基于重构电压矢量的共直流母线型开绕组永磁同步电机改进直接转矩控制
2022-04-09柯伟煌王铭泽
孙 丹 赵 琛 柯伟煌 王铭泽 年 珩
基于重构电压矢量的共直流母线型开绕组永磁同步电机改进直接转矩控制
孙 丹 赵 琛 柯伟煌 王铭泽 年 珩
(浙江大学电气工程学院 杭州 310027)
针对共直流母线型开绕组永磁同步电机(OW-PMSM)基本电压矢量丰富、存在零序回路的特性,该文提出两种基于重构电压矢量的共直流母线型开绕组永磁同步电机改进直接转矩控制策略。为充分利用OW-PMSM所产生的电压矢量,定义19个重构电压矢量并基于此改进零序电流抑制方法,扩大直接转矩控制的备选电压矢量范围。根据重构矢量数量多、幅值不同的特点,将五位转矩滞环控制器引入直接转矩控制中,实现电机转矩脉动的抑制。针对滞环控制器控制精度有限等问题,提出无滞环控制器的改进直接转矩控制策略,定义一种新的区域划分方式并建立重构电压矢量选择表,通过对参考电压矢量的定位实现重构电压矢量的精确选择。实验结果验证了所提控制策略的可行性和优越性。
开绕组永磁同步电机 共直流母线 直接转矩控制 零序电流抑制
0 引言
永磁同步电机(Permanent Magnet Synchronous Machine, PMSM)因其效率高、功率密度大等优势,在交通运输、军事、航空航天等领域得到广泛应用[1-3]。随着工业化的推进,电机驱动系统继续朝着高性能、高效率、高可靠性方向发展,开绕组(Open-Winding, OW)PMSM系统应运而生[4-5]。
OW-PMSM并不改变电机的本体结构,仅将传统PMSM的中性点打开,形成开放式绕组,绕组两端各连一个逆变器。双逆变器可产生多电平效果,产生更丰富的电压矢量[6]。在双逆变器开绕组系统常见的几种供电方式[7-9]中,共直流母线型系统具有体积小、性价比高等优点,得到国内外学者的广泛关注。然而,共直流母线的存在为零序电流提供了流通回路,而零序电流会增加电机系统的损耗,使电机发热严重,破坏系统性能,因此需对其进行抑制以提高系统效率[10-12]。
目前,共直流母线型OW-PMSM系统零序电流抑制已有丰富的研究成果。文献[13]建立零序电流的闭环控制回路,引入正弦脉宽调制(Sinusoidal Pulse Width Modulation, SPWM)策略使逆变器磁场产生合适的零序电压以抵消反电动势的3次谐波含量,实现零序电流的抑制,但控制过程繁琐。文献[14]引入PR控制器获得零序电压的参考值,并通过调制生成所需的零序电压以抑制零序电流,但PR控制器的参数难以整定。文献[15]则引入模型预测控制思想,通过预测模型结合价值函数来获得最佳的零序电流抑制效果,但需遍历所有备选电压矢量,计算量大。
直接转矩控制(Direct Torque Control, DTC)是一种高性能的电机控制理论,它结构简单、鲁棒性强、响应迅速[16]。传统DTC采用两个滞环控制器通过电压矢量选择表确定所需电压矢量,但电机转矩脉动较大[17]。通过引入多电平逆变器可产生更多的电压矢量,抑制电机的转矩脉动[18],这与开绕组系统的多电平特性相吻合,因此,DTC对于减小OW-PMSM的转矩脉动具有很大潜力。
文献[19]通过选择零序电压为零的电压矢量作为控制转矩和磁链的基本电压矢量,并插入零矢量来产生合适的零序电压以抑制零序电流,但整个控制中仅利用6个中矢量和零矢量,并未充分利用OW-PMSM系统所提供的电压矢量。文献[20]根据电机不同的转速建立了两个电压矢量选择表,在低速时选择小矢量,在高速时选择中矢量和大矢量,充分利用了OW- PMSM所产生的电压矢量,然而电机高低速的界限模糊,难以准确界定。文献[21]引入五位转矩滞环控制器,将电压矢量选择表合并为一个,并根据转矩滞环控制器的输出大小选择电压矢量,但由于滞环控制器本质上是一种不精确的控制器,它允许被控制量存在一定误差,同时,根据滞环控制器的控制机理,当转矩或磁链误差达到滞环控制器的设定带宽边界时,将直接选择反矢量作用而不存在选择相邻矢量的过渡过程,因此其转矩脉动的抑制效果仍然有限。文献[22]提出了一种不含转矩滞环控制器的DTC策略,通过一种新的区域划分方式并设置对应电压矢量选择表来选择电压矢量,转矩脉动抑制效果明显,但此方法仅适用于双独立电源型OW-PMSM系统,由于零序电流约束的存在,该方法无法直接移植到共直流母线型OW-PMSM系统的控制中。
本文提出了基于重构电压矢量的共直流母线型OW-PMSM的改进DTC策略。首先建立共直流母线型OW-PMSM的数学模型,分析其基本电压矢量及对应的零序电压。借助基本电压矢量零序电压大小不一的特性,重构出一组零序电压为零的新电压矢量,并提出基于重构电压矢量的改进零序电流抑制方法。为充分利用共直流母线型OW-PMSM系统所产生的电压矢量,提出基于重构电压矢量和改进零序电流抑制方法的五位转矩滞环控制器改进DTC策略和无滞环控制器改进DTC策略,以提高电压矢量的选择准确度,减小电机的转矩脉动。最后通过实验验证所提控制策略的有效性和优越性。
1 共直流母线型OW-PMSM系统数学模型
1.1 共直流母线型OW-PMSM系统拓扑结构
共直流母线型OW-PMSM系统拓扑结构如图1所示。常规PMSM三相定子绕组的中性点被打开,定子绕组两端分别与逆变器1和逆变器2相连,整个系统仅使用一个直流源,并通过双逆变器向电机供电。
双逆变器为OW-PMSM提供的电压可表示为

式中,为电机三相电压,=a,b,c;1和2分别为逆变器1和逆变器2为电机提供的电压;dc为系统直流侧电压;1和2分别为逆变器1和逆变器2各桥臂的开关信号,当=1表示上桥臂的开关器件导通,反之,当=0表示下桥臂的开关器件导通。
1.2 共直流母线型OW-PMSM数学模型
OW-PMSM在αβ坐标系下的定子电压可表示为
式中,α、β、α、β和α、β分别为电机αβ坐标系下的定子电压、定子电流和定子磁链α、β轴分量;s为电机定子电阻。
利用电压型磁链观测器,共直流母线型OW-PMSM的定子磁链s为


不同于常规PMSM系统,共直流母线型OW-PMSM系统的双逆变器通过一组母线连接在一起,形成了零序电流的通路。零序回路会产生零序电流和3次磁链,因此共直流母线型OW-PMSM在0轴下的电压和电流可表示为


考虑到零序电流的存在,OW-PMSM的输出转矩可表示为

式中,e为电机输出转矩;p为电机的极对数。
1.3 基本电压矢量分析
单个逆变器有八种开关状态,因此双逆变器共有64种不同的开关状态,但由于开关状态组合存在冗余,使其仅对应19个不同的基本电压矢量,基本电压矢量的分布如图2所示,其中包括大矢量(蓝色电压矢量)、中矢量(紫色电压矢量)、小矢量(粉色电压矢量)各6个及零矢量1个。其中′表示由逆变器1提供和逆变器2提供′的合成结果。

图2 基本电压矢量分布
由于共直流母线型OW-PMSM系统存在零序电流通路,因此需考虑基本电压矢量所对应的零序电压,其零序电压可表示为

根据式(8)可知,大矢量的零序电压为±dc/3,中矢量的零序电压为0,小矢量的零序电压为±2dc/3或±dc/3,而零矢量的零序电压为±dc或0。
2 传统直接转矩控制策略
由于仅有6个中矢量是零序电压为0的有效电压矢量,因此为抑制零序电流,传统的共直流母线型OW-PMSM DTC仅将6个中矢量作为候选电压矢量[23]。电压矢量的扇区划分如图2所示,利用式(3)和式(9)观测定子磁链的扇区位置信息。
考虑到OW-PMSM系统中开关状态组合的冗余性,本文选择其中一组中矢量(24′,26′,46′,42′,62′,64′)形成电压矢量选择表,见表1。
表1 传统直接转矩控制电压矢量选择表

Tab.1 Voltage vector selection table of conventional DTC
当选择6个中矢量作为候选电压矢量时,虽可保证施加电压矢量的零序电压为0,但由于存在3次谐波反电动势,系统仍存在零序电流。为抑制零序电流,传统方法是将零矢量插入控制周期[15]。
将式(5)做离散化处理,并令下一时刻的零序电流值为0,即可得到此时系统所需的零序电压参考值为

式中,上标ref表示参考值;0()为第个控制周期电机的零序电流;s为系统控制周期。

因此,在一个控制周期s内,由零矢量作用时间,而剩余s-时间施加电压矢量选择表选出电压矢量。这样便可合成系统所需的零序电压矢量,从而使电机零序电流得到有效抑制。
3 改进直接转矩控制策略
相比于常规PMSM,OW-PMSM可产生更为丰富的电压矢量,相当于细化了电压矢量平面。因此可考虑合理利用所产生的电压矢量,改进DTC的控制性能。然而,传统DTC仅用6个中矢量作为备选电压矢量,并未充分发挥OW-PMSM系统的优势。因此本文重构19个零序电压为0的电压矢量,并基于此改进零序电流抑制方法,针对共直流母线型OW-PMSM分别提出结合重构电压矢量和改进零序电流抑制方法的五位滞环控制器DTC和无滞环控制器的改进DTC,以减小电机的转矩脉动。
3.1 重构电压矢量
根据1.3节的分析,各小矢量均存在零序电压为‘dc/3’或‘-dc/3’的开关状态组合,同时各大矢量的零序电压也为‘dc/3’或‘-dc/3’,因此可用大、小矢量共同形成一组零序电压为0的重构电压矢量。由于开关状态的冗余性,选择一组大、小电压矢量,其相邻零序电压正负相间,且其零序电压绝对值为dc/3。为方便后续分析,本文选择图2中被标为红色和绿色的大、小矢量,其中所有红色电压矢量的零序电压均为+dc/3,所有绿色电压矢量的零序电压均为-dc/3。
图3a为扇区A的重构电压矢量转化关系图。当23′和14′各作用半个控制周期时,其重构合成的电压矢量1分布在23′和14′连线的中点位置,又由于23′和14′的零序电压分别为+dc/3和-dc/3,此重构的电压矢量的零序电压刚好为0。同理,14′和25′可重构为电压矢量2,23′和34′可重构为电压矢量3,25′和34′可重构为电压矢量4,它们均分布在两个基本电压矢量的中点位置,且零序电压均为0。这样,扇区A中4个零序电压非零的电压矢量被转化为4个零序电压为0的重构电压矢量。

图3 重构电压矢量分布
从图2可知,共直流母线型OW-PMSM系统的电压矢量平面分布具有以零矢量为中心的60°旋转对称性,因此其余5个扇区电压矢量的重构方式类似,可得到18个非零的重构电压矢量。转化后的电压矢量平面同样需要零矢量,为尽可能地统一重构电压矢量的转换原则,且保证所有重构电压矢量的零序电压均为0,重构零电压矢量通过零序电压为dc的87′和零序电压为-dc的78′各作用半个控制周期得到。因此,重构电压矢量平面分布如图3b所示,共存在19个零序电压为0的重构电压矢量,所有重构电压矢量对应的转化关系总结于表2。
表2 重构电压矢量对应转化关系

Tab.2 Corresponding transformation relationship of reconstructed voltage vector
3.2 基于重构矢量的改进零序电流抑制方法
根据式(10)分析,为了抑制系统的零序电流,需为系统提供一定的零序电压。从表2可知,用于转化非零重构电压矢量的基本电压矢量,其零序电压均为±dc/3。为提供合适的零序电压,需令两个基本电压矢量存在一定的作用时间差,对于非零的重构电压矢量而言,根据伏秒特性可得

而对于重构零电压矢量而言,根据伏秒特性,则有


基于此,本文提出一种与重构电压矢量相对应的基于作用时间差的改进零序电流抑制方法。为生成所需参考零序电压矢量,需使零序电压为正的基本电压矢量在一个控制周期中作用s/2+Δ时间,同时使零序电压为负的基本电压矢量作用s/2-Δ时间,以达到有效抑制电机零序电流的目的。
3.3 基于五位转矩滞环控制器的改进DTC策略
将基本电压矢量平面转化为重构电压矢量平面,并结合基于重构电压矢量的改进零序电流抑制方法,使得扩大共直流母线型OW-PMSM直接转矩控制中的备选电压矢量范围成为可能。传统DTC中有限的转矩滞环控制器输出成为扩大电压矢量选择范围的约束,为充分利用所有重构电压矢量,可引入五位转矩滞环控制器。
五位转矩滞环控制器共有“±2”、“±1”、“0”五种输出。当输出为“±2”时,从图3中黄色重构电压矢量中选择一个矢量;当输出为“±1”时,从图3中灰色重构电压矢量中选择一个矢量;当输出为“0”时,则选择重构电压矢量0,电压矢量选择表见表3。由表3可看出,引入五位转矩滞环控制器后,共直流母线型OW-PMSM DTC中所有重构电压矢量均可被选择。
表3 五位转矩滞环控制器改进DTC电压矢量选择表

Tab.3 Voltage vector selection table of improved DTC based on five-level torque hysteresis controller
3.4 无滞环控制器的改进DTC策略
由于滞环控制器本身的特性,基于滞环控制器的DTC策略仍存在较大转矩脉动,为进一步抑制转矩脉动,本文同时提出一种结合重构电压矢量和改进零序电流抑制方法的不含滞环控制器的改进DTC策略。
在所提出的改进DTC策略中,对OW-PMSM转矩和磁链幅值的控制通过对定子磁链矢量的控制来实现。根据转矩式(7),由于零序电流可被有效抑制,同时电机3次磁链的值相对较小,因此式(7)中第三项可忽略。当电机的给定转矩改变时,其变化量可以转化为所需功角的变化量Δδ,它可通过给定转矩与实际转矩的误差经转矩PI调节器输出得到[24]。由于在DTC系统中,参考磁链幅值通常设置为恒定,结合所需功角的变化量Δδ,参考定子磁链可确定。转矩及磁链控制过程如图4所示。

图4 转矩及磁链控制过程
当参考定子磁链矢量确定后,在一个控制周期内,所需的定子磁链矢量增量为

当所需定子磁链矢量增量确定后,参考电压矢量可表示为
为完成参考电压矢量的区域定位,实现区域与重构电压矢量的一一对应,方便重构电压矢量选择,本文设计了一种新的区域划分方式,如图5所示。图中将a-b-c轴逆时针旋转30°并定义为a′-b′-c′轴,每个轴有两条区域分割线。以a′轴为例,其中一条区域分割线位于3和6在a′轴投影的中点,即

式中,l表示a′轴上的其中一条区域分割线。


将转换后的结果代入式(19),可得到所属区域标志位组合,实现对参考电压矢量ref的区域定位,即可根据区域标志位组合与重构电压矢量的对应关系选择相应的重构电压矢量。区域标志位所对应的重构电压矢量选择表见表4。
表4 改进DTC重构电压矢量选择表
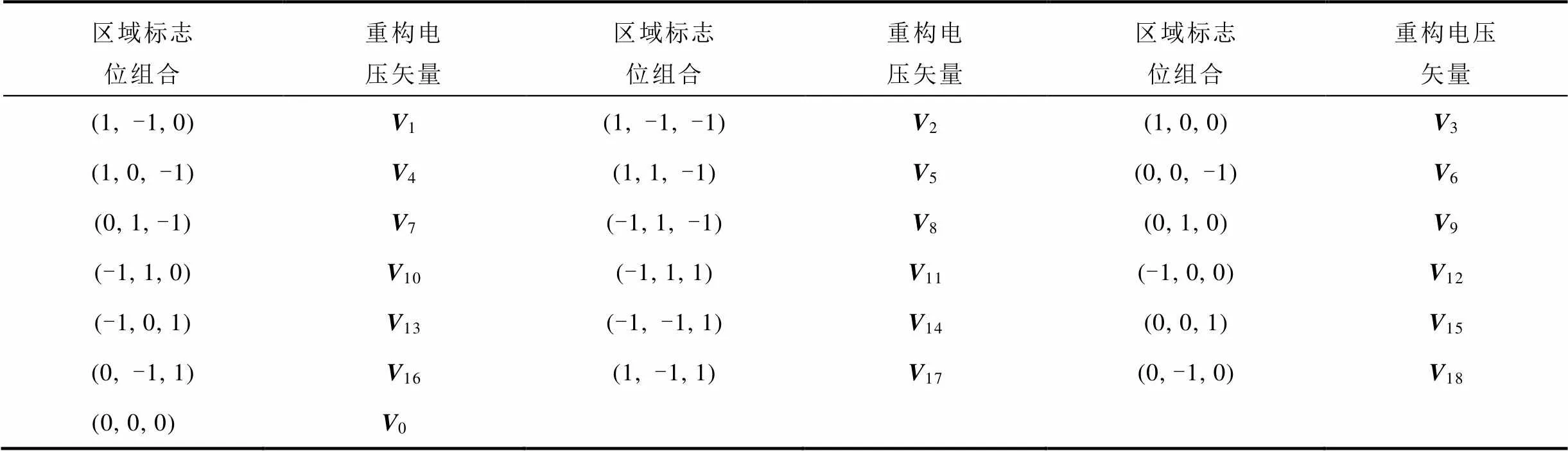
Tab.4 Reconstructed voltage vector selection for improved DTC
由表4可以看出,改进DTC策略的备选电压矢量范围同样被扩大,可充分利用共直流母线型OW-PMSM系统产生的电压矢量。当选好重构电压矢量,并结合3.2节中的改进零序电流抑制方法,可确定每个基本电压矢量的作用时间,生成驱动信号。整个无滞环控制器改进DTC的控制框
图如图6所示。

图6 改进DTC策略框图
4 实验验证
本文通过实验研究比较基于零矢量插入的传统DTC(策略Ⅰ)、基于五位转矩滞环控制器的改进DTC(策略Ⅱ)和无滞环控制器改进DTC(策略Ⅲ)三种策略的控制性能。实验中以TMS320F28335的DSP作为系统的控制芯片,直流母线电压dc=60V,PMSM参数s=1.35Ω,d=5.86mH,q=11.05mH,0=4.68mH,f=0.154 7Wb,3f=0.003 2Wb,p=4,电机额定转速N=750r/min, 额定转矩LN=3N·m, 额定功率250W, 额定电压70V, 额定电流2.2A,系统采样周期s=100μs。为了确保对比实验的公平性,本文所有实验均采用相同的转速环PI参数:p=6,i=0.01。
4.1 稳态性能分析
图7比较了三种策略的稳态性能,电机参考转速为500r/min,负载转矩为3N·m。从图7可知,三种策略的转矩脉动分别为1.19N·m、0.82N·m和0.5N·m。相比策略Ⅰ,策略Ⅱ和Ⅲ的转矩脉动抑制效果更好,其中策略Ⅲ的抑制效果最明显。充分证明了本文所提的基于重构电压矢量的改进直接转矩控制方案在转矩脉动抑制效果上的优越性。

图8为三种策略的三相及零序电流波形,以及相电流的FFT分析。由图8可知,三种策略均具有较好的零序电流抑制效果,验证了所提出的基于重构矢量的改进零序电流抑制方法的有效性。三种策略的电流THD分别为24.69%、21.98%和13.16%,其中,策略Ⅲ因摒弃了滞环控制器而提高了所选电压矢量的精度,谐波消除效果最明显。
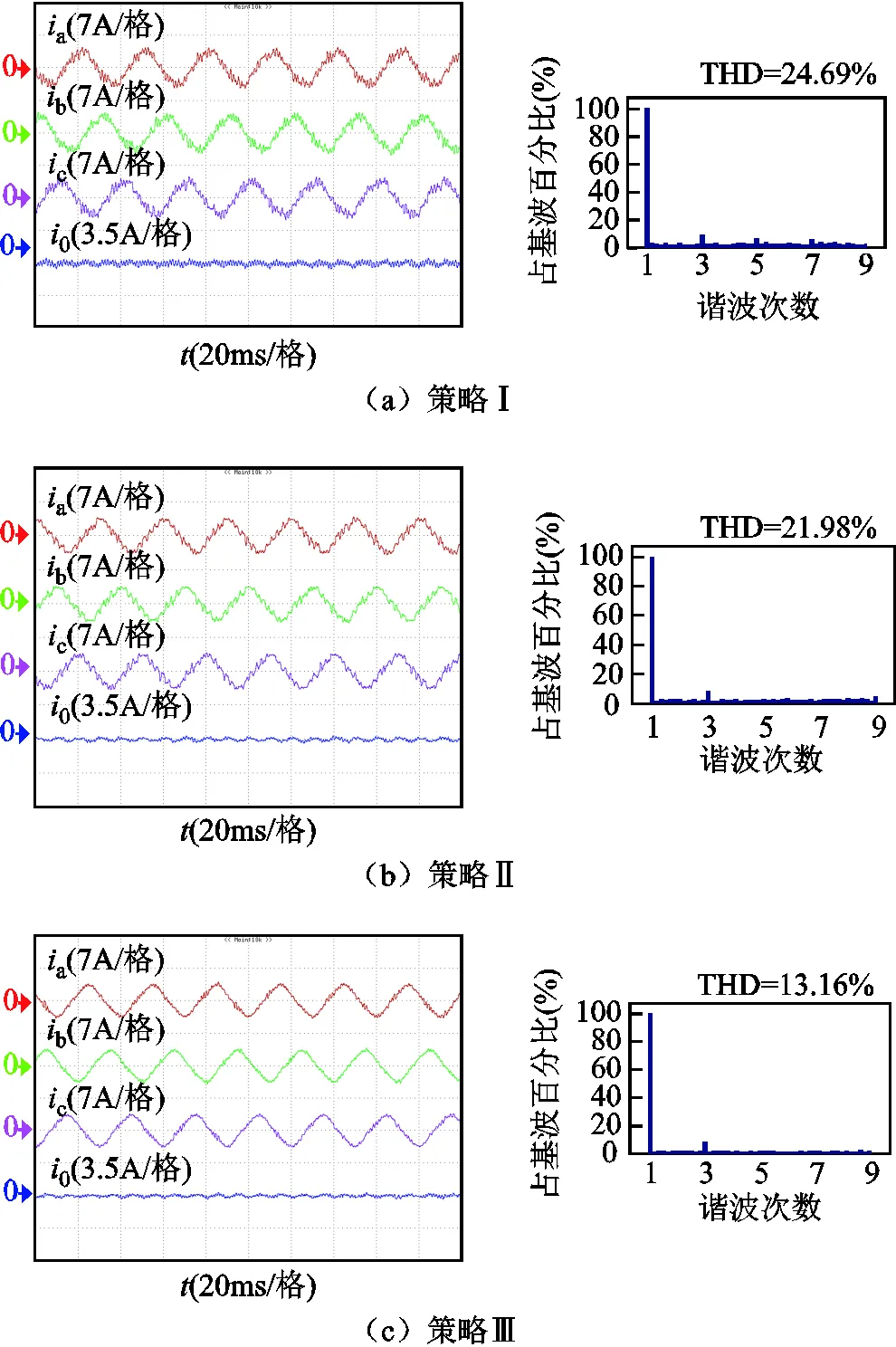
图8 三种策略的电流波形及其FFT分析
4.2 动态性能分析
图9展示了三种策略的动态性能,包含转速和转矩响应。转速动态实验中,将转速给定从250r/min突增至750r/min,电机空载运行。由图9可看出三种策略均经过0.9s后使电机稳定在新的给定转速,整个加速过程中电机均以最大输出转矩加速。转矩动态实验中,电机给定转速为500r/min,负载转矩从0突增至3N·m。根据图9分析可知,在负载突增时,电机转速有短暂的微小跌落,三种策略均经过1.15s后使电机稳定输出给定负载转矩。因此,所提改进策略与传统DTC具有同样优异的转速和转矩动态性能。同时可以发现,无论是转速还是转矩的动态过程,策略Ⅱ和策略Ⅲ均呈现出较低的转矩脉动和较小的零序电流,说明所提改进策略在动态过程同样具有较好的转矩脉动和零序电流的抑制能力。
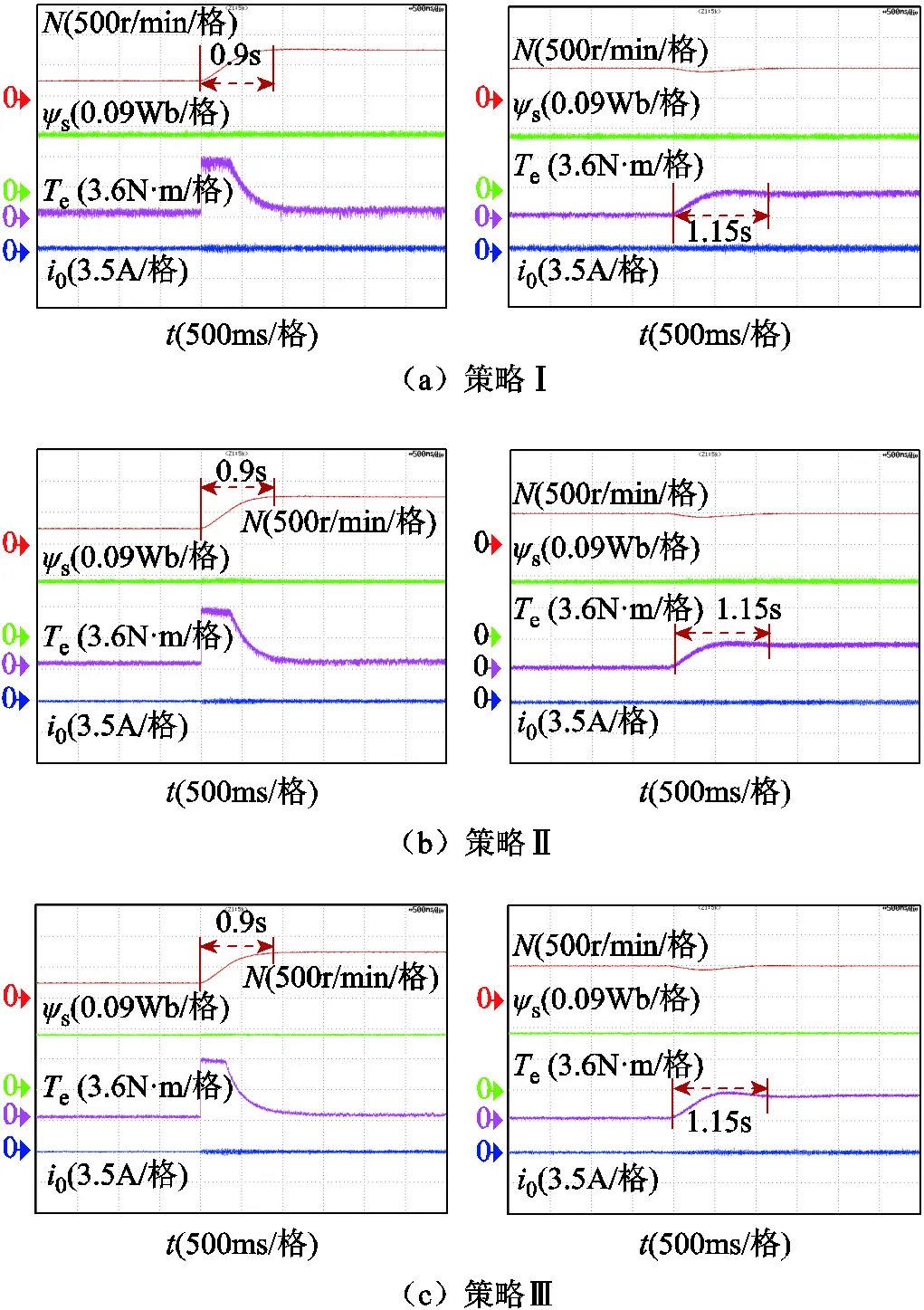
图9 三种策略的动态性能(左:空载突增转速,右:恒速突增转矩)
5 结论
本文提出了基于重构电压矢量的共直流母线型OW-PMSM改进DTC策略,主要贡献如下:
1)定义了零序电压为零的重构电压矢量,基于重构矢量改进了零序电流的抑制方法,扩大了DTC的备选电压矢量范围,充分发挥了共直流母线型OW-PMSM系统可提供多个电压矢量的特点。
2)结合重构电压矢量和改进零序电流抑制方法,引入了五位转矩滞环控制器,有效抑制了共直流母线型OW-PMSM传统DTC中的转矩脉动。
3)基于重构电压矢量和改进零序电流抑制方法,定义了新的区域划分方式,提出了不含滞环控制器的改进DTC策略,提高了电压矢量选择精度,进一步减小了转矩脉动。
4)实验结果验证了所提改进控制策略对降低转矩脉动和电流谐波、抑制零序电流的有效性和优越性。
[1] 李昱, 郭宏, 平朝春, 等. 基于电流源变流器的永磁同步电机驱动系统全状态变量预测转矩控制[J]. 电工技术学报, 2021, 36(1): 15-26.
Li Yu, Guo Hong, Ping Zhaochun, et al. A full-state variable predictive torque control of current source converter fed permanent magnet synchronous motor drives[J]. Transactions of China Electrotechnical Society, 2021, 36(1): 15-26.
[2] He Mingjie, Li Weiye, Peng Jun, et al. Multi-layer quasi three-dimensional equivalent model of axial-flux permanent magnet synchronous machine[J]. CES Transactions on Electrical Machines and Systems, 2021, 5(1): 3-12.
[3] Cui Fengrui, Sun Zhaolong, Xu Wei, et al. Comparative analysis of bilateral permanent magnet linear synchronous motors with different structures[J]. CES Transactions on Electrical Machines and Systems, 2020, 4(2): 142-150.
[4] 陈文汉, 孙丹, 王铭泽. 断相故障下开绕组永磁同步电机模型预测控制容错控制策略研究[J]. 电工技术学报, 2021, 36(1): 77-86.
Chen Wenhan, Sun Dan, Wang Mingze. Research on fault-tolerance strategy based on model predictive control for open-winding PMSM system under open-phase fault[J]. Transactions of China Electrotechnical Society, 2021, 36(1): 77-86.
[5] 张晓光, 闫康, 张文涵. 开绕组永磁同步电机混合双矢量模型预测控制[J]. 电工技术学报, 2021, 36(1): 96-106.
Zhang Xiaoguang, Yan Kang, Zhang Wenhan. Hybrid double vector model predictive control for open-winding permanent magnet synchronous motor with common DC bus[J]. Transactions of China Electrotechnical Society, 2021, 36(1): 96-106.
[6] 孙丹, 林斌, 周文志. 开绕组电机系统拓扑及控制技术研究综述[J]. 电工技术学报, 2017, 32(4): 76-84.
Sun Dan, Lin Bin, Zhou Wenzhi. Overview of topology and control technology of open winding motor system[J]. Transactions of China Electrotechnical Society, 2017, 32(4): 76-84.
[7] 林晓刚, 黄文新, 姜文, 等. 共母线开绕组永磁同步电机缺相容错型直接转矩控制[J]. 电工技术学报, 2020, 35(24): 5064-5074.
Lin Xiaogang, Huang Wenxin, Jiang Wen, et al. Fault- tolerant direct torque control for open-end winding permanent magnet synchronous motor with common DC bus under open phase circuit[J]. Transactions of China Electrotechnical Society, 2020, 35(24): 5064-5074.
[8] Lee Yongjae, Ha Jung-lk. Hybrid modulation of dual inverter for open-end permanent magnet synchronous motor[J]. IEEE Transactions on Power Electronics, 2015, 30(6): 3286-3299.
[9] 年珩, 阮晨辉, 何峪嵩, 等. 基于Z源逆变器的共直流母线开绕组永磁同步电机系统控制策略[J]. 中国电机工程学报, 2019, 39(18): 5509-5519, 5599.
Nian Heng, Ruan Chenhui, He Yusong, et al. Control strategy for open-winding PMSM system with common DC bus based on Z-source inverters[J]. Proceedings of the CSEE, 2019, 39(18): 5509-5519, 5599.
[10] 杨帆, 金鑫, 沈煜, 等. 基于零序导纳变化的灵活接地系统接地故障方向判别算法[J]. 电力系统自动化, 2020, 44(17): 88-94.
Yang Fan, Jin Xin, Shen Yu, et al. Ground fault direction discrimination algorithm for flexible grounding system based on zero sequence admittance change[J]. Automation of Electric Power Systems, 2020, 44(17): 88-94.
[11] 韦明杰, 石访, 张恒旭, 等. 基于零序电流波形区间斜率曲线的配电网高祖接地故障检测[J]. 电力系统自动化, 2020, 44(14): 164-171.
Wei Mingjie, Shi Fang, Zhang Hengxu, et al. High voltage grounding fault detection of distribution network based on zero sequence current waveform interval slope curve[J]. Automation of Electric Power Systems, 2020, 44(14): 164-171.
[12] Nian Heng, Ruan Chenhui, He Yusong, et al. Control strategy for open-winding PMSM system with common DC bus based on Z-source inverters[J]. Proceedings of the CSEE, 2019, 39(18): 5509-5519, 5599.
[13] 年珩, 曾恒力, 周义杰. 共直流母线开绕组永磁同步电机系统零序电流抑制策略[J]. 电工技术学报, 2015, 30(20): 40-48.
Nian Heng, Zeng Hengli, Zhou Yijie. Zero sequence current suppression strategy for open winding permanent magnet synchronous motor with common DC bus[J]. Proceedings of the CSEE, 2015, 30(20): 40-48.
[14] Sun Dan, Chen Wenhan, Cheng Yifei, et al. Improved direct torque control for open-winding PMSM system considering zero-sequence current suppression with low switching frequency[J]. IEEE Transactions on Power Electronics, 2021, 36(4): 4440-4451, 4647.
[15] Yuan Xin, Zhang Shuo, Zhang Chengning, et al. Improved finite-state model predictive current control with zero-sequence current suppression for OEW-SPMSM drives[J]. IEEE Transactions on Power Electronics, 2020, 35(5): 4996-5006.
[16] 陈浩, 和阳, 赵文祥, 等. 基于占空比调制的五相容错永磁游标电机直接转矩控制[J]. 电工技术学报, 2020, 35(5): 1055-1064.
Chen Hao, He Yang, Zhao Wenxiang, et al. Direct torque control of five-phase fault-tolerant permanent magnet vernier motor based on duty cycle modulation[J]. Transactions of China Electrotechnical Society, 2020, 35(5): 1055-1064.
[17] 张晓光, 张亮, 侯本帅. 永磁同步电机优化模型预测转矩控制[J]. 中国电机工程学报, 2017, 37(16): 4800-4809.
Zhang Xiaoguang, Zhang Liang, Hou Benshuai. Improved model predictive torque control of permanent magnet synchronous motor[J]. Proceedings of the CSEE, 2017, 37(16): 4800-4809.
[18] Wang Mingze, Sun Dan, Ke Weihuang, et al. A universal lookup table-based direct torque control for OW-PMSM drives[J]. IEEE Transactions on Power Electronics, 2021, 36(6): 6188-6191.
[19] Lin Xiaogang, Huang Wenxin, Jiang Wen, et al. Direct torque control for three-phase open-end winding PMSM with common DC bus based on duty ratio modulation[J]. IEEE Transactions on Power Electronics, 2020, 35(4): 4216-4232.
[20] Suresh Lakhimsetty, Venkata Siva Prasad Setelli, Rajjendra Singh Rathore, et al. Multilevel torque hysteresis-band based direct-torque control strategy for a three-level open-end winding induction motor drive for electric vehicle applications[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2019, 7(3): 1969-1981.
[21] Ravi Eswar Kodumur Meesala, Vinay Kumar Thippiripati. An improved direct torque control of three-level dual inverter fed open-ended winding induction motor drive based on modified look-up table[J]. IEEE Transactions on Power Electronics, 2020, 35(4): 3906-3917.
[22] Wang Mingze, Sun Dan, Zheng Zhihao, et al. A novel lookup table based direct torque control for OW-PMSM drives[J]. IEEE Transactions on Industrial Electronics, DOI: 10.1109/TIE.2020. 3018067.
[23] 范文进, 郑琼林, 杨中平, 等. 一种中高速区转矩优化的异步电机直接转矩控制算[J]. 中国电机工程学报, 2016, 36(1): 240-249.
Fan Wenjin, Zheng Qionglin, Yang Zhongping, et al. A direct torque control algorithm of asynchronous motors with torque optimization in medium and high speed regions[J]. Proceedings of the CSEE, 2016, 36(1): 240-249.
[24] Wang Zheng, Wang Xueqing, Cao Jiawei, et al. Direct torque control of T-NPC inverters-fed double-stator-winding PMSM drives with SVM[J]. IEEE Transactions onPower Electronics, 2018, 33(2): 1541-1553.
Reconstructed Voltage Vector Based Improved Direct Torque Control Strategy for Open-Winding Permanent Magnet Synchronous Motor with Common DC Bus
Sun Dan Zhao Chen Ke Weihuang Wang Mingze Nian Heng
(College of Electrical Engineering Zhejiang University Hangzhou 310027 China)
Aiming at the characteristics of open-winding permanent magnet synchronous motor (OW-PMSM) with common DC bus, such as abundant basic voltage vectors and the existence zero sequence circuit, this paper proposed an improved direct torque control strategy based on the reconstructed voltage vector for OW-PMSM with common DC bus. In order to make full use of the voltage vectors generated by OW-PMSM, 19 reconstructed voltage vectors were defined. And based on this, the zero-sequence current suppression method was improved to expand the range of candidate voltage vectors for direct torque control (DTC). According to the characteristics of reconstructed vectors, such as abundant numbers and different amplitudes, a five-bit torque hysteresis controller was introduced into DTC to suppress the torque ripple. Aiming at the problem of limited control precision of hysteresis controller, a new region division method was defined and the corresponding reconstructed voltage vector selection table was established. By locating the reference voltage vector, the reconstructed voltage vector could be selected accurately. The experimental results verify the feasibility and superiority of the proposed control strategy.
Open winding permanent magnet synchronous motor, common DC bus, direct torque control, zero sequence current suppression
10.19595/j.cnki.1000-6753.tces.211481
TM351
孙 丹 女, 1975年生, 教授, 博士生导师, 研究方向为交流电机高性能控制策略和双馈风力发电技术。E-mail:sundan@zju.edu.cn(通信作者)
赵 琛 男, 1997年生, 博士研究生, 研究方向为交流电机高性能控制策略和新能源发电并网技术。E-mail:eezhaochen@zju.edu.cn
2021-09-18
2021-10-12
国家自然科学基金资助项目(51877197)。
(编辑 郭丽军)