涵道三角翼无人机设计与实现
2022-04-08关舒婷钟小华黄衍锦李瑞清
关舒婷 钟小华 黄衍锦 李瑞清
(广东白云学院,广东 广州 510450)
0 引言
现有无人机多为固定翼型无人机和多旋翼型无人机。多旋翼无人机具有垂直起降的功能,起降时对场地的要求较低,但其噪声大、续航能力低且载重量轻;传统固定翼无人机续航时间长、载重量大,但飞行速度低且起降时对场地的要求较高,因此二者的缺点在一定程度上限制了无人机的应用范围。涵道三角翼无人机的旋翼与普通无人直升机裸露的旋翼不同,涵道三角翼无人机的旋翼被涵道包裹,涵道不仅可以提高旋翼螺旋桨的效率,而且还可以降低旋翼自身的气动噪声,在屏蔽涵道风扇噪声的同时,还可以保障工作人员的人身安全。该项目结合二者的优点设计了一种基于融合翼身的全新涵道空气流推进飞行无人机。翼身融合三角翼布局,具有大升力、大空间且气动阻力低的特点,可实现短距起降、大载重和长续航的功能。通过飞行控制系统辅助功能可以降低无人机的操控难度。因为该无人机具有制作与使用成本低、安全风险系数小以及灵活等优点,所以其可以在物流、农业、测绘、电力巡检、安全巡逻以及应急救援等重要领域中发挥作用。
1 涵道三角翼无人机的整体设计
无人机由机体、动力系统和飞控系统组成。采用SOLIDWORKS建立的无人机三维建模如图1所示,相关参数见表1。整机采用三角形稳定机构翼身融合的气动布局,外形上机翼与机身融为一体,无人机整体都具有平突翼型的横截面,在飞行中有更大、更有效的升力面积。动力系统是在管道内由2个平行的螺旋桨对向旋转组成涵道共轴反桨的动力套装,还搭载了自动驾驶飞行控制系统。

图1 涵道三角翼无人机模型

表1 涵道三角翼无人机参数
2 涵道三角翼无人机结构
2.1 翼身外形
普通的固定翼无人机的平衡性无法满足涵道动力系统较高的平衡性需求,而三角形翼身融合的气动布局有更大的有效升力面积。同时,三角机头和机头进气道可以进一步减少空气阻力,增加无人机的平衡性。因此,该项目让传统的机身和机翼呈流线形平滑过渡融合,使全机具有升力体的翼型横截面,无尾结构缩小了机体的浸润面积和空气的摩擦面积,从而达到一定的减阻效果。无人机结构的布局特点如下:1) 减轻结构质量。结构质量均匀地分布于机翼翼展,可以降低机翼的弯曲度以及扭转载荷。超宽短机身设计使结构更紧凑、刚性更好且强度更高,从而加大运载量。2) 隐蔽性强。因为无尾布局没有显著的横向操纵面,所以可以缩小雷达反射面,机载设备设置在机体内,不仅具有更好的隐藏性,而且还可以提升无人机的作战力(可以在军事领域中应用该无人机)。3) 提高空气动力效率。平滑过渡流线形翼身可以削弱传统布局翼身间的干扰阻力和诱导阻力,从而提高升力。4) 有较高的经济效益。在满足飞行设计要求的情况下,无尾部的操纵面及翼身融合布局,可以使应力变小,并节约生产成本(降低使用周期的维修保养费用),从而提高其经济效益。
2.2 机翼选型
无尾式翼身融合布局存在舵面操作效能不足的问题,需要增大操纵舵面。因为该项目所设计的无人机需要具备短距起降以及长航时飞行的能力,所以要选择一款满足高升阻比要求且厚度较大的翼型。在Profili翼型库软件中以飞行环境高度100 m、速度20 m/s为模拟环境,最终计算得到雷诺数=50 900。在上述飞行环境中对各种翼型的升阻比曲线、俯仰力矩曲线以及性能参数进行对比可以发现,在相同情况下,当仰角=4°时, 63-137翼型的升力系数的最大值=1.8,升阻比最大/=128。FX 63-137翼型与其他翼形相比,其升阻比和升力系数最大。综合考虑选用具有明显优势的FX 63-137翼型,其最大机翼弦长为600 mm,最小机翼弦长为80 mm,间隔为100 mm,最终得到翼展为1 400 mm。为了达到减少空间、简化安装流程的目的,涵道三角翼无人机采用模块化结构设计,分为机身涵道、左机翼以及右机翼3个模块。
3 性能分析
3.1 动力系统
无人机采用2个平行的GTS2306 V2-1800无刷电机搭配PC 51499-3螺旋桨对向旋转和60 A电子调速器构成涵道共轴反桨结构作为动力装置。因为双层桨叶共用一个传动轴,但是其转动方向相反,所以可以平衡单向转动偏转力矩,达到短距离起降的目的。由于动力系统被涵道环扩,因此会缩小整体飞行器的发动机热辐射扩散范围,三角机头结合涵道共反浆旋翼结构设计可降低空气阻力,平滑椭圆大唇口进气具有更大的进气量和排气量,气流密度更高,旋翼被涵道包裹,不但能够提高旋翼螺旋桨的效率,而且这种结构可以降低旋翼自身的气动噪声,还可以发挥保护人身安全的作用。共轴反桨结构设置在圆筒形机身内部,可以集中气流,使方向更明确,从而有效地减少螺旋桨边缘的涡流损失,进而使螺旋桨为无人机提供更高的升力效率。综合考虑安全性和成本,研究人员在涵道唇口处安装塑料滤网套。通过Solidworks flow Simulation进行仿真结果,如图 2 所示。该系统可以消除螺旋桨旋转所产生的反扭力矩,将无人机的操纵性能与传统单发单螺旋桨固定翼飞行器进行比较可知,无人机在提升操纵性能的同时,还能提高飞机的推力(大约提高50%),从而实现短距离起降、高速飞行、易操控以及噪声低的功能。
涵道唇口是影响涵道动力系统的重要因素。当共轴反桨高速旋转时,涵道唇口处会产生绕流,并形成低压区,气流从高压流向低压,使涵道产生附加拉力。因为涵道唇口半径会影响涵道入口处的绕流环境、静压分布以及共轴反桨的顺逆螺旋桨的拉力分配,合理地增大涵道唇口半径可以提高涵道的升力。假设唇口高度d=40 mm,厚度d=25 mm,通过模拟对无来源、轴向来源以及横风来源三种环境进行分析,唇口斜率、流量系数以及推力系数如公式(1)~公式(3)所示。

式中:为通过唇口捕获的体积流量,m/s;为出口面积,m;为出口压力,Pa;为气流密度,kg/m;为唇口推力,N。
由上述结果可知,椭圆形唇口的综合性能最好,唇口斜率越小,唇口的推力系数、流量系数就越大。由于螺旋桨与涵道内壁的间隙增大会降低涵道的增升效应,因此需要缩小螺旋桨与涵道之间的间隙(大约缩小1 mm~2 mm),以增加涵道对无人机整体的拉力。涵道共轴反桨结构的桨距会影响左、右旋翼拉力的分配情况。当桨距增大时,左旋翼拉力、总控力变小,右旋翼拉力逐渐增大。由能量守恒可知,左旋翼气动特点如公式(4)~公式(5)所示。

式中:为左旋翼的拉力,N;为左旋翼的扭矩,N·m;为涵道的诱导速度,m/s;为涵道的气流速度,m/s;为滑流速度,m/s;为涵道面积,m;为进口空气密度,kg/m;为拉力分配因子。
右旋翼气动特点如公式(6)~公式(7)所示。

式中:为右旋翼的拉力,N;为右旋翼的扭矩,N·m;为右桨对左桨的诱导速度影响系数;为左桨对右桨的诱导速度影响系数(和都是关于桨距的函数)。
因为双桨扭矩相互抵消(=),所以当螺旋桨旋转时,桨盘面产生诱导速度,右桨处在左桨的尾流中,将左桨尾流作为吸流,彼此间的诱导速度相互影响。
由叶素-动量理论可以得到非线性一次微分方程组,如公式(8)所示。

式中:为双桨桨距,m;,分别为左、右旋翼的螺距,m。
综上可得,当左旋翼位于涵道175 mm处、双桨桨距为233 mm~234 mm时,其升力效果最好。涵道内部流速线如图 2 所示。
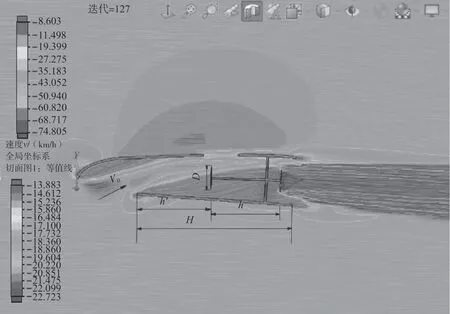
图2 涵道内部流速线图
3.2 飞行控制系统
飞行控制系统可以自动调整无人机的航向、高度、速度以及飞行姿态,配合GPS+北斗双模定位模块可以使无人机实现自动航线飞行以及自动返航的功能。
如图3所示,无人机的飞行控制模块采用基于STM32F7芯片的自动驾驶仪,飞控模块内置电子陀螺仪、气压计以及加速度传感器等测量设备,当收到来自遥控器的遥控信号或需要对飞行姿态进行调整时,PWM给电子调速器发送指令,对电机转速、控制面活动的偏转角度进行调节,实现对无人机飞行姿态的控制和调整。该飞行控制模块可以为飞控工作提供无人机当前的飞行姿态、高度、速度以及航向等数据;同时,安装接收机、GPS定位以及图传等通信装置,可实时接收遥控器信号并发送图像信息以及位置信息。

图3 飞控控制系统框架
3.3 信号传输系统
该项目设计的无人机信号传输系统采用无线电传输,不同频段分别传输不同种类的信号。使用2.4 GHz频段传输控制信号,使无人机保持手动飞行的能力;915 Hz数传电台连接地面站和天空端,使飞手能实时了解无人机当前的飞行状态;5.8 GHz数字图传系统能提供延迟低至20 ms的图像,且分辨率能达到1920 px×1080 px,为飞手提供无人机前方的清晰图像,为超视距飞行提供最基础的保障。
4 涵道三角翼无人机气动仿真分析
涵道三角翼无人机在Solidworks中进行flow Simulation流体分析,模拟环境如下:温度为300 K,空速为 20 m/s,仿真环境气体为空气,风扇转速为966 r/s。在仰角为4°的情况下对其升力、表面压力以及阻力进行分析。经过气动仿真计算结果可知,全机能产生约24.079 N的升力,满足设计要求。
5 结语
该项目设计的涵道三角翼无人机经过多次测试,当起飞质量为2.1 kg时,起飞滑跑距离约为6 m,飞行最小速度为10 m/s,飞行最大速度为40 m/s,搭载ace 6s30C动力电池测得续航时间约为40 min。在空旷区域中,飞行控制系统辅助功能正常,可实现定高定速盘旋飞行、自动姿态修正以及自动返航的功能,具有大升力、大空间以及低阻力的特性,可以有效地解决多旋翼无人机续航短、载重轻以及传统固定翼无人机速度低的问题,满足起降对跑道要求高的要求。
