智能植保无人机的关键技术及作业优势分析
2022-04-12贾文革于金玲
贾文革,于金玲
(梨树县万发镇综合服务中心农机服务站,吉林 梨树 136514)
0 引言
植保作业是农业防治病虫害的有效手段,据统计,从农业生产的全过程来看,因病虫害所造成的损失可达20%~30%。由于我国农田面积大、地块分散、种植作物的种类繁多,生产过程对于植保机械的需求各不相同。加之我国农业生产存在着明显的粗放性弊端,导致生产过程中使用的化学农药利用率低,防治效果不理想,且容易造成耕地及周边环境的污染,从2018年的统计数据来看,我国农业耕地受到农药污染的面积已达1 300万~1 600万 hm2,严重影响着农田周边的生态环境,也影响着农作物产出后的食品安全。截至2020年底,我国机动植保机械总量628.27万台,较上年增长1.17%,植保机械应用量的增长在提高植保效率的同时,也对农田造成了更严重的污染威胁,如何科学利用农药成为机械植保必须面对的问题。近年来,智能植保无人机逐渐参与到农业植保作业之中,并体现出了独特的技术优势,合理利用和发展植保无人机技术将成为合理防治病虫害的有效手段。
1 智能植保无人机的结构
1.1 主体结构及组成
现阶段农业生产中广泛使用的植保无人机是在多旋翼无人机的技术上发展而来的,其将多旋翼无人机的主体结构与植保喷杆喷雾技术进行有机结合,并利用电气控制技术实现对无人机飞行状态和农药喷洒状态的精确控制,从而实现高效的农业植保智能喷雾作业。图1为农用智能植保无人机的主体结构示意图,包括了多旋翼飞机主体、喷雾机构总成、药液箱、输药管路、药液泵、电气控制系统、传感器总成、卫星定位模块等组成[1]。
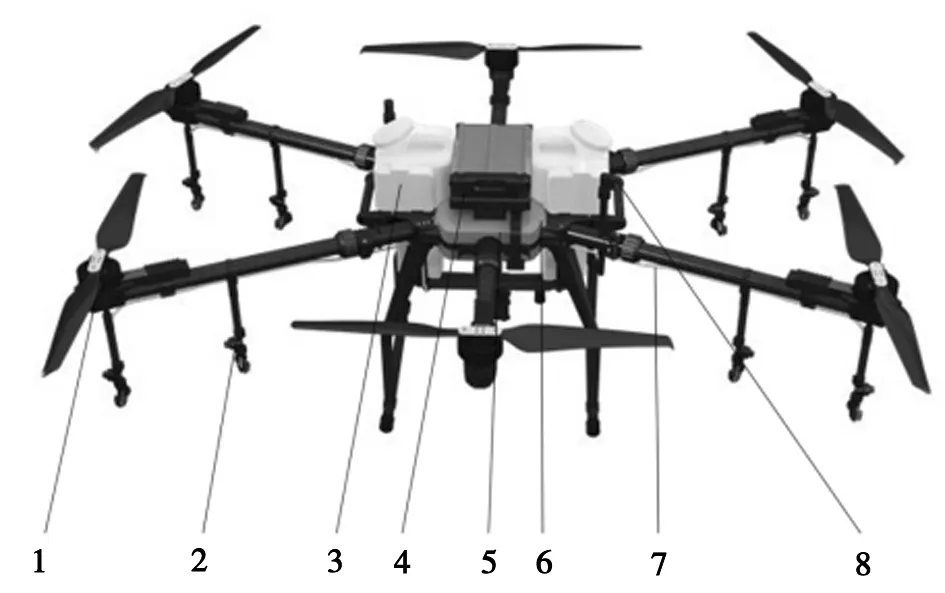
1.飞机主体;2.喷雾机构总成;3.药液箱;4.传感器总成;5.药液泵;6.电气控制系统;7.输药管路;8.卫星定位模块
1.2 主要系统功能
1.2.1 飞机控制系统
智能植保无人机控制系统的核心是PLC主芯片,作为数据收集和处理的核心,主芯片主要承担以下工作任务:一是接收GPS定位和各传感器的信息,并对信息进行分析、存储、传输;二是按照PLC预设程序执行对飞行的控制和药物喷洒的控制;三是接收并执行遥控器输入的指令。除主芯片外,飞机控制系统还通过主板及延伸的供电及通信线路与无刷电机、药液泵、管路电控开关等连接(图2),实现各个功能部件与主芯片的有效连接。此外,飞行控制系统的硬件还配套有PWM 、CAN、IIC、UART 等接口,能够便捷的实现人机交互。

图2 无人机主板结构图
1.2.2 飞行动力系统
智能植保无人机的动力系统是飞行喷雾作业的基础保证,现阶段的飞行动力能源主要采用电池电能,通过电能驱动无刷电机运转并带动桨叶旋转,利用多个桨叶同时切割空气形成稳定的升力,推动植保无人机飞行。飞行过程中可通过控制电子调速器调整每个无刷电机转速,从而实现对飞机飞行状态的控制。
1.2.3 农药喷洒系统
农药喷洒系统是智能植保无人机另一个核心技术系统,现阶段的植保无人机农药喷洒主要以喷杆喷雾的形式实现,喷洒系统包括了农药箱、药液泵、输药管路、过滤装置、喷杆、喷头等,植保无人机主要采用浓缩药液作业,以降低飞机负载。喷洒作业过程由药液泵驱动农药在输药管路内流动,当管路内形成足够压力后,由喷头进行高雾化喷施[2]。
2 植保无人机的关键技术
2.1 卫星定位技术
卫星定位技术是植保无人机自动喷雾作业的基础保证,能够保证无人机精确获取田间位置信息。植保无人机的卫星定位功能主要通过植保无人机上的卫星定位模块实现,随着农村地区技术设施建设的完善,卫星定位芯片结合卫星地面基站能够有效对无人机的定位精度进行修正,保证无人机的作业精度达到厘米级,使无人机更够更好地利用卫星进行导航,并在电池电量不足或农药余量不足时实现自动返航和精准断点续喷,有效减少重喷、漏喷问题的发生。
2.2 智能控制技术
随着植保无人机功能的不断丰富,对其控制要求也不断提升,现阶段来看,针对智能植保无人机而言,不仅要求控制系统实现对飞机的飞行和喷雾的常规控制,还必须实现飞行速度与喷雾量的智能匹配,同时通过环境感知技术获取环境信息,实现有针对性的作业,如根据风力大小调整喷雾方式,大风天气自动返航、异常气流悬停、自动避障等。同时实现对各个功能装置的监控,监测飞行速度、电池电量、药液余量等,并实现电池低压保护、无人机异常警示等功能。
2.3 人工遥控技术
人工遥控技术是通过遥控器或智能手机对无人机实现控制,利用人工控制完成农业生产过程中无人机难以自动完成的工作任务。智能植保无人机在某些特定情况下难以独立完成作业任务,如在作业开始前利用无人机获取并定位农田的边界信息,驾驶员操作植保无人机飞行到指定位置后记录定位信息,并通过多点记录生成作业范围,供植保无人机自动作业使用,如图3所示为植保无人机定位边界信息后系统自动规划的作业路径。或在卫星定位信号不良地区,可通过人工控制飞机飞行,配合农药自动喷洒实现半自动化作业。无人机使用者也可自主驾驶无人机进行植保作业,用以实现果园、山地等复杂农田的植保喷雾作业。

图3 定位边界信息及喷施路径规划
3 植保无人机的作业优势
3.1 喷药质量明显提升
由于植保无人机喷洒药物的高度距离作物顶部仅400~600 mm,采用此种低空喷雾有利于显著提高农药的利用率,利用现代控制技术,植保无人机飞行速度与喷雾量形成合理匹配,避免了过量喷药造成农作物农药残留问题的发生。先进的植保无人机采用了高雾化喷头,配合桨叶旋转产生的气流,能够保证农药雾滴均匀的覆盖在农作物表面,显著提高植保作业效果。此外,对于免耕播种或密植作物,植保无人机桨叶产生的气流能起到良好的渗透作用,能实现对作物中下部甚至根部的药物喷施[3]。
3.2 植保效率显著提升
智能植保无人机作业相对于传统植保机械而言,不受地形条件的制约,植保作业的最佳效率可达6~10 hm2·h-1,可达到普通轮式喷杆喷雾机作业效率的2~3倍,更是传统半自动化喷雾作业效率的40倍以上。且植保无人机工作过程可靠性更好,作业稳定性强,维修、维护耽误的工时明显减少[4-5]。
3.3 作业安全性更高
植保无人机可实现远距离控制和无人智能作业,由于远程操作和智能作业的便捷性,不仅降低了人员操作的难度,同时避免了操作人员直接接触农药而出现的健康威胁,相对于传统的人工植保和机械驾驶植保,无人机植保操作人员基本不受农药药害,作业安全性显著提高[6]。
3.4 有利于保护农作物
植保无人机作业过程不直接与农作物接触,相对于传统的轮式机械作业,不会对农作物产生挤压、剐蹭等影响,且作业过程不会破坏土壤的物理结构,有利于保持农作物生长的物理条件和植株健康状态,且无人机植保作业有利于减少农药残留,避免土壤污染影响农作物健康生长。
4 无人机技术应用及发展难点
4.1 政策支持不足
现阶段来看,我国不同地区对于植保无人机的技术支持和相关政策倾斜存在较大的差异性,部分地区已将植保无人机纳入无人机补贴范围,但仍有很多地区未将植保无人机纳入农机购置补贴范围,即使植保无人机纳入补贴,但仍存在限量补贴、补贴金额较低等问题,导致农民购买植保无人机的经济负担加重,购机热情相应降低[7]。
4.2 技术不够成熟
现阶段应用的植保无人机以电驱动多旋翼机型为主,由于其发展的时间较短,尽管在飞控技术方面已经较为成熟,但是无人机在农业生产过程的应用仍没有充分与我国生产实际相结合,存在的主要问题包括:1)农药的适应性差。我国的农药生产能力很强,市场上销售的农药品种很多,但植保无人机的工作必须使用专用农药,导致传统生产过程中使用的很多技术成熟的农药不能直接应用于植保无人机,农民在植保作业过程中的农药选择无法利用自身经验,常造成植保过程农药选择的不合理。2)飞机续航能力不足。航空植保需携带大量农药,在此过程中对于电量的消耗速度很快,现阶段的电池技术难以支持植保无人机长时间高效率的工作,导致在更换电池、电池充电等过程中植保无人机的整体工作效率降低。
4.3 缺乏统一规范与监管
现阶段我国的植保无人机市场相对混乱,由于植保无人机的基础研发和投入时间较短,机型的种类较多,品质存在较大差异,且农机监管部门对于植保无人机这一新型农机还没有建立系统的监管规范和相关制度,导致无人机在农业生产和销售的过程中存在一定的质量缺陷。同时受到国家飞行作业的政策制约,部分先进的无人机设备难以在我国农业生产的植保作业中应用,这影响了植保无人机行业的技术优化与合理发展[8]。
5 结语
综上所述,智能植保无人机具有农药利用率高、防治效果好、工作效率高、安全性好等众多优势,且对于农业生产的地形、小块田地、作物品种具有良好的适应性,在确保病虫害防治的同时,还能降低传统机械植保造成的农药污染问题。与此同时,植保无人机技术在智能控制、电池电力、喷雾能力方面仍有较大的提升空间,我国农民对植保无人机的驾驶和应用能力也有很大的提升空间,需要通过智能无人机技术及应用能力的不断升级,保证无人机植保作业的高质量实施。
