基于可拓理论的无人驾驶汽车内饰设计
2022-04-06王体春许枫魁
王体春,许枫魁
(南京航空航天大学 机电学院, 江苏 南京 210016)
无人驾驶汽车是一种轮式移动机器人,主要通过计算机系统的智能驾驶员来实现无人驾驶的目标,具有功能多元、便捷高效、安全稳定的特点。随着人工智能技术、5G通信技术和物联网技术的发展,人们在车内的活动轨迹将被改变,汽车内饰设计将面临新的机遇和挑战。有关汽车内饰设计的方法有很多种,近年来国内外对汽车内饰设计提出了许多新的研究成果。如郝瑞敏[1]从汽车内饰设计的构成入手,分析了汽车内饰设计中设计理念、硬件样式设计、总布置、色彩材质以及人机交互5个层次的关系和特点;刘璐[2]从事理学的角度研究了中产阶级的生活方式,探索符合中产阶级用户生活方式的未来十年的内饰设计;迟瑞丰等[3]基于场景研究来思考用户需求,并将用户体验作为设计评价的标准,为汽车内饰设计打开一条新的思考路径;黄颖捷等[4]通过对汽车内饰造型的认知模式研究,提出在创新模式下的汽车内饰认知模型,为汽车内饰设计提供了一个新的设计方法;LI H Z等[5]以感性工学的理论为基础,基于计算机辅助设计把汽车内饰设计要素的感性词汇与设计要素的图片库相映射,有助于根据客户的感性需求进行汽车内饰设计;李明等[6]提出了基于CMF理论的内饰设计思路,从色彩、材料和工艺3个方面来论述对汽车内饰设计的可行性,更加贴合使用者对汽车内饰的功能需求和心理需求。
然而,目前能对无人驾驶汽车内饰设计复杂问题进行明确量化和评价的模型体系和设计方法还不多见。可拓学已经被应用到许多的设计领域,尤其在产品设计[7-8]、建筑设计[9]、景观设计[10]以及包装设计[11]等领域,其为无人驾驶汽车内饰设计提供了方法借鉴,运用可拓学的创新方法可以有效解决无人驾驶汽车内饰设计中一些复杂的矛盾问题和无人驾驶汽车内饰设计方案难以定量分析和评价的问题。
1 内饰方案生成
1.1 问题的界定模型
(1) 界定目标。
在无人驾驶汽车内饰设计中,常见的目标为用户的需求,比如:用户要求内饰有娱乐休闲、休息睡眠等需求。无人驾驶汽车内饰设计目标的准确设定是设计出符合用户需求的内饰设计的关键。无人驾驶汽车内饰设计目标用G表示。
(2) 界定条件。
目标界定之后,就要对条件进行分析与界定,无人驾驶汽车内饰设计的条件为设计定位,比如:该内饰设计面向的用户类型、用户使用内饰的目的、内饰上市的时间等,在众多条件中,有些条件是与目标相容的,有些条件是与目标相矛盾的,对所有的条件,都必须进行明确的界定,条件用L表示。
(3) 界定问题和建立问题的可拓模型。
在设计定位下,已有的无人驾驶汽车内饰不能满足用户需求,称为矛盾问题,否则称为非矛盾问题,设问题为P,则可建立无人驾驶汽车内饰设计可拓模型:P=G∗L。
1.2 共轭分析
根据物的共轭性,产品设计Om一般都具有实部re(Om)和 虚部i m(Om) 、 软部s f(Om)和 硬部h r(Om)、潜部it(Om)和 显部a p(Om)、 负部n gc(Om)和 正部p sc(Om),并且它们可以相互影响、相互转化[12]。在进行无人驾驶汽车内饰设计分析时,必须从这四个角度入手,才能全面地了解无人驾驶汽车内饰,可以用模型表示为

(1) 无人驾驶汽车内饰的虚部和实部。
在无人驾驶汽车内饰设计中,无人驾驶汽车内饰的物质性部分是它的实部,而其非物质性部分则是它的虚部,无人汽车内饰设计要虚实结合,其实部、虚部及其相应的特征和量值如表1所示。

表1 无人驾驶汽车内饰的实部和虚部Table1 Real and imaginary parts of self-driving car interiors
(2) 无人驾驶汽车内饰的软部和硬部。
在设计无人驾驶汽车内饰时要考虑软部和硬部之间的相互作用和相互影响[13-14]。无人驾驶汽车内饰软、硬部及其相应的特征和量值如表2所示。

表2 无人驾驶汽车内饰的软部和硬部Table2 The soft and hard parts of self-driving car interiors
(3) 无人驾驶汽车内饰的潜部和显部。
无人驾驶汽车内饰里面有许多功能,包括无人驾驶汽车内饰的使用功能和辅助功能,这些功能一般在内饰设计阶段已经做了明确的要求,但是由于无人驾驶汽车内饰设计里面具有很多功能,因此无人驾驶汽车内饰可以有很多潜在的功能,在一定条件下,这些潜在的功能就会显化。无人驾驶汽车内饰潜、显部及其相应的特征和量值如表3所示。
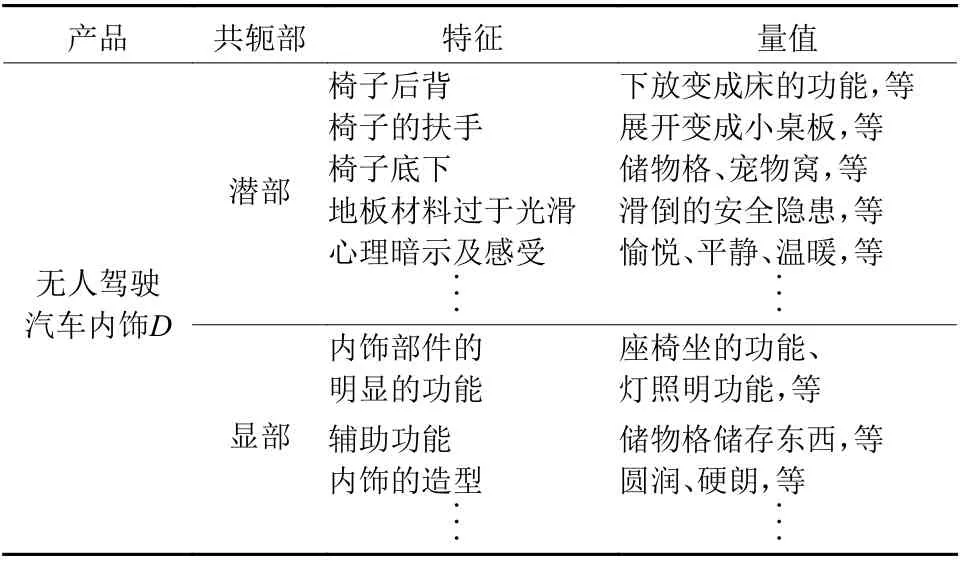
表3 无人驾驶汽车内饰的潜部和显部Table3 The submarine and display of the interior of the self-driving car
(4) 无人驾驶汽车内饰的负部和正部。
在设计无人驾驶汽车内饰时,既要考虑无人驾驶汽车内饰的正部,又要考虑无人驾驶汽车内饰的负部。无人驾驶汽车内饰具有多个特征,对用户有利的部分是正部,对用户不利的部分是负部。无人驾驶汽车内饰正、负部及其相应的特征和量值如表4所示。
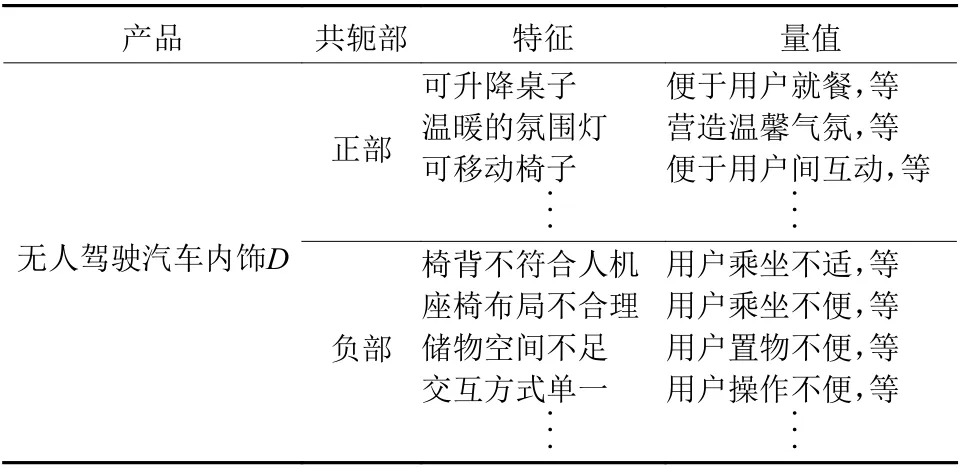
表4 无人驾驶汽车内饰的正部和负部Table4 Positive and negative parts of self-driving car interiors
1.3 发散规则和变换
(1) 发散规则。
无人驾驶汽车内饰设计的发散分析是旨在从一个用基元表示的内饰的部件或内饰的功能或内饰部件之间的关系出发,拓展出多个基元,为解决矛盾问题提供多种可选择的途径,得到无人驾驶汽车内饰设计的多种设计方案。发散规则如下。
发散规则1:由一个无人驾驶汽车内饰基元,可以拓展出多个同对象不同特征不同量值的内饰基元,即“一对象多特征多量值”,用基元表示为

式中:“ →”表示无人驾驶汽车内饰基元的发散符号。
发散规则2:由一个无人驾驶汽车内饰基元,可以拓展出多个不同对象同特征不同量值的内饰基元,即“多对象一特征多量值”,用基元表示为

发散规则3:由一个无人驾驶汽车内饰基元,可以拓展出多个同对象同特征不同量值的内饰基元,即“一对象一特征多量值”,用基元表示为

发散规则4:由一个无人驾驶汽车内饰基元,可以拓展出多个不同对象不同特征同量值的内饰基元,即“多对象多特征一量值”,用基元表示为

发散规则5:由一个无人驾驶汽车内饰基元,可以拓展出多个同对象不同特征同量值的内饰基元,即“一对象多特征一量值”,用基元表示为

在基于可拓学进行汽车内饰设计时,有时可以只用某一发散规则,有时需要综合应用若干个规则才能解决不相容问题,从而获得使用户需求得到满足的无人驾驶汽车内饰设计方案,这样的发散过程形成了一种树状结构,称为发散树。无人驾驶汽车内饰设计发散树的模型为

(2) 可拓变换。
无人驾驶汽车内饰设计的置换变换是对无人驾驶汽车内饰设计中的内饰部件或功能或部件之间的结构关系进行基元的量值或对象或特征的置换变换。
对无人驾驶汽车内饰设计中的内饰部件或功能或部件之间的结构关系的基元的量值换成另外一个量值的变换,记作

对无人驾驶汽车内饰设计中的内饰部件或功能或部件之间的结构关系的基元的对象换成另外一个对象的变换,记作

对无人驾驶汽车内饰设计中的内饰部件或功能或部件之间的结构关系的基元的特征换成另外一个特征的变换,记作

1.4 算法实现
运用可拓学进行无人驾驶汽车内饰方案设计,主要步骤如下。
Step1:从用户的需求出发,建立矛盾问题的可拓模型,确定无人驾驶汽车内饰D的功能,形成功能事元集{Af};
Step2:确定要实现这些功能事元的无人驾驶汽车内饰D的性质特征元集{(cg,vg)}和实义特征元集{(cr,vr)},性质特征元集是指要实现无人驾驶汽车内饰D的功能,该内饰应该具备的性质特征,而实义特征元集是要使无人驾驶汽车内饰D的性质特征元集实现,该内饰所要具备的实义特征元集。
Step3:由实义特征元集 { (cr,vr)},作实义物元集{(Or,cr,vr)} ,确定要设计的无人驾驶汽车D的硬部hrO和软部 s fO;
Step4:根据对无人驾驶汽车内饰设计的需求,同时考虑无人驾驶汽车内饰的潜功能要求、显功能要求和关于功能为正值、负值的部分,确定待设计的无人驾驶汽车内饰设计D的潜部 i tO、 显部 a pO、正部pscO和 负部 n gcO;
Step5:运用可拓变换获得满足用户需求的无人驾驶内饰设计方案,使无人驾驶汽车内饰设计D具有所要求的功能,同时减少内饰设计方案带来的负作用,然后判断这些无人驾驶汽车内饰设计方案是否使原矛盾问题化解,如果无法化解,则继续进行可拓变换,直到矛盾问题得以化解;
Step6:由上述过程,获得无人驾驶汽车内饰D的若干设计方案 {M}={D1,D2,···,Dn},之后进行无人驾驶汽车内饰设计方案表达;
Step7:确定无人驾驶汽车内饰设计方案评价指标和评价指标权系数,对生成的无人驾驶汽车内饰设计方案{M}进行综合优度评价,确定较优的无人驾驶汽车内饰设计方案。
2 优度评价
2.1 评价指标体系建立
本文本着系统、全面、科学、典型等原则结合现有文献并和行业内专家、设计师经过“头脑风暴”共同讨论、分析、筛选、确定出3个一级评价指标以及9个二级评价指标。具体评价指标和指标说明如表5所示。
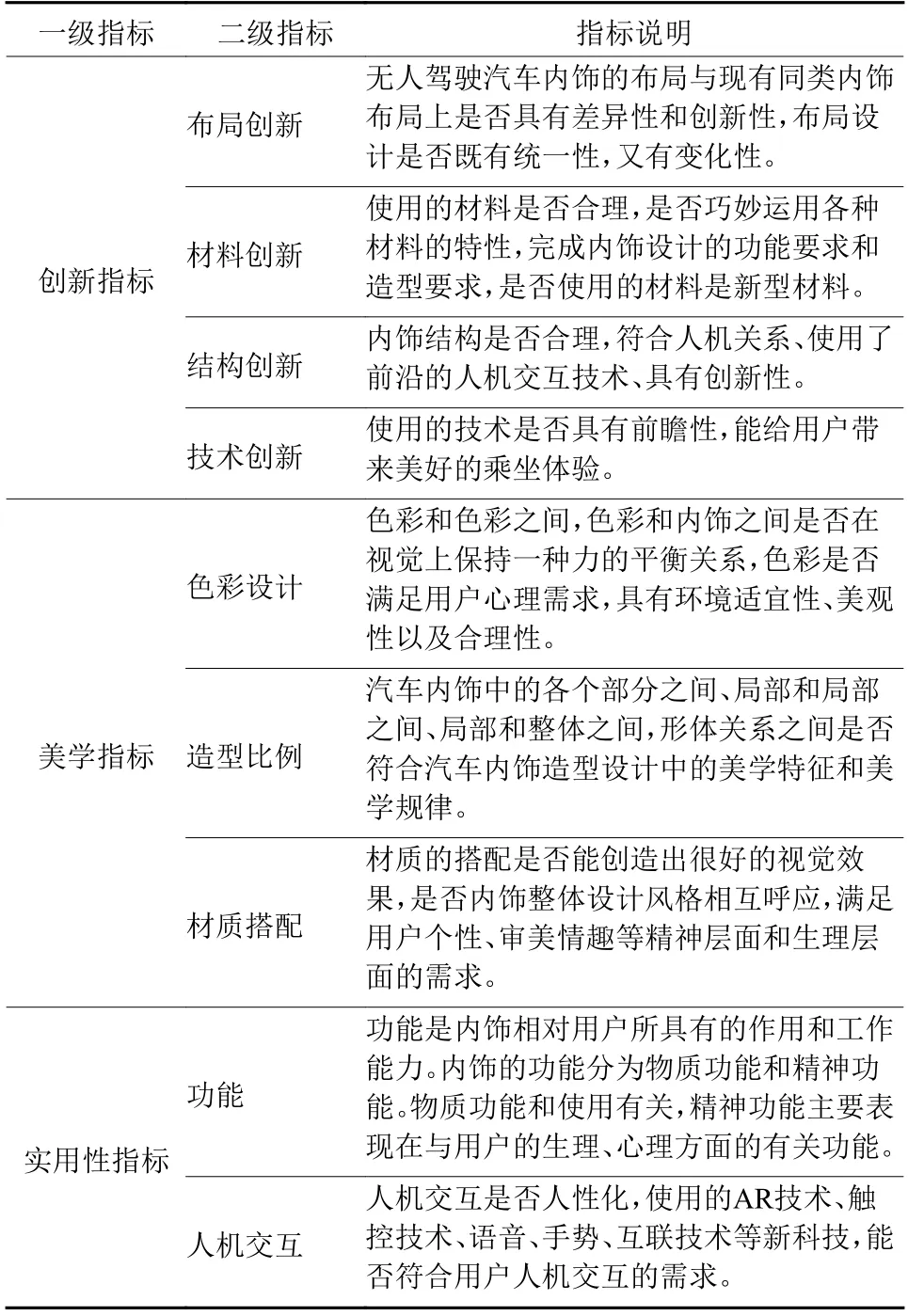
表5 评价指标和评价指标说明Table5 Evaluation index and evaluation index description
2.2 权重获取
本文采用了层次分析法对评价指标体系进行权重赋值。层次分析法可以充分体现无人驾驶汽车内饰设计评价的层次性、各指标间的关联关系以及对整体评价的影响程度。
首先根据专家打分结果加权平均后,得到判断矩阵;接着运用和积法计算各判断矩阵的最大特征值和特征向量,并对特征向量进行归一化,得到权重排序,依据各个层次的权重排序,得出权重总排序;然后对权重向量进行一致性检验;最后通过Python编程求解各评价指标权重,如表6所示。
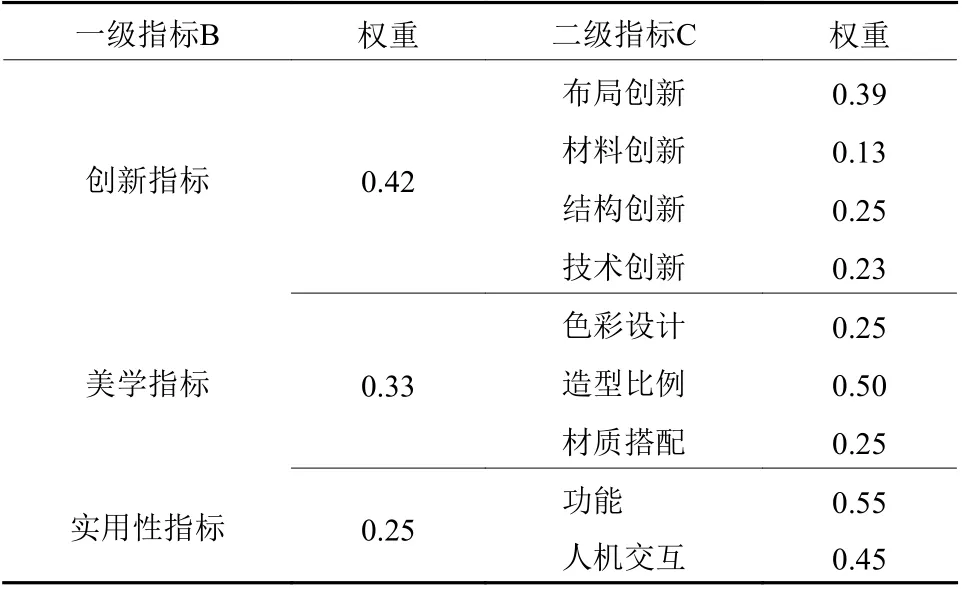
表6 层次分析法得出各评价指标权重Table6 Analytic hierarchy process to get the weight of each evaluation index
2.3 关联函数生成
关联函数能够刻画无人驾驶汽车内饰设计方案具有某种性质的程度,建立实域上的关联函数,使它能定量、客观地表述无人驾驶汽车内饰设计方案具有某种性质的程度及其量变与质变的过程。无人驾驶汽车内饰设计相关域定义如下:(1) 标准正域,也称为满意区间:X0=〈a0,b0〉表示内饰的得分在这个区间内是用户最满意的。(2) 过渡正域,也称为可接受区间:X+=X−X0=〈a,a0〉∪〈b0,b〉表示内饰得分在这个区间内是用户可以接受的。(3) 正域:X=X++X0=〈a,b〉 。(4) 过渡负域:X−=−X=〈c,a〉∪〈b,d〉。(5) 增广域:正域和负域的并区间,记作=〈c,d〉。设满意区间X0中某一点x0为最优点,建立关联函数为
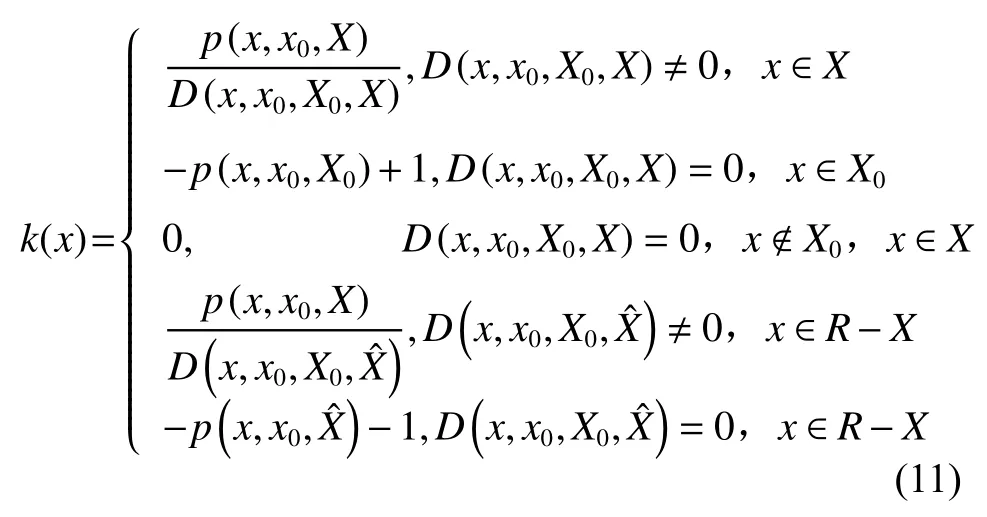
设待评价无人驾驶汽车内饰设计Zj(1,2,3,···,m) 关于某个衡量指标M Ii(i=1,2,3,···,n)的关联度,分别为ki(xj) ,则Zj关于M Ii的规范关联度为
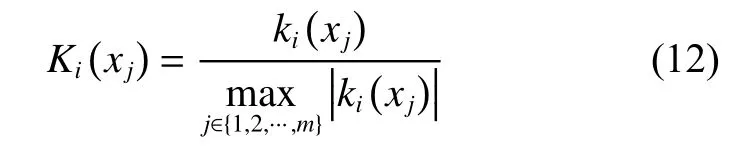
设对任一无人驾驶汽车内饰设计Zj(j=1,2,3,···,m) 衡 量 指 标 集 为M I={MI1,MI2,···,MIn},Zj关于 MIi的 规范关联度为:Ki(xj)(i=1,2,3,···,n;j=1,2,3,···,m),M Ii的 权系数为ai,则优度定义为

2.4 评价算法实现
本文使用多级优度评价方法,基于专家评判和层次分析法所得到各个评价指标的权重,对不同的设计方案进行定性定量分析,从而确定无人驾驶汽车内饰设计方案的优劣。基于可拓理论的无人驾驶汽车内饰设计优选算法步骤如图1所示。
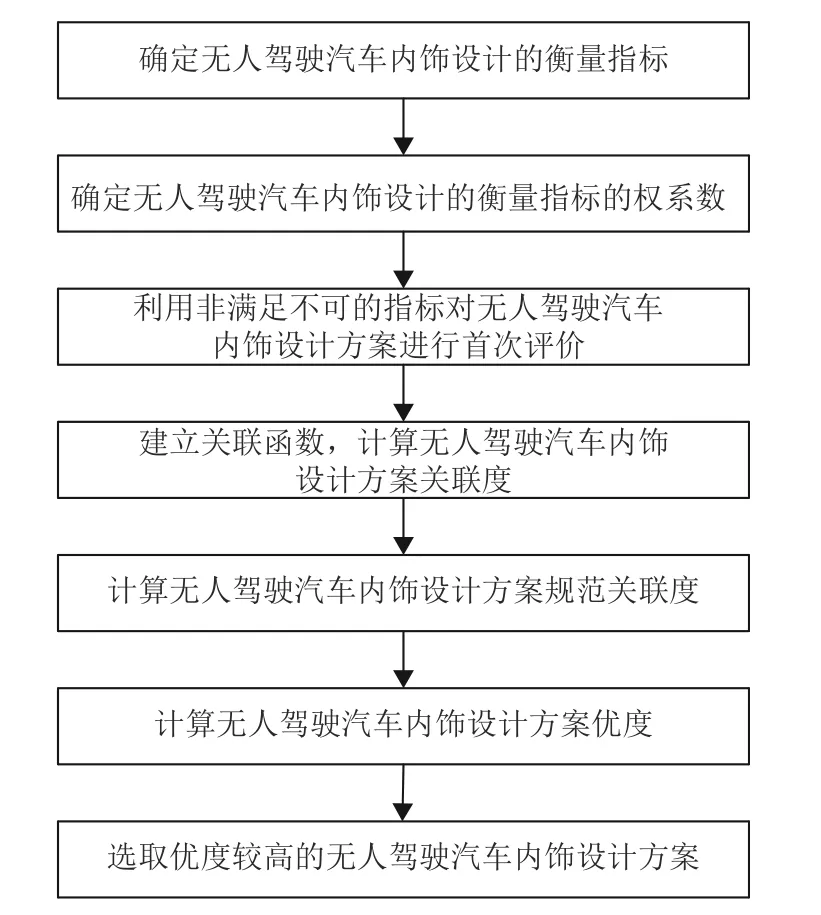
图1 基于可拓理论的无人驾驶汽车内饰设计优选算法Fig.1 Optimization algorithm for interior design of driverless cars based on extension theory
3 案例分析
针对日渐成熟的无人驾驶汽车技术,以基于2030年90后父母、孩子和宠物狗一起去近郊旅游的无人驾驶汽车内饰设计为例,通过满足一个典型家庭的无人驾驶汽车内饰设计需求,以便能满足类似家庭的内饰设计需求。
1) 问题的界定过程。
(1) 问题模型。
针对90后父母、孩子和宠物狗去近郊旅游的无人驾驶汽车内饰设计这一项目,首先找出问题(P),目标(G)和条件(L)。项目的问题是设计90后父母、孩子和宠物狗去近郊旅游的无人驾驶汽车内饰设计,核心目标是设计符合90后父母、孩子和宠物狗去近郊旅游需求的无人驾驶汽车内饰设计。
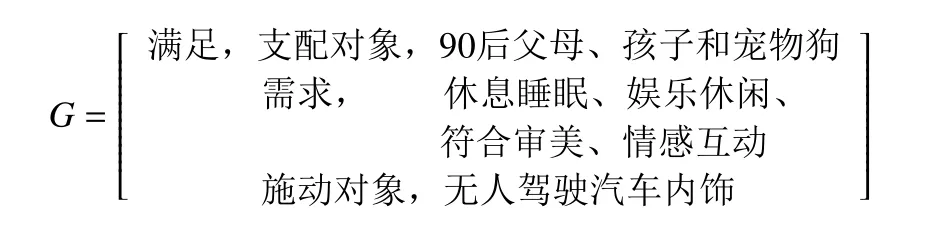
(2) 界定目标。
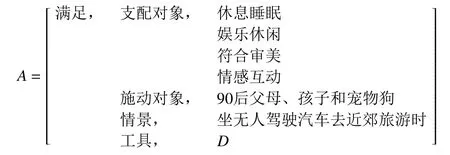
设计的无人驾驶汽车内饰应符合90后父母、孩子和宠物狗去近郊旅游的需求,根据目标用户需求定义可知,其需求应该包括休息睡眠、娱乐休闲、符合审美、情感互动,其模型用事元表示为
(3) 界定条件。
根据本文无人驾驶汽车内饰设计定位,建立无人驾驶汽车内饰设计条件物元为

(4) 建立问题的可拓模型。
由于现有的无人驾驶汽车内饰设计没有针对90后父母、孩子和宠物狗去近郊旅游的内饰设计,所以此问题是符合90后父母、孩子和宠物狗去近郊旅游的内饰需求和现有的无人驾驶汽车内饰设计构成矛盾问题,属于不相容问题,问题模型表述为P=G↑L。
2) 功能事元模型。
设待设计的无人驾驶汽车内饰为D,将上述的需求进行功能事元形式化建模为
3) 确定待设计的无人驾驶汽车内饰D的性质特征元集和实义特征元集。要实现上述功能,D必须具有如下性质特征元集:

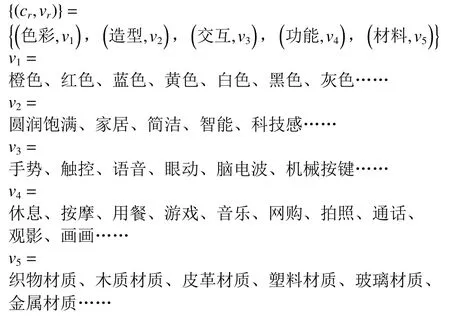
而要使上述性质特征元集实现,无人驾驶汽车内饰D必须具有如下实义特征元集:
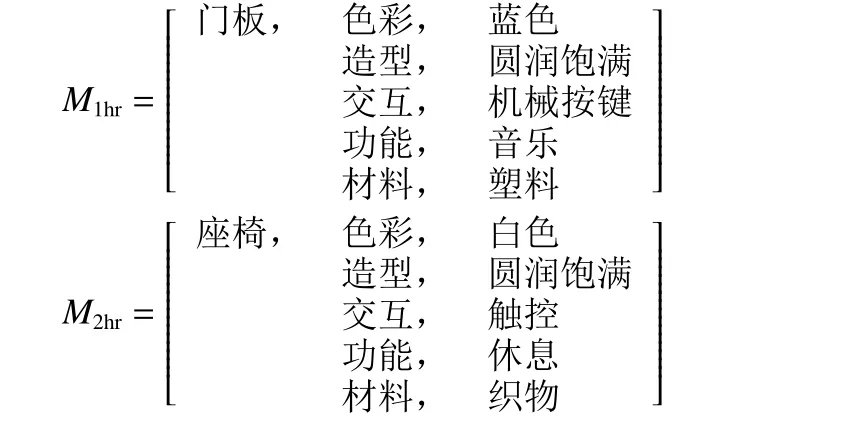
确定待设计的无人驾驶汽车内饰D的硬部和软部,构造无人驾驶汽车内饰设计的硬部物元为

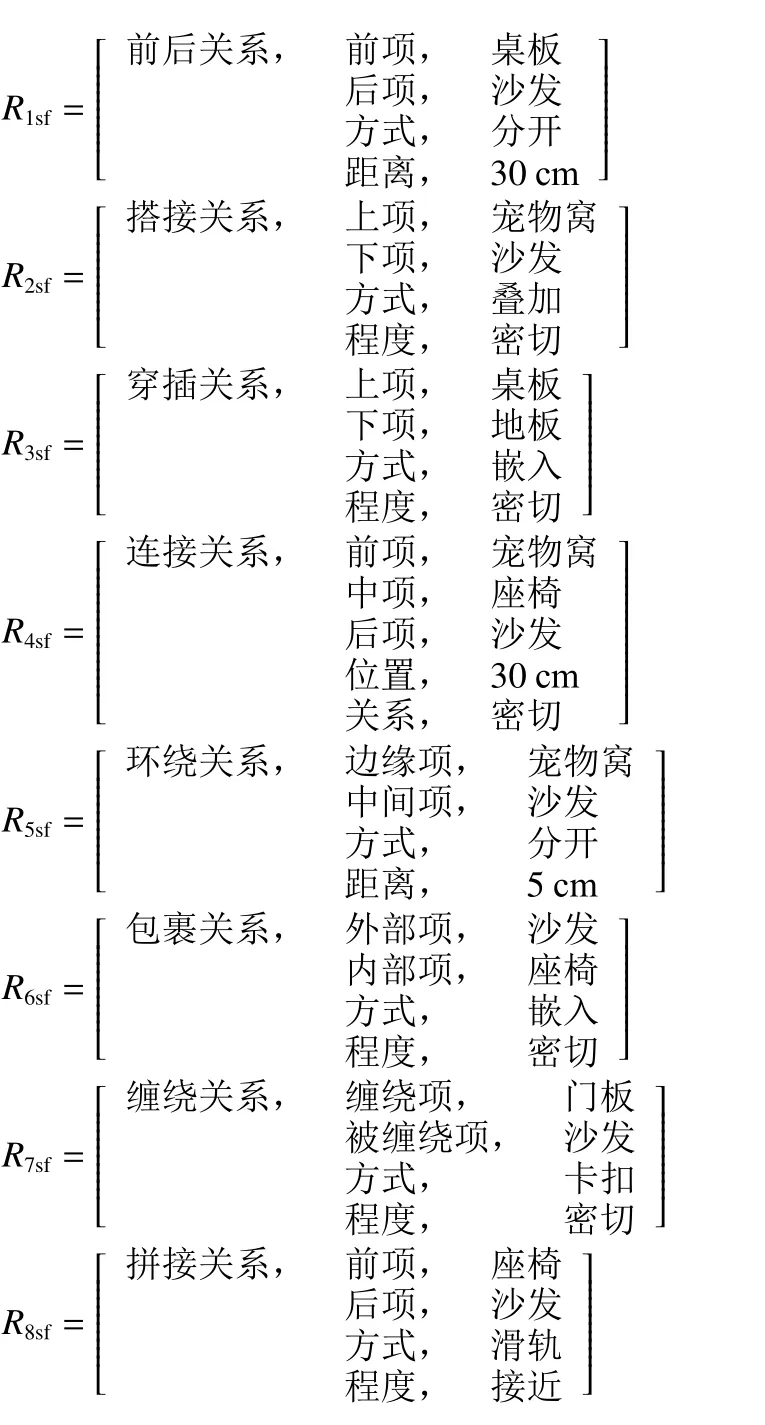
构造待设计的无人驾驶汽车内饰D的软部关系元为
4) 结合1.2小节的共轭分析,可构造待设计无人驾驶内饰D的显部、潜部、正部和负部为
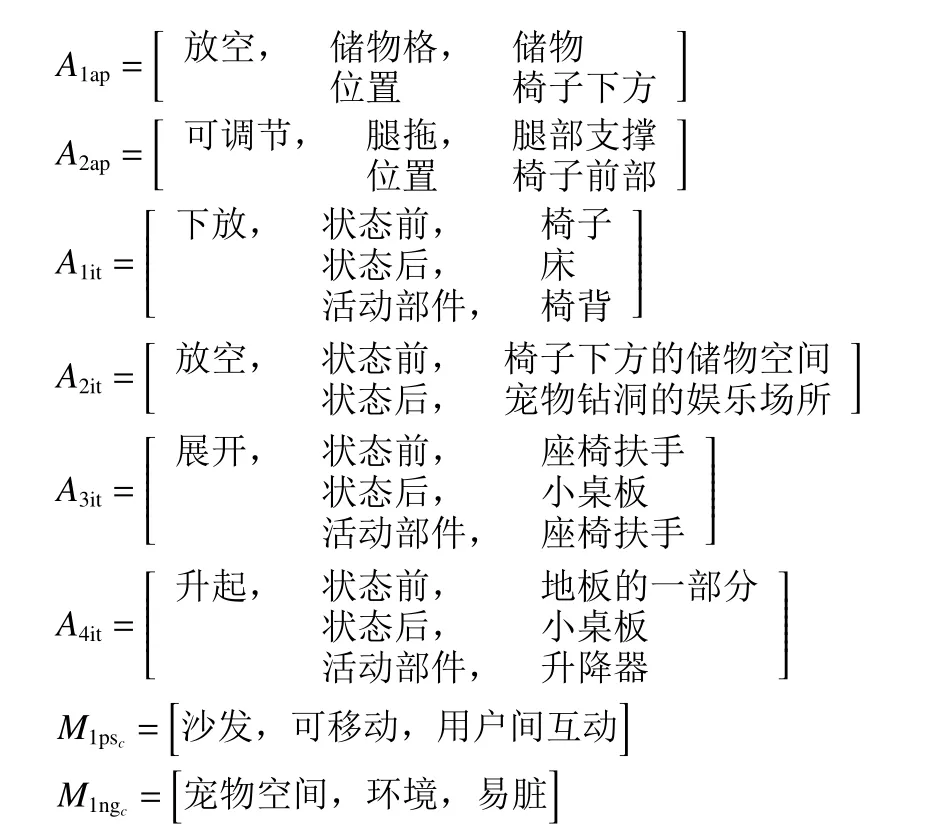
5) 基于共轭分析并利用式(2)~(7)对待设计无人驾驶汽车内饰D的软部进行发散分析。
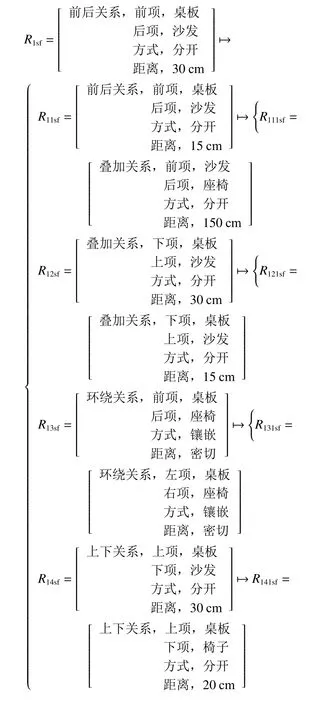
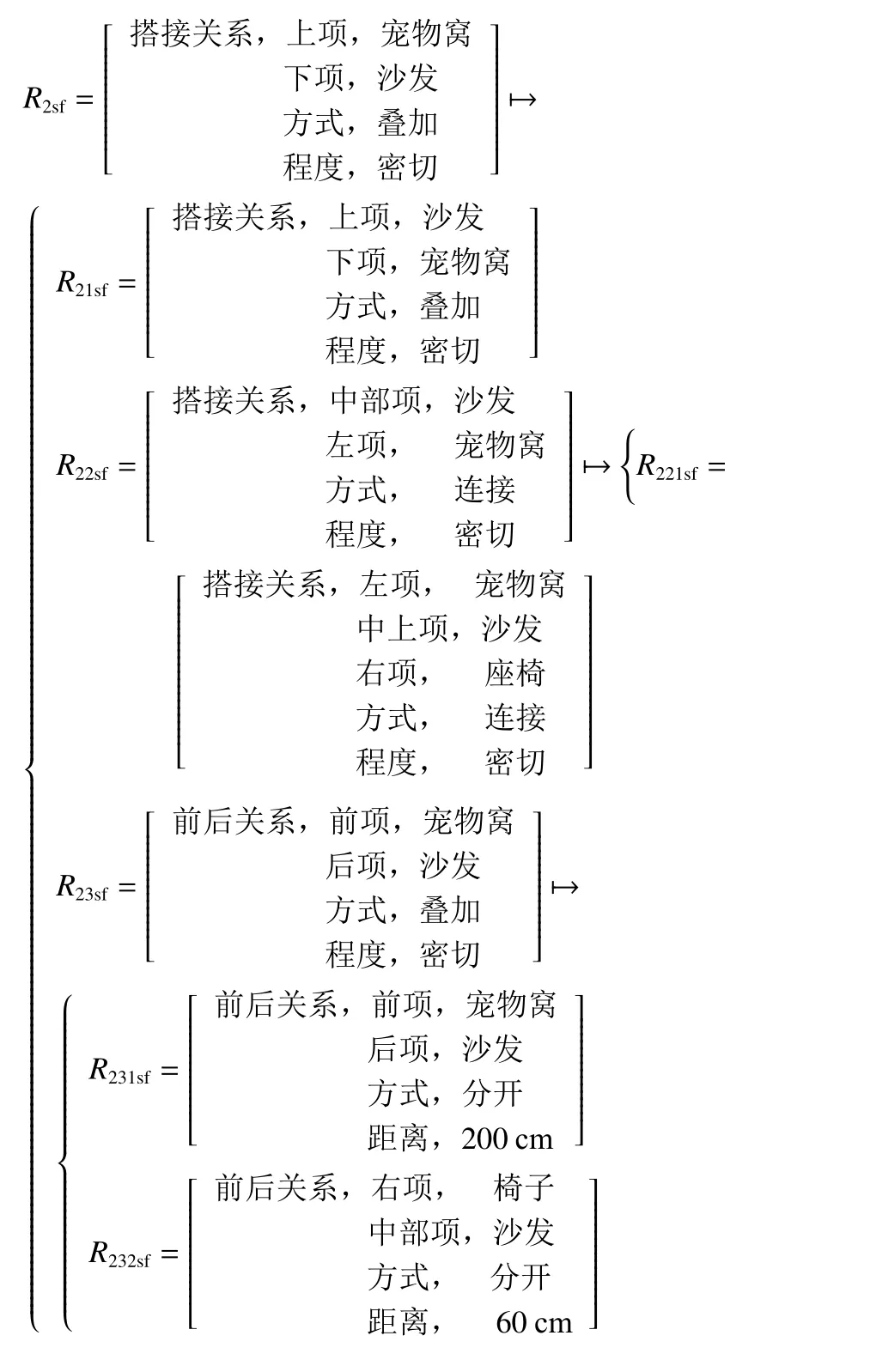
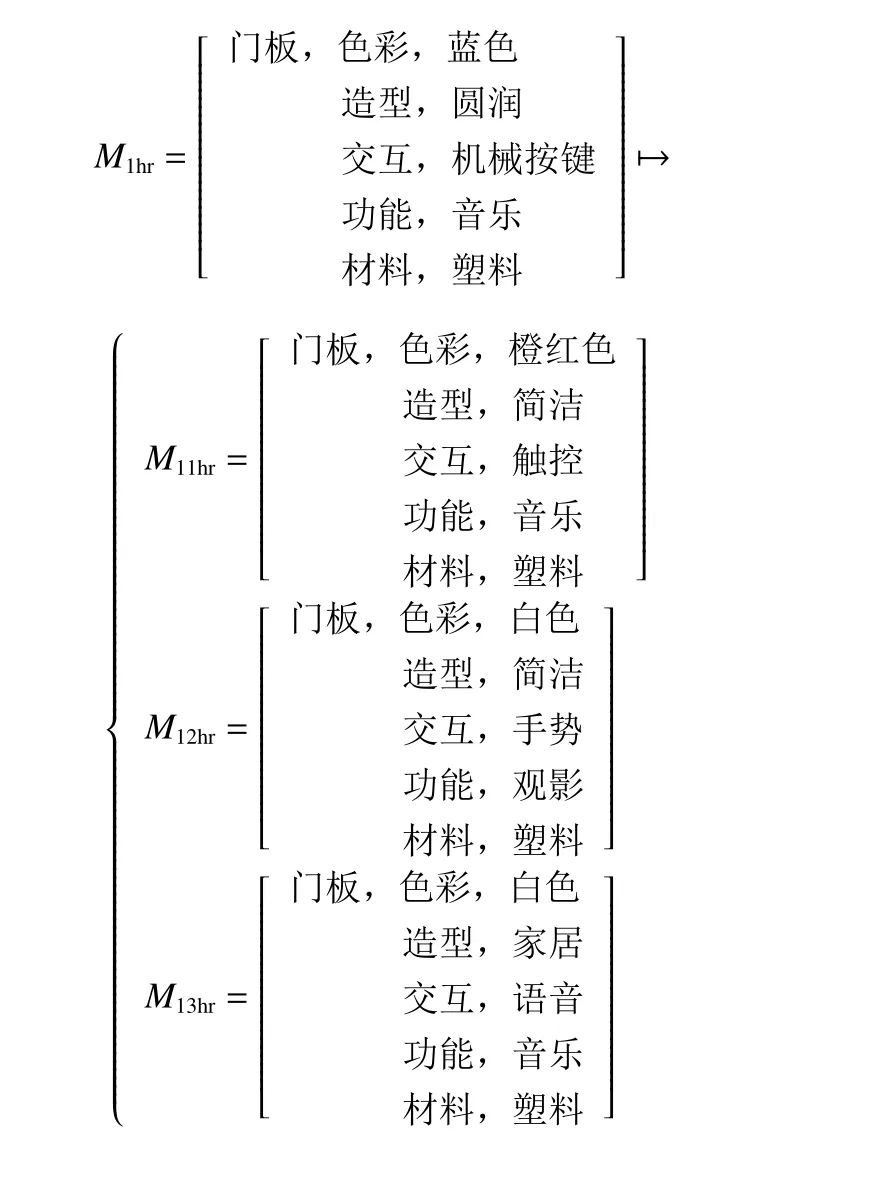
同理,对待设计的无人驾驶汽车内饰D的硬部进行发散分析如下:
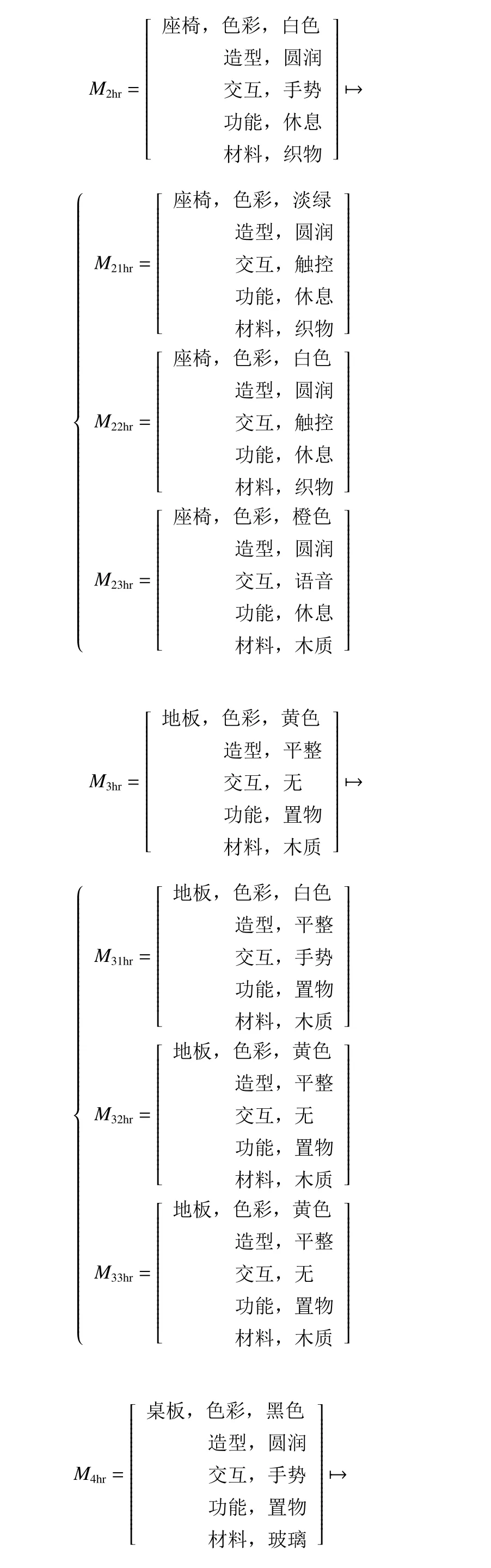
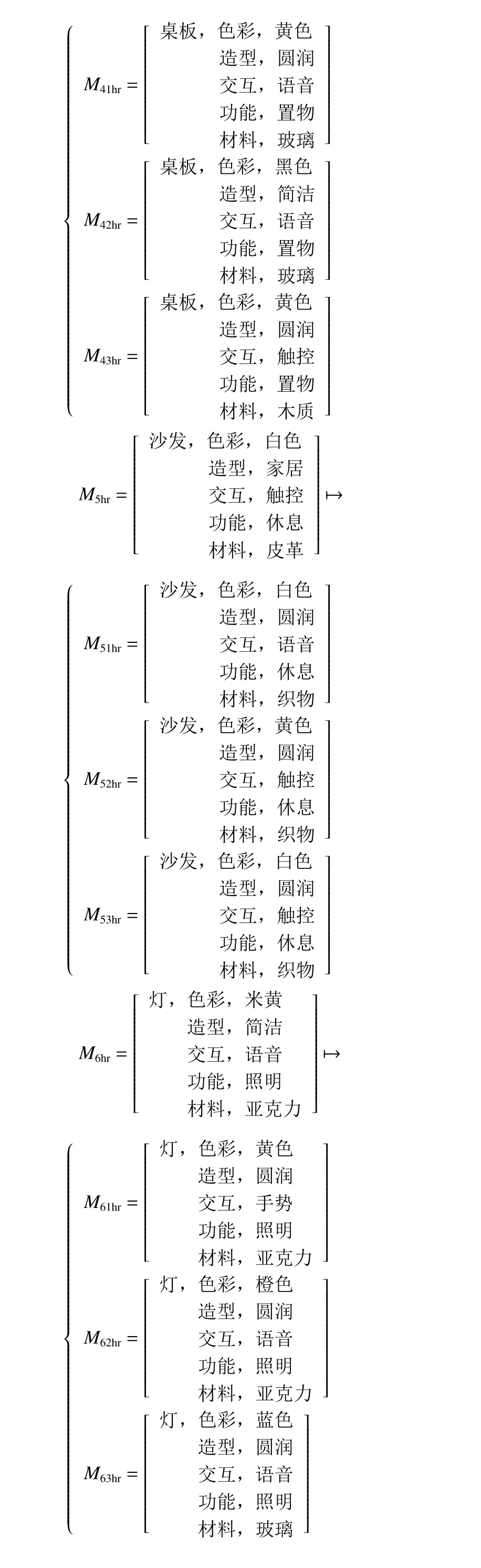
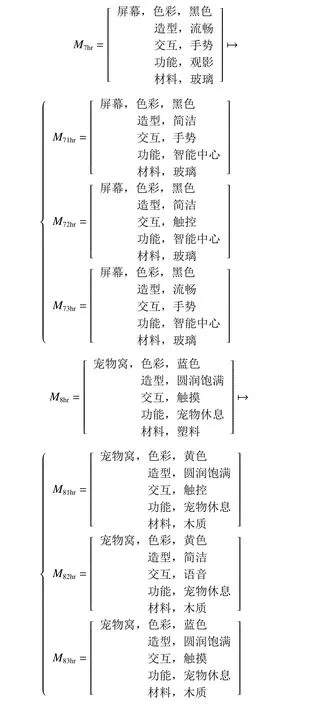
6) 运用式(8)~(10)对发散结果实施可拓变换,可以获得相应的无人驾驶汽车内饰设计创意。
(1) 对R2sf、M2hr、M3hr、M4hr、M5hr、M6hr、M7hr、M8hr进行可拓变换:
T11R2sf=R22sf,T12R2sf=R232sf,T13M1hr=M11hr,
T14M2hr=M22hr,T15M3hr=M32hr,T16M5hr=M53hr,
T17M6hr=M62hr,T18M7hr=M71hr,T19M8hr=M81hr
其中T1n,(n=1,2,···,9)表示第1个无人驾驶汽车内饰设计创意的内饰基元第n次置换变换。
进而获得无人驾驶汽车内饰设计创意模型:
D1=R1sf∧R22sf∧R232sf∧R3sf∧M11hr∧M22hr∧
M32hr∧M4hr∧M53hr∧M62hr∧M71hr∧M81hr∧
A2it∧A4it
由此可获得无人驾驶汽车内饰设计创意为:内饰的布局设计为宠物窝在左部,沙发在中上部,座椅在右部且在沙发前面60 cm位置,沙发和宠物窝是密切搭接关系,桌板在沙发前面30 cm的位置,桌板与地板的关系是镶嵌关系,可以通过升降器上升变为桌板,桌板可以通过手势的交互方式进行控制;造型简洁且材料为塑料的橙红色门板可以通过触控操作进行播放音乐;造型圆润且材料为织物的座椅可以给用户提供休息的空间,其交互方式为触控,颜色为白色;黄色的地板造型平整且材料为木质;造型圆润且为玻璃材质的黑色桌板,可用于置物;造型圆润且材料为织物的白色沙发可以给用户提供休息的空间,其交互方式为触控,沙发椅子下方的空间可以储物或可以给宠物提供钻洞的娱乐场所;造型圆润的亚克力橙色灯可用于照明,交互方式为语音;造型简洁且材料为玻璃材质的黑色屏幕是内饰的智能中心,可以通过手势来进行控制。圆润饱满的黄色木质宠物窝可以给宠物提供休息的空间,可以通过触控对宠物窝进行控制。
(2) 对R1sf、M1hr、M2hr、M3hr、M4hr、M5hr、M6hr、M7hr、M8hr进行可拓变换:
T21R1sf=R141sf,T22M1hr=M13hr,T23M2hr=M21hr,
T24M3hr=M33hr,T25M4hr=M43hr,T26M5hr=M52hr,
T27M6hr=M61hr,T28M7hr=M72hr,T29M8hr=M82hr
其中T2j,(j=1,2,···,9)表示第2个无人驾驶汽车内饰设计创意的内饰基元第j次置换变换。
进而获得无人驾驶汽车内饰设计创意模型:
D2=R141sf∧R5sf∧R8sf∧M13hr∧M21hr∧M33hr∧
M43hr∧M52hr∧M61hr∧M72hr∧M82hr∧A1ap∧
A3it∧M1psc
由此可获得的内饰设计创意为:内饰的布局设计为宠物窝在沙发两侧5 cm的位置,座椅和沙发是对立分开的状态,沙发可以通过滑轨移动和座椅进行拼接,座椅底下为储物空间,桌板在座椅上方20 cm的位置;造型为家居风格且材料为塑料的白色门板可以通过语音操作进行播放音乐;造型圆润且材料为织物的座椅可以给用户提供休息的空间,其交互方式为触控,颜色为淡绿色;黄色的地板造型平整且材料为木质;造型圆润且为木质的黄色桌板,可用于置物,其交互方式为触控;造型圆润且材料为织物的白色沙发可以给孩子提供休息的空间,其交互方式为触控;造型圆润的亚克力橙色灯可用于照明,其交互方式为手势;造型简洁且材料为玻璃材质的黑色屏幕是内饰的智能中心,可以通过触控来进行控制;简洁的黄色木质宠物窝可以给宠物提供休息的空间,可以通过语音对宠物窝进行控制。
(3) 对R1sf、R2sf、M5hr、M6hr、M7hr、M8hr进行可拓变换:
T31R1sf=R111sf,T32R1sf=R13sf,T33R2sf=R21sf,
T34M1hr=M12hr,T35M4hr=M42hr,T36M5hr=M51hr,
T37M6hr=M63hr,T38M7hr=M73hr,T39M8hr=M83hr
其中:T3i(i=1,2,···,8)表示第3个无人驾驶汽车内饰设计创意的内饰基元第i次置换变换。
进而获得无人驾驶汽车内饰设计创意模型:
D3=R111sf∧R13sf∧R21sf∧M12hr∧M2hr∧M3hr∧
M42hr∧M51hr∧M63hr∧M73hr∧M83hr∧A2ap
由此可获得内饰设计创意为:内饰布局为沙发叠加在宠物窝上方,沙发和座椅是前后对立分开距离1.5 m,座椅的前部为腿托,座椅环绕桌板且桌板镶嵌到座椅里面;造型简洁且材料为塑料的白色门板可以通过手势操作进行观影;造型圆润且材料为织物的座椅可以给用户提供休息的空间,其交互方式为手势,颜色为白色;黄色的地板造型平整且材料为木质;造型圆润且为玻璃材质的黑色桌板,可用于置物,其交互方式为语音;造型圆润且材料为织物的白色沙发可以给用户提供休息的空间,其交互方式为语音;造型圆润的亚克力蓝色灯可用于照明,其交互方式为语音;造型流畅且材料为玻璃材质的黑色屏幕是内饰的智能中心,可以通过手势来进行控制;圆润饱满的蓝色木质宠物窝可以给宠物提供休息的空间,可以通过触控对宠物窝进行控制。
综上无人驾驶汽车内饰设计创意方案集为{M}={D1,D2,D3},设计方案如图2所示。

图2 3个无人驾驶汽车内饰设计方案Fig.2 Three interior design schemes for self-driving car
7) 优度评价。
采用文中构建的评价指标体系,由用户、设计师和专家的综合打分可得到所有创新评价指标的满意区间均为(8,10),正域为(5,10),增广区间为(1,10),最优点为10。即:创新指标的最优点x1=10;满意区间X01=(a1,b1)=(8,10) ;正域为X1=(c1,d1)=(5,10);增广区间为=(e1,f1)=(1,10)。
所有美学指标的满意区间均为(7,10),正域为(5,10),增广区间为(1,10),最优点为10。即:美学评价指标的最优点x2=10; 满意区间X02=(7,10);正域为X2=(5,10) ;增广区间为=(1,10)。
所有实用性指标的满意区间均为(6,10),正域为(5,10),增广区间为(1,10),最优点为10。即:实用性指标的最优点x3=10 ;满意区间X03=(6,10);正域为X3=(5,10) ;增广区间为=(1,10)。
无人驾驶汽车内饰设计方案A、B、C各评价指标经专家打分,得分情况如表7所示。
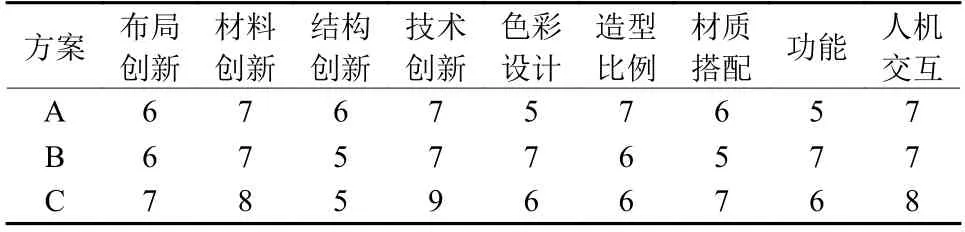
表7 内饰设计方案A、B、C各评价指标专家打分情况Table7 The scoring of the evaluation index experts of the interior design schemes A, B and C of the unmanned car
运用式(11)计算出计算无人驾驶汽车内饰设计方案A、B、C各评价指标的关联度如表8所示。运用式(12)将关联度规范化,得到无人驾驶汽车内饰设计方案A、B、C的各评价指标的规范关联度如表9所示。
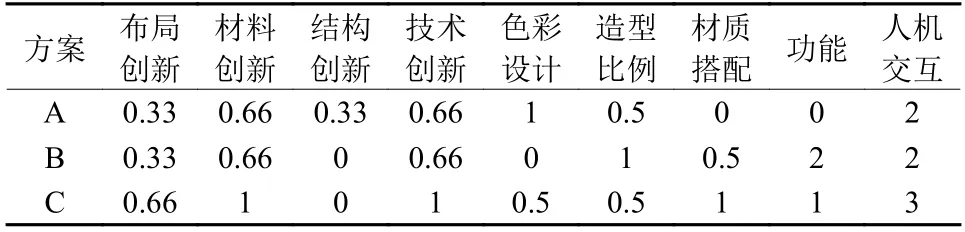
表8 内饰设计方案A、B、C各评价指标关联度Table8 Correlation degree of each evaluation index of interior design schemes A, B, C of unmanned car
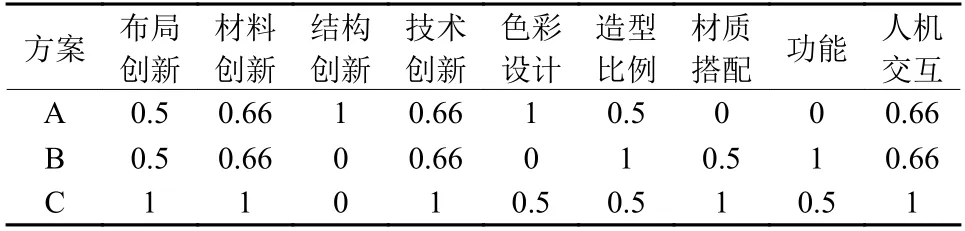
表9 内饰设计方案A、B、C各评价指标规范关联度Table9 The correlation degree of each evaluation index specification of the interior design plans A, B, C of the unmanned car
运用加权求和的方式求出无人驾驶汽车内饰设计方案A、B、C的综合优度:K(A)=0.525 942;K(B)=0.599 692;K(C)=0.661 25。
即无人驾驶汽车内饰设计方案C为无人驾驶内饰设计的最优方案。从造型比例、结构创新、布局创新、色彩设计方面对方案C进行优化,优化后的手绘效果图和建模仿真效果图如图3所示。

图3 方案C优化后手绘效果图和建模仿真效果图Fig.3 Hand-drawn renderings and modeling simulation renderings after the optimization of Scheme C
4 结论
本文将可拓学理论和无人驾驶汽车内饰的设计实践相结合,提出面向无人驾驶汽车内饰设计问题的界定方法、共轭分析以及方案生成算法。运用算法进行设计实践,得出无人驾驶汽车内饰设计创意,通过构建无人驾驶汽车内饰设计评价指标体系。并基于优度评价法进行评价分析,获得了最优的无人驾驶内饰设计方案,为后续无人驾驶汽车内饰设计提出一种新的设计思路。
