外典型联合收割机概况
1.2 国内研究现状
我国关于联合收割机的研究起步较晚,在19世纪初期,我国初步研制出E514系列联合收割机。目前,我国关于联合收割机的研究及技术相对较为成熟,但是联合收割机自动监测装置仍处于初级阶段。江苏大学首次研制出联合收割机转速自动监测系统,当滚筒转速误差偏离设定值时便会发出报警。后期黑龙江八一农垦大学也相继研制出谷物收获在线监测系统,当谷物喂入量超过设定值时发出报警,避免由于喂入量不均匀或喂入量过大造成机器故障。中国农业大学针对国产联合收割机配套研发出智能测产系统,实时更新粮食产量信息及粮食收获信息。此外,山东农业大学、华中农业大学、上海交通大学结合相关农业机械企业对联合收割机在线监测系统及故障诊断系统进行研究[6],但是相关技术仍处于初级阶段,只能实现单个部件的工作监测及报警功能,不能实现各个零部件技术参数的实时调节与优化。
2 性能要求
联合收割机监测系统的主要性能要求包括适用性、可靠性、智能化及人性化。
2.1 适用性
由于我国地域较广,不同地区地形地貌及作物种植方式差异性较大,因此要求不同联合收割机在不同地区及不同种植模式下具有一定的通用性及适用性,有利于我国不同地区农业机械化及智能化进程,这就要求联合收割机在研制过程中各个零部件可以自动调节,以适应不同的作物高度、种植密度等。
2.2 可靠性
由于农业生产环境较为恶劣,联合收割机需要一次性完成作物的收割、脱粒、清选等多项作业环节,因此要求联合收割机各个作业环节都具有一定的可靠性,避免由于一项作业环节故障而造成整个作业环节停止,耽误农业生产进程,降低农业生产效率。
2.3 智能化
赵春江院士明确指出,目前,我国农机装备发展重点仍然是提高农业机械及配套装备的智能化程度,未来发展中,复合式、高性能及智能化现代农业装备仍然是农业机械发展重点。因此,推进联合收割机信息化及智能化对于提高农业生产水平具有重要意义。
2.4 人性化
农业驾驶是一项枯燥、重复的农业工作,驾驶员要在密闭的驾驶室内进行长时间的农业驾驶工作,对于驾驶员身体素质及体力素质都具有一定的挑战性及难度,因此,应该优化驾驶室工作环境,配合智能监控系统及可视化界面,降低驾驶员劳动强度。
3 影响工作性能的主要因素
3.1 联合收割机的工作参数
联合收割机机械性能是保障谷物收获的基础条件,其工作性能也会影响联合收割机自动监测系统的工作性能,影响因素主要包括脱粒滚筒、谷物喂入量、机器行进速度等。
3.1.1 脱粒滚筒参数
脱粒滚筒转速直接影响作物脱粒效率,当滚筒转速过大时,滚筒凹版振动幅度与频率增加,从而促进谷粒分离,但是转速过大时,会造成谷物籽粒脱落,影响收获效率。
3.1.2 谷物喂入量
谷物喂入量主要受到机器行进速度、割台高度及割台宽度的影响,当喂入量过小时,会造成收割机资源浪费,喂入量过大,会增加喂入装置的负荷,造成滚筒堵塞,发生机器故障。
3.1.3 机器行进速度
机器行进速度主要受到田间作业环境、谷物湿度及地面环境的影响,机器行进速度过快,会导致谷物漏割,行进速度过慢,会造成谷物收获量增加,导致脱粒滚筒堵塞。
3.2 监测系统精度
联合收割机自动监测系统精度主要受到传感器技术、高精度定位技术(GPS)、遥感技术(RS)及地理信息技术(GIS)的影响,提高联合收割机自动监测技术水平及智能化水平,应该实现联合收割机关键作业环节及相关参数的在线检测及实时工况的监视功能,对于驾驶员及时优化技术参数提供依据。
4 联合收割机自动监测系统发展趋势
由于联合收割机工作结构较为复杂,生产环境较为恶劣,在提高联合收割机自动监测系统精度的同时,应该提升联合收割机故障诊断水平。目前,市面上常见的联合收割机故障诊断系统虽然可以实现远程控制,但是在实际生产中不方便携带。随着移动互联网技术水平的不断提升,移动故障检测及信息传输技术在航空航天系统、汽车及其他工业设备中广泛应用。未来应基于移动控制系统进行远程故障诊断,利用云端采集故障信息进行故障诊断与信息传输,主要结构组成如图1所示,关键技术模块如图2所示,可以实现对联合收割机工作部件、液压系统及动力装置工作状态的实时监测。基于远程监测服务端建立数据实时传输系统,当出现故障时及时将信息传输至移动端并进行报警,满足用户根据实时故障信息及工况进行远程故障检测与处理。
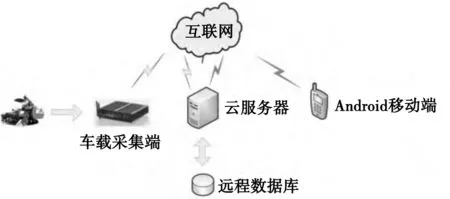
图1 基于Android移动控制系统示意图

图2 基于Android移动控制系统主要工作模块示意图
5 结论
联合收割机是目前农业生产中的重要农业机械之一,可以一次性完成谷物收割、脱粒、清选等作业环节,其自动监测系统是影响田间作业效率及工作性能的重要组成部分。本研究首先介绍了国内外谷物联合收割机自动监测系统的发展现状,与发达国家相比,我国联合收割机自动监测系统存在智能化程度低等问题,未来针对联合收割机自动监测将充分运用先进的传感器技术、控制技术、故障诊断技术、远程控制技术等实现对联合收割机自动监测系统的控制,进一步提高联合收割机的智能化控制精度及通用性,满足不同地区、不同作物的收获需求,研究结果以期为提高联合收割机自动监测系统的工作性能提供技术参考,对于推动我国农业机械智能化程度具有重要意义。
