基于轻小型无人机全自动正摄拍照法提取平原区输电线路塔基扰动面积的研究
2022-04-06李小朴
仓 敏,吴 霜,程 曦,李小朴,孙 统, 杨 貌
(1.国网江苏省电力有限公司 经济技术研究院,江苏 南京 210008;2.中国电力工程顾问集团 华东电力设计院有限公司,上海 200001)
新阶段,在开展水土保持监测工作中,广泛推广应用高分遥感影像、无人机技术,提升了水土保持监测工作的及时性、准确性,其中生产建设项目施工扰动面积的监测是水土保持监测工作的重要组成部分,贯穿项目建设的整个过程[1-5]。
输电线路工程是一种点、线分布式工程,一般情况下具有路径长、塔基多、交通不便的特点,施工扰动主要集中在塔基区。塔基区的扰动面积常规监测方法有三种:一是采用手持GPS、皮尺等进行抽样监测,利用抽样平均值计算已开工塔基的扰动面积,但此方法受限于地形、交通,尤其是山丘区因抽样数量有限,抽样统计的算术平均值代表性不足,若要获取更为准确的塔基区扰动面积,则势必增加现场监测的工作难度。二是采用高分遥感影像(一般空间分辨率为1~2 m),虽然可解译塔基区施工扰动面积,但输电线路塔基施工扰动面积较小,一般100~10 000 m2不等,受卫星遥感影像空间分辨率的影响,塔基施工扰动范围在遥感影像上所占像元较少,无法清晰地解译塔基扰动边界导致解译精度一般,另外高分遥感影像的价格也相对较贵[6-8]。三是采用无人机摄影测量技术可获取整个输电线路的扰动面积,但输电线路由于线路较长,航测通常采用长航时、飞行速度快的固定翼或垂直起降无人机,该类型无人机体积大携带不便、现场飞行架次多、操作较为专业,且后期海量影像的数据处理及解译需要使用航测及ArcGIS等软件,该方法对硬件及软件的要求极高,另外固定翼或垂直起降无人机和配套软件的购置费昂贵[5,9-11]。为提高输电线路塔基区扰动面积监测的时效性和准确性,降低现场作业难度和专业性,减少内业数据处理对软硬件的依赖,我们根据平原区输电线路的特点,提出一种基于轻小型无人机全自动正摄拍照法提取输电线路塔基区施工扰动面积的监测方法,以期为输电线路工程水土保持监测工作顺利开展提供技术支撑。
1 实例工程
工程为某1 000 kV输电线路工程,涉及3个设区市、1个省直管市、12个县级行政区,全长2×222.601 km,铁塔数量447基,沿线地势平坦开阔,海拔较低。
2 试验方案
2.1 设备配置与航线规划
2.2.1 无人机型号
采用大疆精灵4 RTK无人机,RTK-GNSS定位精度垂直1.5 cm+1 ppm(RMS),1 ppm是指飞行器每移动1 km误差增加1 mm。水平1 cm+1 ppm(RMS),续航时间为30 min,最大图传距离5 km,抗风等级约6级,机身重量1.39 kg。
2.2.2 相机及云台角度
大疆精灵4 RTK无人机为一体式云台相机,传感器为1英寸CMOS,2 000万像素。云台俯仰-90°至+30°。
2.2.3 航高设置
无人机搭载的相机类型不同,其影像地面分辨率也会不同。作业前应根据杆塔最大高度、线路地形高差、沿线障碍物高度及影像地面分辨率等因素综合确定无人机搭载的相机类型。无人机飞行相对高度与影像地面分辨率的关系可用下式确定[12-13]:
(1)
式中:H为无人机飞行相对高度;f为搭载相机镜头焦距;GSD为影像地面分辨率;a为像元尺寸。
以大疆精灵4 RTK无人机搭载的相机为例,其像元尺寸为2.4 um,焦距为8.8 mm,根据式(1)计算不同地面分辨率对应的无人机飞行高度,见表1。试验采用的飞行高度为183 m,地面分辨率为5 cm。

表1 无人机飞行高度与影像地面分辨率关系
2.2.4 航线规划
首先,收集线路定桩坐标制作线路KML文件,每10个塔基和相应的线路路径为一组飞行任务,将全线分解成若干个飞行任务。其次,打开DJIGSpro 2.0软件,将软件中的地图优化功能打开,把分解的线路KML任务导入软件中,生成航点和航线,航点即为塔基桩心位置。最后,对每组任务下的所有航点设置飞行速度、飞行高度、云台俯仰角、航点动作等。
试验方案中所有航点参数设置如下:飞行速度设置为10~12 m/s,飞行高度设置为183 m,偏航角为0,云台俯仰角为-90°,所有航点的转弯模式为定点转弯,航点动作先为云台俯仰角-90°,后为拍照,设置返航模式为自动返航,并设置返航高度不低于飞行高度。每10个塔基为一组任务,分解后的飞行任务共计45个,飞行架次45次。每组任务飞行结束后,将拍摄的塔基正摄影像DOM按照施工桩号命名保存。
2.3 塔基实际扰动面积计算
无人机全自动航拍结束后,推算塔基区实际施工扰动面积的步骤如下:
第一步:将试验塔基DOM导入PS软件中,利用PS软件中的多边形套索工具将塔基永久占地范围提取出来,在直方图中查询提取的永久占地范围内的像元数量Sn;查询对应试验塔基施工图中的永久占地面积Sy;利用PS软件中的快速选择工具,设置图像容差80,提取塔基施工扰动范围边界,并在直方图中查询提取的塔基施工扰动范围内的像元数量Sm。
第二步:利用试验塔基实际施工扰动面积Sx与实际永久占地面积Sy比值等于对应试验塔基施工扰动范围内像元数量与永久占地范围像元数量比值的关系式,快速推算出塔基实际施工扰动面积Sx,推算公式为
(2)
(3)
式中:Sx为塔基实际施工扰动面积;Sy为塔基实际永久占地面积;Sm为塔基施工扰动范围内像元数量;Sn为塔基永久占地范围内像元数量。
第三步:利用手持GPS对试验塔基的实际施工扰动面积进行现场实测,记为S真,对比分析Sx与S真的相对误差,计算分析结果示例见表2、图1。

图1 试验塔基扰动面积与永久面积像元信息示例
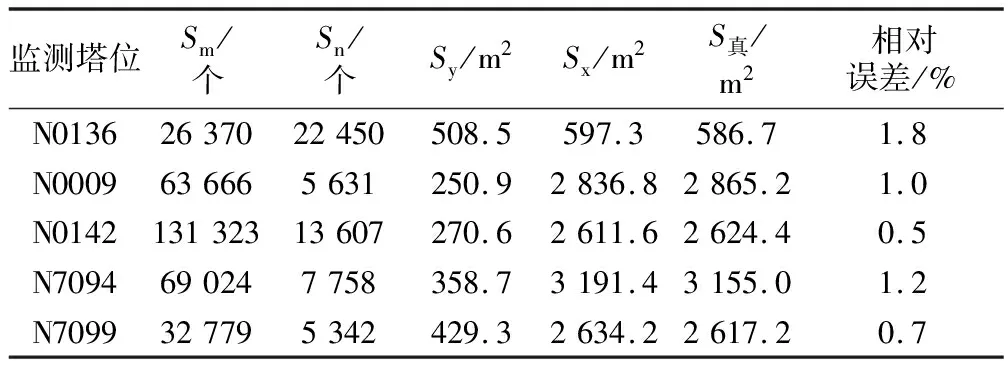
表2 塔基施工扰动面积计算结果示例
3 不同监测方法的比较
为比较手持GPS法、高分遥感影像法、无人机摄影测量法以及轻小型无人机全自动正摄拍照法监测平原区输电线路塔基扰动面积的便捷性、经济性、时效性及准确性,研究选取试验工程的50基塔分别利用4种方法进行全覆盖监测,并从工作时间、设备资料成本、监测时效性等方面对各方法进行比较分析,见表3—5。
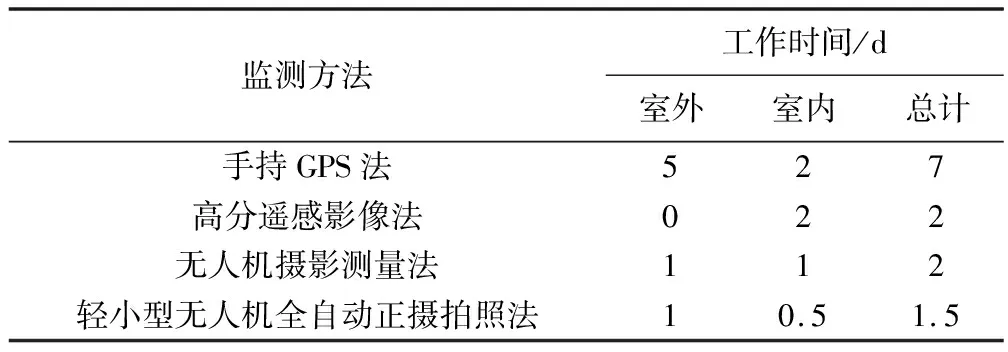
表3 不同监测方法提取塔基扰动面积的工作时间对比
结果表明:轻小型无人机全自动正摄拍照法提取平原区输电线路塔基区扰动面积的数值与实测值的相对误差在2%以内,满足水土保持监测技术规程中扰动土地面积精度不低于95%的要求,该方法可行性较高。
通过对比4种监测方法:从工作时间比较,轻小型无人机全自动正摄拍照法用时最少,手持GPS法用时最长,高分遥感影像法与无人机摄影测量法相当;从设备资料成本比较,高分遥感影像法成本最高,其次为无人机摄影测量法,而轻小型无人机全自动正摄拍照法与手持GPS法基本相当;从监测成果时效性分析,轻小型无人机全自动正摄拍照法与无人机摄影测量法因机动灵活,时效性最强,其次为手持GPS法,高分遥感影像法受限于卫星运行时间、天气以及云量等因素,时效性最差;从监测成果的相对误差分析,以手持GPS法的实测值为真值进行对比,轻小型无人机全自动正摄拍照法与无人机摄影测量法的相对误差均在2%以内,满足监测规范中扰动面积精度不低于95%的要求,而高分遥感影像法受限于卫星影像的空间分辨率,其相对误差为8.14%,不满足监测规范中的精度要求,因此高分遥感影像法并不适用于输电线路塔基区扰动面积的监测。
综上所述,通过对比4种监测方法的工作时间、设备资料成本、监测成果的时效性以及相对误差不难看出,基于轻小型无人机全自动正摄拍照法提取平原区输电线路塔基施工扰动面积的方法效果最佳。

表4 不同监测方法提取塔基扰动面积的设备资料成本对比
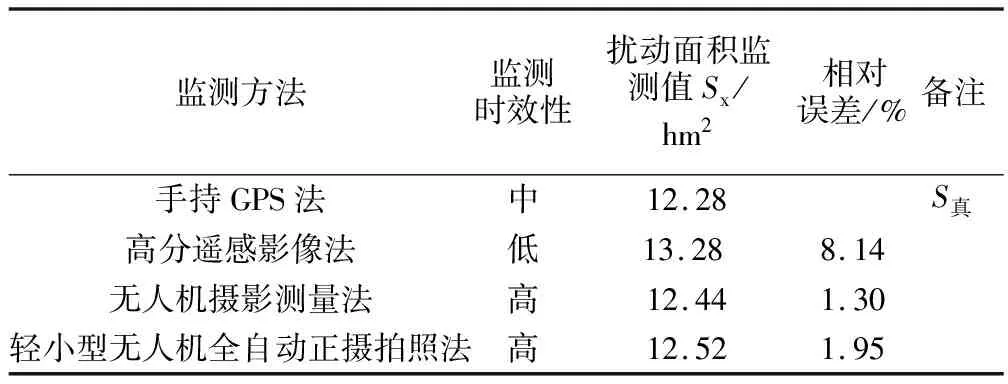
表5 不同监测方法提取塔基扰动面积的时效性及相对误差对比
4 结论与建议
轻小型无人机全自动正摄拍照法提取平原区输电线路塔基区扰动面积具有以下优势:一是解译精度高。无人机拍摄的单个塔基正摄影像地面分辨率通常在厘米级别,远高于高分遥感影像空间分辨率,可清楚地识别出塔基施工扰动边界。二是时效性好。无人机监测可根据工作需求制定现场监测频次,能进行多期线路扰动面积监测,能够动态反映工程扰动面积的变化过程。三是覆盖面广、效率高。无人机全自动正摄拍照法可快速、直观、全面地获取整个平原区输电线路塔基的扰动面积情况,大大减少了人员野外工作量和降低现场作业风险。但输电线路经过山丘区时,由于沿线高程变化较大,若采用统一航高,则获取的塔基DOM地面分辨率将不一致,对解译成果准确度影响较大。若要获取统一分辨率,则需要在山丘区线路实现变高飞行,但轻小型无人机受限于500 m的最大飞行高度以及有限的图传距离,变高全自动飞行风险较大,无法保障飞行安全,不建议采用全自动飞行模式。结合工作实践,建议山丘区线路采用人工操控无人机抽样获取线路塔基正摄影像计算塔基区的实际扰动面积。
