一种适用于直流微网的电流差动保护
2022-04-11李佼洁刘毅力沈志雨方存龙
李佼洁,刘毅力,沈志雨,方存龙
(1.西安工程大学电子信息学院,陕西 西安 710048;2.国网安徽省电力有限公司滁州供电公司,安徽 滁州 239000)
近年来,随着中国可再生能源产业的迅猛发展,以及电力系统中分布式电源(distributed generation, DG)渗透率的不断提升,正推动着微电网的建设规模逐渐壮大。直流微网作为一种新型组网方式,可更加可靠地接纳各种分布式电源、负载及储能装置,对实现能源可持续发展具有重要意义,将成为未来智能电网的重要组成部分。然而,其拓扑结构的特殊性使得短路故障对系统安全构成极大的威胁,目前发展已非常成熟的交流配网保护技术难以直接运用。因此直流微网的故障保护技术仍处于发展阶段,制约着直流微网的大规模推广和应用[1-2]。
目前现有的保护方案主要可分为单端量保护和基于通信的保护[3],单端量保护主要是利用电流、电压等电气量实现故障识别,需要通过复杂的整定和适当的延时实现上下级配合,如过电流保护、电流变化率保护[4]等,对直流微网而言误动的可能性较大。文献[5]提出了基于暂态电流变化率绝对值的反时限保护方案,可通过自适应调节保护动作配合时间,达到快速切除故障的目的,但抗过渡电阻能力未知。基于通信的保护主要是利用智能装置切除和隔离故障,无需复杂的整定且具有绝对的选择性[6]。文献[7]利用智能电子设备,配合电流差动保护对环形微网节点电流和断路器进行监控,可有效地实现故障隔离,但在高阻故障时灵敏性可能存在欠缺;文献[8]提出了基于母线功率变化率的新型差动保护,有效地解决了高阻短路保护拒动的问题,但由于潮流分布存在差异,此方法仅适用于环形直流微网。本文以低压放射形直流微网为研究对象,采用双斜率电流差动保护作为主保护,欠电压保护和电流变化率保护作为后备保护,并基于PSCAD仿真软件验证此方案对于不同接地阻抗的有效性。
1 直流微网的故障分类及特征分析
放射形直流微网主要由光伏(DG)、储能装置(蓄电池)、换流器(AC-DC、DC-DC)和直流负载组成,如图1所示。图1中,公共连接点(point of common coupling,PCC)为大电网与微网并网的耦合点,L1、L2分别为并网换流器和负载与直流母线相连的电缆线路,BRK1~8为各支路的直流断路器。其中并网换流器为电压源型换流器(voltage source converter, VSC),采用对称单极接线方式便于故障检测。系统故障类型可大致分为极间短路故障和单极接地故障[9]。在实际运行中,单极接地故障发生频率远大于极间故障,但后者对系统的危害更加严重。

图1 放射形直流微电网结构Figure 1 Radial structure of DC micro-grid
由于采用的保护方案主要针对VSC整流侧故障,负载和DG支路不存在分段,仅需配置简单的过流保护即可,故不再详细展开阐述。
1.1 极间短路故障分析
直流微网发生极间短路故障时,其等效电路如图2所示。图2中,R0、L分别为VSC到故障点的等效电阻和电感,Rf为短路阻抗,C为直流侧大电容,Udc为直流母线电压,D1~D6为续流二极管。其暂态响应可分为3个阶段,如图3所示。

图2 极间短路故障时VSC等效电路Figure 2 Equivalent circuit of VSC in inter-pole short circuit fault
1)电容放电阶段。在故障发生时刻,VSC紧急闭锁,直流侧大电容快速向故障点放电[10],Udc迅速下降,故障电流迅速上升。此时有:
if=iVSC+ic
(1)
式中if为故障电流;iVSC为交流侧电流;ic为电容放电电流。
因ic>>iVSC,故交流侧电流可忽略不计,即if≈ic,其等效电路如图3 (a)所示。此时直流电容、线路阻感及短路阻抗构成RLC二阶振荡电路,即

图3 极间短路故障暂态响应的3个阶段Figure 3 3 stages of transient response of inter-pole short circuit fault
(2)

若U0和I0分别为发生故障时VSC直流侧的初始电压和电流,则方程的解为
(3)
电容放电电流为
ic(t)=
(4)
iL的时域表达式为
(5)

(6)
由式(6)可知,VSC直流侧短路时,初始电压U0与电流I0越大,放电电流的峰值就越高。
2)二极管续流阶段。随着电容放电过程的进行,电容端电压逐渐降至交流侧电压,此时二极管承受正向电压而导通。与此同时电感放电,此刻流经二极管的电流为电感放电电流与交流侧电源电流之和。该阶段可看作RL一阶回路,如图3(b)所示。电感电流衰减规律为
iL(t)=I′0e-(R/L)t
(7)
式中I′0为初始电感放电电流。由于电感放电电流的初值较大,会使二极管中流过冲击性电流,若其过流能力较低则会有损坏的可能。
3)交流侧馈电阶段。当电容电压逐渐低于交流侧电压,二极管开始流过反向电流,系统进入交流侧馈电阶段,等效回路如图3(c)所示,相当于工作在交流侧短路状态。分析可知,保护须在电容放电结束前动作,以防故障范围的进一步扩大,同时二极管须具备一定的过流能力。
1.2 单极接地短路故障分析
直流微网发生单极接地故障等效电路如图4所示,回路①和②分别表示故障的2个阶段。

图4 单极接地短路故障时VSC的等效电路Figure 4 Equivalent circuit of VSC in a single-pole ground short circuit fault
由于大电容中性点接地,所以在电容放电阶段,故障阻抗接地点与电容中性点等电位,形成RLC二阶回路。而正负极的电容依旧各承担一半VSC整流后的电压,回路方程为
(8)

对于2种故障类型的电容放电阶段,当线路发生金属性短路,或短路阻抗较小时,为二阶欠阻尼振荡过程;当短路阻抗较大时,为二阶过阻尼振荡过程。由于极间短路故障以金属性故障为主,一般为欠阻尼过程;单极接地故障可能为欠阻尼或过阻尼过程[11]。
2 保护方案
2.1 改进的电流差动主保护
由文第1节分析可知,2种故障对微网系统和器件都具有一定危害性,其故障特性要求系统的保护装置动作更加准确迅速[12]。由于直流微网线路较短,故障电流受短路阻抗变化的影响较大且特征相似,可能导致传统的过电流保护、电流速断保护、电流变化率保护等误动。而电流差动保护仅需考虑线路两端电流差值,整定容易,动作迅速且具有绝对的选择性[13],因此可应用于直流微网线路的主保护中。
传统电流差动保护的动作判据为
(9)
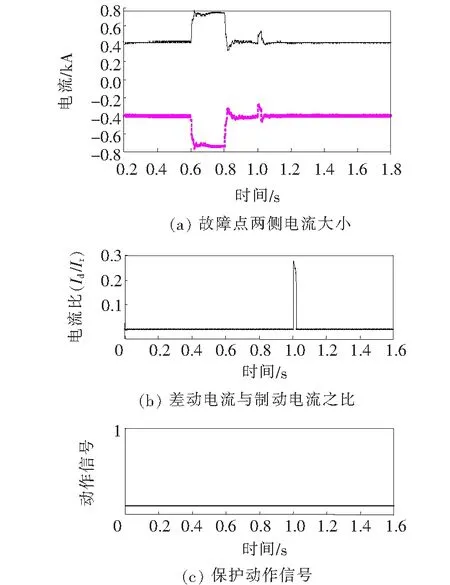
式中Im、In分别为被保护线路两端的电流,规定电流由母线指向被保护线路为正方向;Id为差动电流;Ire为制动电流;K为比率制动系数,0 相比于极间短路故障,直流微网单极接地故障电流较小,对电力设备的危害度相对较轻。为保证差动保护不拒动,保护须尽可能识别由危害度较轻的故障引起的电流幅值变化,即高阻接地故障。而传统的差动保护须兼顾区外故障判定的可靠性,从而K值不能过低[14],这很可能导致保护无法检测出由区内高阻故障产生的过小的差动电流,灵敏性偏低,不能及时切除故障。 为了实现对高阻故障的检测,本文采用双斜率电流差动保护作为主保护,即引入一级判定依据,保护逻辑如图5所示。其中,K1、K2分别为高、低制动系数,Δt为判据所需延时,其余物理量的含义同式(9)。 图5 双斜率电流差动保护逻辑Figure 5 Logic of double slope current differential protection 1)判据①用于开放保护,当差动电流达到启动值时开放,反之闭锁。对于正常运行和区外故障状态下的被保护线路,无论是单端供电还是双端供电,线路两端电流均等值反向,差动电流为0,保护不动作。 2)判据②、③为低阻故障判据。发生区内低阻故障时,双端供电线路的故障点两端电流同向,判据②、③均满足,保护瞬时动作;对于单端供电线路,尽管故障点两端电流反向,但Id和Ire会有明显的差值,满足判据③,保护同样会立即动作。 3)判据④为高阻故障判据。此情况下线路两端电流反向,但存在一定的电流差,即Im≠In,当装置检测出故障电流满足判据④,且持续时长≥Δt,则判定为区内高阻故障,保护动作,否则判定为系统扰动产生的不平衡电流。 4)其他情况则视为区外故障,保护不动作。需要说明的是,对于判据④,为了避免K2设置过低造成区外故障保护误动,参考现有的微机差动保护装置,实际应用中K2的取值通常按照线路2端电流互感器变比的最大误差为10%来整定,取值范围一般为0.2~0.5;延时Δt的设置是为了防止系统中的瞬时干扰造成保护误判,当且仅当满足延时条件判定为区内高阻故障时,保护才会动作。 为了防止主保护拒动时危害系统安全,须配备后备保护作为第2道防线。由于在电流差动保护中增加了高阻判据,因此需要根据不同的故障类型及故障短路阻抗大小配备相应的后备保护。 1)当直流微网发生极间短路和单极接地故障时,并联二极管的过电流耐受能力有限,因此要求外部保护尽可能快速动作,其中极间短路故障的动作时限要求在10 ms之内[15]。根据故障瞬间直流母线电压会迅速跌落这一特征,选用其电压幅值突变量作为欠电压保护的启动判据,理论上可满足VSC直流侧保护动作时限要求[16]。其保护判据为 (10) 式中Ur为母线电压实际值;Uset为欠电压保护整定阈值;Udc为直流母线额定电压。当直流母线电压下降至额定电压的80%时,多数电气设备仍能正常工作[17],因而设置整定值为正常运行期间母线电压的0.8倍。当检测到母线电压降低至整定阈值且经延时后仍未恢复至正常电压时,保护动作将故障线路切除。此处设置的延时时间应小于并联二极管的过电流耐受时间。 2)当直流微网发生单极高阻接地故障时,其直流母线电压仅表现为微小的波动,欠电压保护不会动作。相较于低阻故障,高阻故障时电流不会出现很高的峰值,但依旧会以很高的速率上升,因此可以根据故障电流变化率特性配置对应的后备保护[18]。其保护判据为 (11) 式中 |dif/dt|为故障电流变化率的绝对值;|dif/dt|set为电流变化率的整定值;Krel为可靠系数,一般取0.9-0.95;|dif/dt|max为高阻故障时线路末端出现的最大电流变化率的值。作为主保护高阻判据对应的后备保护,其设置的延时应大于电流差动保护高阻判据的动作时间。 综上,保护判据流程如图6所示。 图6 保护判据流程Figure 6 Flow chart of protection criteria 为了验证上文所述保护方案的有效性,在PSCAD/EMTDC中搭建了放射形直流微网模型,如图1所示,其仿真参数如表1所示。 表1 直流微网仿真参数Table 1 Simulation parameters of DC micro-grid 主保护和后备保护通过逻辑“或”相连,构成一整套保护共同作用于断路器BRK1、BRK2。各保护参数设置如下:对于主保护,差动保护启动定值Iq=5 A,高制动系数K1=0.4,低制动系数K2=0.2,故障判定延时Δt=50 ms;对于后备保护,欠电压保护整定阈值Uset=320 V,延时设置为1 ms;电流变化率保护的可靠系数Krel取0.9,延时时间设置为60 ms。 为了验证所采用保护方案的可靠性,t=0.6 s时,在L2线路设置区外故障,Rf=0.2 Ω,持续0.2 s;t=1 s时,在L1线路设置瞬时性接地故障,Rf=1 Ω,持续0.02 s,仿真结果如图7所示。 图7 区外故障和瞬时故障仿真结果Figure 7 Out-of-area and instantaneous fault simulation results 由图7可知,区外故障时故障点两侧电流出现明显变化,但由于故障点两侧电流等值反向,Id=0,故保护无跳闸信号;第2次故障虽然达到差动保护高阻判据的制动系数,但故障持续时间过短,未达到高阻判据的延时,因此可判定为系统瞬时扰动产生的不平衡电流所致,保护不动作。由此可见,对于区外故障和区内瞬时故障,保护均不会误动,满足了保护的可靠性要求。 为验证差动保护低阻判据和欠电压保护可以实现有效地配合,以L1线路中点处发生正极接地故障和极间短路故障为例进行仿真,其中正极接地和极间短路的故障阻抗均为Rf=0.1 Ω,故障发生时间均为0.6~0.8 s,仿真结果如图8、9所示。 图8 极间短路故障仿真Figure 8 Simulation of inter-pole short circuit fault 由图8可知,发生极间短路故障时,差动电流与制动电流之比接近1,满足电流差动保护的低阻判据,保护于t=0.600 5 s时变为高电平;对于后备保护,t=0.625 s时,Udc降至最低值0.303 kV,欠电压保护在t=0.609 s时出现动作信号。由此可见,主保护在极间故障发生后的0.5 ms迅速动作,可有效地防止故障范围进一步扩大;若差动保护拒动,欠电压后备保护也可在故障发生后的9 ms迅速切除故障,满足直流微网保护的动作时限要求。 由图9可知,发生正极低阻接地故障时,同样会产生很大的差动电流和很小的制动电流,Id/Ir比值接近于1,满足主保护低阻判据,保护立即动作;在t=0.624 s时,直流母线电压Udc降至最低值0.316 kV,欠电压后备保护在t=0.619 s时变为高电平。对比以上2种故障可发现,在接地阻抗大小相同的情况下,极间短路故障的影响范围更大,其对于保护时限的要求也更加严苛,而故障时母线电压发生突变这一特征,为欠电压后备保护配置提供了可行性保证。 图9 正极低阻接地故障仿真Figure 9 Simulation of positive low resistance grounding fault 为验证电流差动保护高阻判据可以有效地提高保护对于高阻故障的灵敏度,对L1不同位置发生正极高阻接地故障(故障持续时间均为0.2 s)的情况进行仿真,差动电流与制动电流的比值(Id/Ir)、传统差动保护以及改进的保护动作情况如表2所示。L1线路中点发生正极接地故障时Id/Ir与短路阻抗Rf的关系以及双斜率电流差动保护与传统电流差动保护的动作区域如图10所示。 由表2和图10可知,随着Rf的增大,Id/Ir与其呈负相关,且衰减逐渐变得缓慢。传统差动保护仅在Rf较小时能可靠动作,抗过渡电阻能力较弱;而改进后的电流差动保护在较大的Rf情况下仍能可靠识别故障并动作,其灵敏度显著高于传统电流差动保护。 图10 L1中点发生单极短路时Id /Ir与Rf的关系及保护动作范围对比Figure 10 Relationship between Id /Ir and Rf and the scope of protective action in case of single pole short circuit at L1 midpoint 表2 高阻接地故障保护动作情况对比Table 2 Comparison of protective actions under high resistance fault 此外,本文还对电流变化率保护的有效性进行了验证。以L1中点在t=0.6 s发生正极故障为例,Rf=0.6 Ω,动作值按线路末端故障的最大电流变化率整定为16.2 A/s。测得的电流变化率和保护动作情况如图11所示。由图11可知,L1中点发生故障时,电流变化率最高可达84 A/s,当主保护因为某些原因无法正常动作时,电流变化率后备保护于0.660 5 s时动作,实现了直流微网单极高阻接地短路故障的保护,以及与主保护高阻判据动作时序的配合。此外比较表2和图11可知,差动保护能识别的短路阻抗大小范围随故障点距离的增大而略有缩小,但影响远小于电流变化率保护。 图11 Rf=0.6 Ω时电流变化率与保护动作情况Figure 11 The current change rate and protection action when Rf=0.6 Ω 针对直流微网的传统电流差动保护在高阻故障时拒动的问题,采用双斜率电流差动保护实现对区内高阻故障的检测,并根据高、低阻判据分别配置了相应的后备保护,最后通过仿真设置不同类型、不同位置、不同短路阻抗的线路故障,结果表明,改进的保护方案几乎不受故障类型及故障点位置影响,可快速、准确识别故障,对于区内高阻故障有较高的灵敏度,提高了直流微网的供电可靠性,同时也为实际运用提供了参考。
2.2 欠电压与电流变化率相结合的后备保护

3 仿真验证

3.1 区外故障和区内瞬时故障验证
3.2 极间短路故障及低阻接地故障验证


3.3 线路不同位置发生高阻接地故障验证



4 结语
