智能网联车辆队列紧急工况控制策略设计*
2022-04-07李鹏飞罗禹贡孔伟伟
李鹏飞,罗禹贡,刘 畅,孔伟伟,2
(1.清华大学车辆与运载学院,汽车安全与节能国家重点实验室,北京 100084;2.中国农业大学工学院,北京 100083)
前言
日益增长的交通运输需求使人们面临越来越严峻的交通拥堵、道路安全和环境污染等问题。智能网联车辆队列具有显著提高行车安全性、改善燃油经济性、提升道路通行效率、提高运输能力等优势,已成为国内外汽车学术界和产业界的研究热点。现有队列研究主要集中在队列稳定性、节能性控制,或是组队、入队、离队控制策略研究,但缺乏针对紧急工况的车辆队列控制研究。在实际应用中,高速公路车辆队列不可避免会面临被其他车辆干扰或需要紧急制动的紧急工况。因此,针对紧急工况开展车辆队列控制研究具有重要意义,也是车辆队列迈向产业化应用必须解决的难题。
队列紧急制动和他车插入队列是很危险的两种紧急工况。当一辆车以大于4 m/s的减速度进行制动时,被认定为处于紧急制动状态。因道路或交通原因,队列中任一车辆触发紧急制动,导致其后方所有跟随车辆也要进行紧急制动,这种工况称为队列紧急制动。Zheng等指出,当队列车辆制动能力相同时,仅依靠驾驶员采取制动措施的事故率很高。他车插入队列,则指某一非队列车辆突然驶入队列车辆之间的工况。这种情况下非队列车辆的行为对于队列车辆来说有很强的不确定性,车辆队列在稳定行驶状态下的控制策略不再适用,如果不调整控制策略很有可能出现危险。
比较早的一些队列制动相关的研究,如文献[6]和文献[7],常常采用与队列稳定行驶相同的控制算法进行制动,讨论队列紧急制动时的控制效果。文献[8]和文献[9]中虽然提出了一些新的方法,但是还不适用于实际情况。Liu等采用虚拟的方法进行队列紧急制动控制,但该研究没有利用车间通信进行协同感知,对于紧急工况的反应相对滞后。Lu等提出了一种以总碰撞能量最小为控制目标的MPC方法,然而MPC方法对算力的要求很高,而且该研究仅采用简单的质点动力学模型,也不符合实际应用场景。还有的研究针对实际应用场景设计了控制策略,却并没有进行控制系统的开发,也未考虑与其他工况的切换控制。有的研究设计了队列制动的控制策略并完成了实车实验,但在仿真和实验中考虑的制动减速度都比较小(不超过-3.5 m/s),不适用于队列紧急制动工况。
关于他车插入队列,目前相关的研究还比较少,大部分研究都只考虑单车面临其他车辆并道进入自车前方的场景。Xie等定义了一个接近指数,用于评估并道场景下的碰撞风险。Zhou等用最优控制方法研究了并入车辆和直行车辆的速度规划。另一部分研究关注了并线车辆对于车辆的巡航控制的影响,却没有能在队列场景下考虑问题。蔡英凤等针对自适应巡航控制系统受旁车并线影响产生的制动干预时机不确定性问题,提出了一种采用旁道车辆并线行为进行优化的自适应巡航控制策略。张涛等用一种基于NAR神经网络学习的迭代循环预测算法计算出旁车的横向换道轨迹,并提出了一种考虑并线概率的跟车距离策略。此外,Vissers等虽然给出了一种应对他车插入队列的控制策略,但是并没有进行控制系统的开发,也没有考虑与其他工况的切换控制。
综上所述,目前针对他车插入队列工况下的控制研究较少,面向队列紧急制动和他车插入队列这两种紧急危险工况的车辆队列控制策略研究尚不成熟,更缺少紧急工况与非紧急工况之间的控制切换研究。因此,本文旨在面向高速公路场景提出车辆队列紧急工况下的控制策略及控制系统。首先,建立车辆控制系统分层架构。其次,针对策略层设计两种紧急工况的控制策略和不同工况间的控制切换策略。最后,搭建PreScan/Simulink联合仿真平台,进行五车队列在紧急工况下的仿真验证,并讨论通信时延对控制性能的影响。
1 车辆队列控制系统分层架构
国外较早地对汽车队列开展研究,比如美国PATH项目、荷兰GCDC项目、欧洲ENSEMBLE项目等。以上项目中,车辆队列控制系统均采用了分层架构,该种架构具有结构清晰、功能划分明确的优点。借鉴分层架构的设计思路,本研究建立如图1所示的车辆队列控制系统分层架构,将整个控制系统划分为策略层和控制层。
如图1所示,策略层接收毫米波雷达、摄像头等传感器信息以及V2V通信信息,根据制定的控制策略判断队列所处的工况,包括非紧急工况、队列紧急制动、他车插入队列,并根据所设计的各工况下队列控制策略以及不同工况间控制切换策略,选择出合适的车辆纵、横向控制器,发送给控制层。
图1 系统分层架构示意图
控制层由多种车辆纵、横向控制器组成。其中,协同自适应巡航CACC(cooperative adaptive cruise control)、自适应巡航ACC(adaptive cruise control)、自动紧急制动AEB(autonomous emergency braking)、队列紧急制动PEB(platoon emergency braking)、车间距调整GA(gap adjustment)这5个控制器用于实现车辆的纵向控制,车道居中控制LCC(lane centering control)用于实现车辆的横向控制。控制层接收策略层的决策信息,激活被选中的控制器。控制器利用V2V通信和自车传感器获取的数据计算用于车辆的节气门开度、制动压力和转向盘转角的控制指令。这些指令信息最终由控制层输出给线控执行机构,实现对车辆的控制。
控制层中CACC、ACC等控制方法已较为成熟,本研究主要针对策略层进行设计。其中,非紧急工况下的队列车辆控制策略是本研究团队提出的队列稳定行驶控制策略。因此,本文重点设计应对队列紧急制动和他车插入队列这两种紧急工况的控制策略,以及不同工况间的控制切换策略。
2 队列紧急工况控制策略层设计
2.1 队列紧急制动控制策略
图2展示了队列紧急制动工况的一个实例:一台干扰车辆突然变道,出现在队列第2辆车前方,较小的车间距和较大的相对车速达到了触发AEB的TTC条件,导致该车进行紧急制动,其后的队列车辆也随即进行紧急制动。
类似图2的场景有很多种,队列中任何一辆车都可能因为某种突发状况进入紧急制动状态。为充分考虑可能出现的各种队列紧急制动工况,制定了如图3所示的控制策略。
图2 队列紧急制动场景示意图

图3 队列紧急制动控制策略
定义队列中第一个进入紧急制动状态的车辆为触发车辆,它会将相关信息广播出去。收到制动信号的车辆将根据自身与触发车辆的相对位置采取相应的措施。
(1)如果触发车辆位于自车后方,需要根据触发车辆前方的车辆数目来决定控制策略。
a.如果在触发车辆前方有不少于3辆车,则此时将队列自动拆分为:触发车辆前方的队列保持原状态继续行驶状态和触发车辆及其后跟随车辆进行紧急制动状态。
b.如果触发车辆前方不超过两辆车,则此时自车减速至v(比如高速公路最低限速60 km/h),等待后车。如果等待t(比如20 s)后后车仍未发出追赶信号,则将队列拆分为:前方车辆队列继续行驶并逐渐恢复原巡航车速;如果t内紧急情况解除,后车开始追赶,则自车等待后车追上,直至追赶车辆全部重新入队,随后逐渐恢复原巡航车速。
(2)如果触发车辆位于自车前方,自车将直接进入紧急制动状态。这时,车辆需要根据前车的减速度信息来确定自车的减速度,并广播自车的期望减速度和实际减速度。
2.2 他车插入队列控制策略
图4为他车插入队列场景示意图。该工况主要包括两种情形,即他车插入队列且长时间停留和他车插入队列并快速驶离。
图4 他车插入队列场景示意图
与图2不同,图4场景中非队列车辆与队列车辆之间车间距较大,且没有较大的相对速度,短时间内没有碰撞风险,不会触发队列车辆的AEB。为应对图4展示的两种可能情况,制定了如图5所示的控制策略。
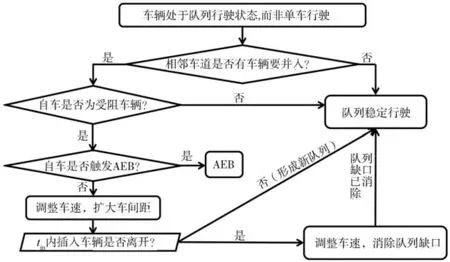
图5 其他车辆插入队列控制策略
当有其他车辆插入队列时,称插入车辆后方的第1辆队列车辆为“受阻车辆”,称插入位置为“队列缺口”。受阻车辆通过自车传感器检测插入车辆从旁边车道靠近、并入当前车道的驾驶行为,实时计算碰撞风险并将相关信息广播出去。
(1)当存在碰撞风险时,AEB被触发,转化为队列紧急制动工况。
(2)当无碰撞风险时,检测到插入车辆完全并入当前车道后,受阻车辆与其后方车辆一同减速,扩大与插入车辆的间距。
b.如果t内,插入车辆保持在当前车道,则受阻车辆及其后方车辆与前方队列分离,受阻车辆驾驶权交还给驾驶员,作为后方队列的头车继续行驶。
2.3 不同工况控制切换策略
在制定了紧急工况下的控制策略后,还需要有不同工况下的控制切换策略,才能形成完整的控制闭环。根据可能面临的紧急工况和非紧急工况,总结出队列车辆可能处于的5种状态:人工驾驶、紧急制动、入队、队列稳定行驶、受阻行驶。本研究设计了不同车辆状态之间的切换规则和条件,并制定了各状态下的车辆纵向控制器选择方案,如图6所示。
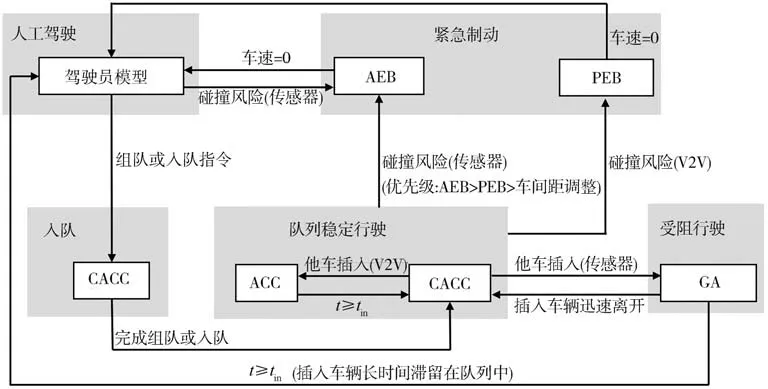
图6 控制切换策略示意图
(1)当队列在稳定行驶时,头车处于人工驾驶状态,由驾驶员控制;跟随车处于队列稳定行驶状态,采用CACC控制器。
(2)当队列遭遇队列紧急制动工况时,按以下两种情况分别控制,即
a.当自车传感器检测到碰撞风险时,就会进入紧急制动状态,切换到AEB控制器进行制动。
b.当车辆通过V2V通信得知前方有车辆进行紧急制动时,也会进入紧急制动状态,此时则采用PEB控制器。
刹停后,车辆驾驶权将交还给驾驶员。
(3)驾驶员给出组队或入队指令后,车辆转移到入队状态,采用CACC控制器。需要注意的是,入队和队列稳定行驶两种状态的CACC控制器采用两组不同的控制参数。完成组队或入队后,车辆转移到队列稳定行驶状态,采用CACC控制器。
食品添加剂的储存与使用应符合下列要求:食品添加剂应有专人采购、专人保管、专人领用、专人登记、专柜保存;食品添加剂的使用量与使用范围应符合GB2760的规定,并如实记录领用、使用情况;计量食品添加剂的电子秤等应定期做好检定,保留有效的检定证明;经营者不得采购、贮存和使用亚硝酸盐。
(4)当队列遭遇他车插入队列工况时,整个过程分为两个阶段,每个阶段包括两种情况。
第一阶段,识别插入车辆并作出调整:
a.当自车传感器检测到前方有干扰车辆进入时,会切换到受阻行驶状态,采用车间距调整控制器将车间距扩大至安全范围。
b.当车辆通过V2V得知前方有车辆插入队列时,与头车的间距信息不可知,CACC控制器不再适用,因此转而采用ACC控制器。
第二阶段,根据插入车辆的以下两种不同行为采取相应策略:
a.如果插入车辆很快离开,受阻车辆会回到队列稳定行驶状态,切换回CACC控制器,后方车辆也切换回CACC控制器。
b.如果插入车辆长时间停留,受阻车辆会变为新头车,转移到人工驾驶状态,由驾驶员接管,后方车辆则切换回CACC控制器,变为新队列的成员。
以上不同工况控制切换策略,不仅给出了处理多种不同紧急工况的策略,而且给出了紧急工况解除后使控制系统重新回到非紧急工况的方案,实现了完整的控制闭环,从而使控制系统具有连续处理不同紧急工况的能力。
3 仿真验证
为验证控制策略的有效性,搭建了PreScan/Simulink联合仿真平台。基于此车辆队列仿真平台,进行了紧急工况下的仿真验证。首先,设计了一种依次经历头车触发紧急制动、他车插入队列并快速驶离、第3辆车触发紧急制动、他车插入队列且长时间停留这4个紧急工况的复杂综合场景,并在该场景下进行仿真,验证控制系统连续处理紧急工况的能力。然后,在不同的通信时延下进行仿真,讨论通信时延对于控制效果的影响。
3.1 复杂综合场景仿真
3.1.1 仿真设计
采用PreScan提供的车辆模型,模型参数如表1所示。5台队列车辆依次称作vehicle_i(i=1~5)。毫米波雷达的参数设置如表2所示。

表1 车辆模型参数
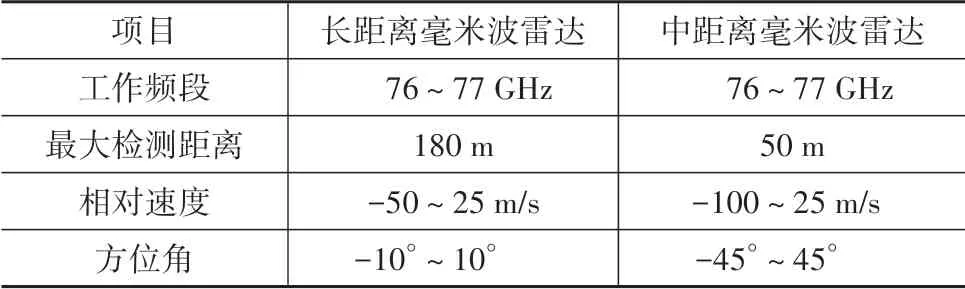
表2 毫米波雷达参数
复杂综合场景的道路模型如图7所示,由1条主干道、3条下匝道和2条上匝道组成。按照设置,队列从左下角的道路起点出发,依次经历头车触发紧急制动、他车插入队列并快速驶离、第3辆车触发紧急制动、他车插入队列且长时间停留4个紧急工况。4个紧急工况之间由非紧急工况连接,形成整个综合仿真场景。

图7 道路模型-连续紧急工况
3.1.2 仿真结果与分析
采用队列车辆速度曲线和队列车辆实际间距曲线对控制效果进行分析。连续紧急工况下的仿真结果如图8所示。
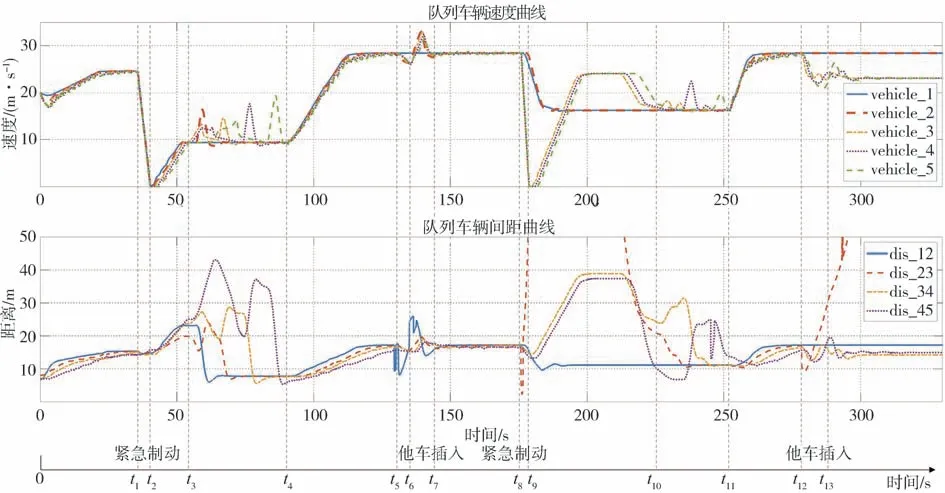
图8 队列各车辆速度曲线与车间距曲线
0~t:队列逐渐加速至25 m/s并保持匀速行驶。
t时刻(约36 s):一辆干扰车辆突然在队列头车前变道,触发头车的AEB,进而导致跟随车辆进行紧急制动。
t~t:如图9(a)所示,各车辆减速到0,车间距控制在15 m左右,相比队列稳定行驶状态变化量不超过2 m。随后,各车辆均进入人工驾驶状态,按照预设的驾驶员期望速度加速到10 m/s。
t~t:各跟随车依次组队入队。
t时刻(约130 s):一辆干扰车辆从vehicle_2前进入队列中。如图9(b)所示,vehicle_2在检测到插入的外来车辆后,适当减速拉大与插入车辆的车间距。
t~t:插入车辆驶离。如图9(b)所示,vehicle_2加速追赶前车,缩小与头车的车间距。

图9 队列各车辆速度曲线与车间距曲线(各紧急工况)
t时刻(约176 s):一辆干扰车辆从vehicle_3前迅速穿行而过。因为与vehicle_3距离很近,达到了AEB的TTC条件,导致队列中靠后的3辆车刹停。如图9(c)所示,车间距控制在14 m左右,相比队列稳定行驶状态减小量不超过4 m。而位于前方的两辆车则逐渐减速至17 m/s(约为60 km/h),等待后车追上。
t~t:后三车由驾驶员驾驶,追赶前车。
t~t:后三车依次重新入队。
t时刻(约278 s):一辆干扰车辆从vehicle_3前插入队列,如图9(d)所示,vehicle_3适当减速扩大车间距。
t时刻(约288 s):以干扰车辆为界,队列拆分,分别以两车队列、三车队列继续行驶。
当队列头车触发AEB时,后方车辆能通过V2V通信得到相关信息,整个队列能够安全制动。而且,各车辆能在驾驶员的驾驶下重新组成队列继续行驶。当队列中第3辆车触发紧急制动时,后3辆车能够安全制动,并在驾驶员驾驶下追赶正在等待的前方队列,依次重新入队。当有非队列车辆插入队列中(且未触发队列车辆AEB)时,受阻车辆能够识别出插入车辆,并拉大车间距。插入车辆短时间内离开后,队列能够恢复原车间距继续行驶。插入车辆长期停留在队列中时,队列能以插入车辆为界进行拆分,继续行驶。
在上述由非紧急工况和4种紧急工况组成的复杂综合场景中,车辆不仅可以实现各工况下安全、稳定行驶,更重要的是,实现了不同工况间的切换控制,在工况切换过程中有效保证了车辆安全,具备连续处理紧急工况的能力。
3.2 通信时延对控制效果的影响分析
在队列紧急制动的各可能情况中,头车触发队列紧急制动涉及到的制动车辆数最多,也最危险。在他车插入队列的两种可能情况中,相比于插入车辆长期停留,插入车辆快速驶离涉及到控制队列车辆消除队列缺口,对控制性能的要求更高。因此,头车触发队列紧急制动和他车插入队列并快速驶离这两种工况对通信时延的要求更加严格,本研究选取这两种工况探讨通信时延对队列紧急工况下控制效果的影响。
3.2.1 仿真设计
车辆模型和传感器的设置保持不变。在他车插入队列工况中,干扰车辆设置为在vehicle_2前插入队列。
在仿真中,采用Burr概率时延模型,该模型由本研究团队采用专用短距离通信DSRC(dedicatedshortrangecommunication)设备通过大量测试总结得出。其概率分布函数为

式中:x为时延;α、β、γ为参数。
文献[17]中指出,Burr概率时延模型的最大概率时延由参数α基本确定。在仿真中,通过调整参数α来变更时延设置,并将其近似视作最大概率时延。在仿真中,分别取参数α为10、50、100、150、200和250。同时,令β=15,γ=0.3。
3.2.2 仿真结果与分析
图10为不同时延设置下队列中前两辆车的车间距变化曲线(仅画出紧急制动时段):36s左右,队列触发紧急制动;38s左右,车辆刹停。图10中,随着时延逐渐增大,车辆刹停后的车间距逐渐变小,从α=10时的12.5m减小到了α=250时的4.5m。在头车已开始制动而后车还未收到消息时,后车依然保持原车速行驶,车间距因此减小。时延越大,车间距也就越小。

图10 不同时延下紧急制动时段的队列车辆与前车间距曲线
图11 为不同时延设置下,他车插入队列工况下的队列车间距曲线。4张图中,不同时延下,车间距均在8m以上,队列能保持安全行驶。从图11(a)可看出,前两辆车的车间距曲线基本不随时延发生变化,时延对于受阻车辆vehicle_2的影响并不大。从图11(b)~图11(d)则可看出,在队列中位置靠后的vehicle_3、vehicle_4、vehicle_5车辆会受到一定程度的影响。随着时延的增大,后3辆跟随车与前车的间距曲线在干扰车辆离开后的队列恢复过程中出现更大的波动。

图11 不同时延下他车插入时段的队列车辆与前车间距曲线
综上所述,通信时延越大,紧急工况下队列的控制效果越差;在队列紧急制动工况,随着时延逐渐增大,车辆刹停后的车间距逐渐减小;在他车插入队列工况下,时延越大,队列在间距调整过程中的车间距波动越大。
4 结论
(1)针对高速公路上队列紧急制动、他车插入队列这两种紧急工况,进行了队列车辆控制策略的设计,并制定了不同紧急工况间、紧急工况与非紧急工况间的控制切换策略。基于上述策略,利用现有的L1级、L2级自动驾驶技术和队列稳定行驶控制策略,设计了由策略层和控制层组成的智能网联车辆队列控制系统。
(2)基于PreScan和Simulink搭建了队列联合仿真平台,设计了包含4种不同紧急工况的复杂验证场景,完成了五车队列在该场景下的仿真验证。结果表明,该队列车辆控制系统能有效处理这两种紧急工况,并可实现不同工况的切换控制。与现有研究仅针对某单一工况或场景不同,该队列控制系统可实现复杂综合场景下的完整队列控制。
(3)探讨了通信时延对队列紧急工况控制效果的影响。在队列紧急制动工况下,随着时延逐渐增大,车辆刹停后的车间距逐渐变小;在他车插入队列工况下,时延越大,队列在间距调整过程中的车间距波动越大。