基于GADF与引入迁移学习的ResNet34对变速轴承的故障诊断
2022-04-02侯东晓穆金涛时培明
侯东晓, 穆金涛, 方 成, 时培明
(1. 东北大学秦皇岛分校 控制工程学院, 河北 秦皇岛 066004; 2. 燕山大学 电气工程学院, 河北 秦皇岛 066004)
滚动轴承是旋转机械中最常见、最重要的部件之一,其运转状态影响着机械系统的安全和生产质量.在实际工况下,设备(轧机压下系统、变频电机等)一般处于变速情况,若滚动轴承出现故障,会引起非线性振动等异常工作状态,因此,对于滚动轴承在变速情况下进行故障识别具有重要意义.
Tang等[1]将多条时频曲线(MTFC)区分为感兴趣曲线和不感兴趣曲线,再把感兴趣曲线之间的平均比率与理论故障特征系数进行匹配,以确定故障类型.Tra等[2]从非稳态信号的不同子带中提取特征,结合支持向量机、人工神经网络对轴承故障进行分类.Niu 等[3]使用Vold-Kalman阶梯跟踪滤波器准确估计旋转相位信息,并利用提取的旋转相位对振动信号进行重采样,将其解调后计算出包络阶谱,识别故障.
卷积神经网络作为被广泛使用的深度学习网络[4],在故障诊断领域也发挥了重要作用.Chen等[5]将一维振动信号作为输入,利用1D-CNN进行特征提取,结合长短时记忆(LSTM)的识别能力对提取出的特征进行故障识别,也可达到较好效果.Eren等[6]采用紧凑的自适应一维卷积神经网络对轴承进行故障诊断,有较高的实时响应能力.张立智等[7]先对振动信号经验模态分解(EMD)得到前6个本征模态分量(IMF),快速傅里叶变换(FFT)后构造时、频域空间矩阵,再对其进行奇异值分解(SVD)构造特征矩阵,输入CNN完成故障诊断.Wei 等[8]采取端到端的方法,提出一种新模型,将未去噪的时间信号作为输入,同样可以得到相当高的模型精度,即使改变工作负载,也可以保持很高的精度,并且为了理解模型的工作原理,将学习到的特征神经元部分进行了可视化处理.
考虑到卷积神经网络最广泛也最成熟的处理对象是二维图像,有学者将一维时序信号编码为二维图像[9],再进行故障分类.Hoang等[10]利用振幅大小对应不同像素值的思路,将振动信号转换为灰度图像,不同故障的振幅相差较大,结果证明方法有效.万齐杨等[11]构造小波变换下的时频图并进行去噪处理后,输入CNN完成故障诊断.Yuan等[12]首先对振动信号进行希尔伯特-黄变换(HHT)转换为时频图,再利用CNN将这些故障图分类.
本文提出的基于GADF(Gramian angular different field)与引入迁移学习的ResNet34模型的方法无需人工提取故障特征,实验结果证实,可有效实现对变速运转环境下的轴承故障类型分类.首先利用GADF编码形式将不同的一维振动信号转换成差异明显的二维图像,再将其输入引入迁移学习的ResNet34模型实现故障诊断,此处引入迁移学习可以增强模型的特征提取能力,达到更好的分类效果.为了证实本文方法的有效性,使用西储大学的轴承数据进行验证,最后对加拿大渥太华大学变速轴承进行故障分类.
1 GAF编码图像
利用卷积神经网络在处理二维图像上的优势,将振动信号转换为GADF图,方便其输入模型进行故障分类.
格拉姆角域(Gramian angular field,GAF)是一种将时序信号转换为二维图像的编码方式[9].先将振动时序信号的实测值X={x1,x2,…,xn}通过式(1)或式(2)重新编排在[-1,1]或[0,1]区间内,
(1)
或
(2)
(3)
式中:ri为半径;ti为时间戳;N是用来规范极坐标系跨度的一个常数.随着时间的增加,相应的数值在跨度圆上的不同角度点之间发生扭曲.
最后,重新编排的时间序列转换为极坐标系,考虑每个点之间的三角和或差值,利用角度透视对不同时序间隔内的相关性进行识别, GAF的定义如下:
(4)
(5)

振动信号通过GAF编码转换为两种形式:三角函数和/差及角度透视后对应编码为GASF/GADF图,如图1所示.两种编码图对比之下,GADF编码图色差丰富,细节处理较为完善,特征也更加显著,故选定GADF对时序信号进行编码转换.
2 基于迁移学习的ResNet34模型
网络结构加深,模型精度随之提升,但是在增加网络深度的同时,伴随着梯度消失或梯度爆炸,为了改善此类问题,通常使用权重初始化、批标准化(bath normalization,BN)处理以及随机梯度下降法(stochastic gradient descent,SGD)等,以上方法虽然起到一定效果,但是网络层级依旧不能大量堆叠.
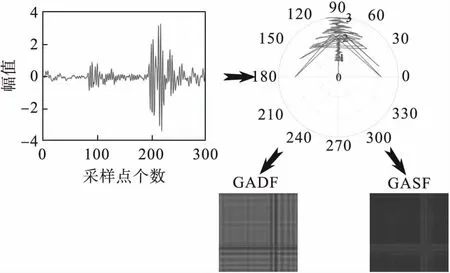
图1 GAF编码过程
2.1 残差网络(ResNet)
网络层级的加深,产生了另一个问题:层级深的网络,训练精度反而更低,即模型退化问题(degradation).He等[4]提出的ResNet引入残差结构,成功解决了这个问题,在提高模型精度的前提下,最深的网络达到了1 000层以上,常用的为ResNet18,ResNet34,ResNet50, ResNet101 ,ResNet152.综合考虑设备环境及图像训练难度,本文引用ResNet34为分类模型,基本框架如图2所示,模型参数如表1所示.
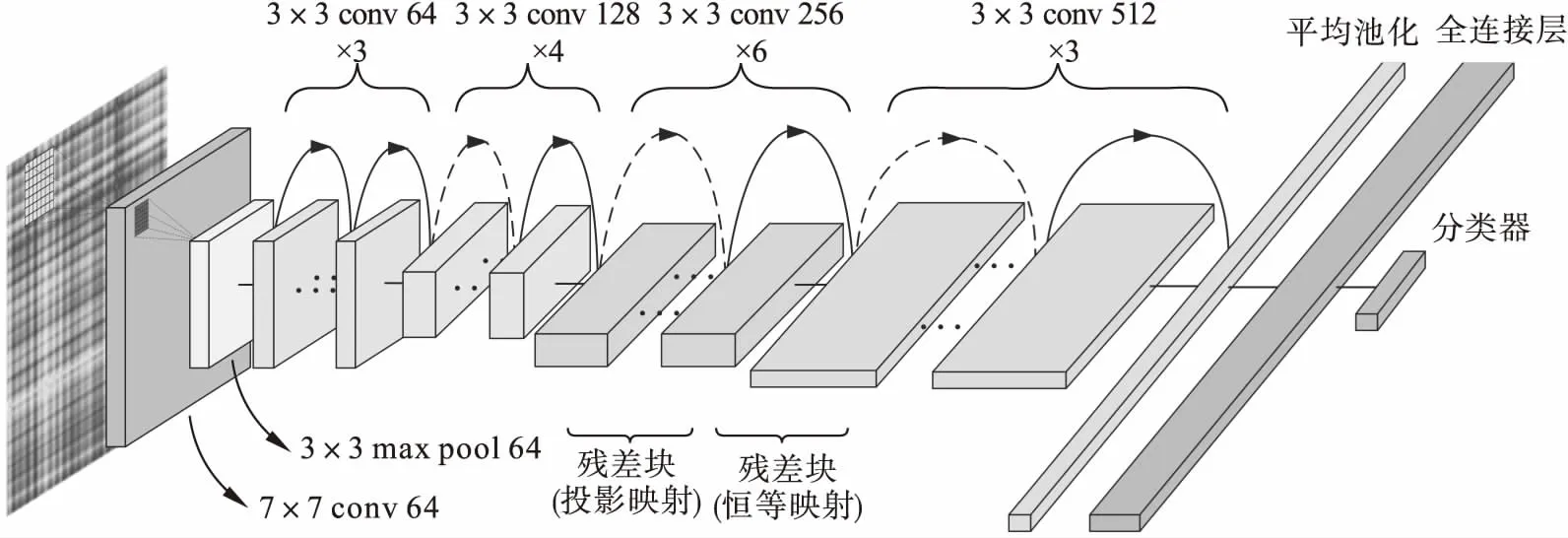
图2 ResNet34总体结构
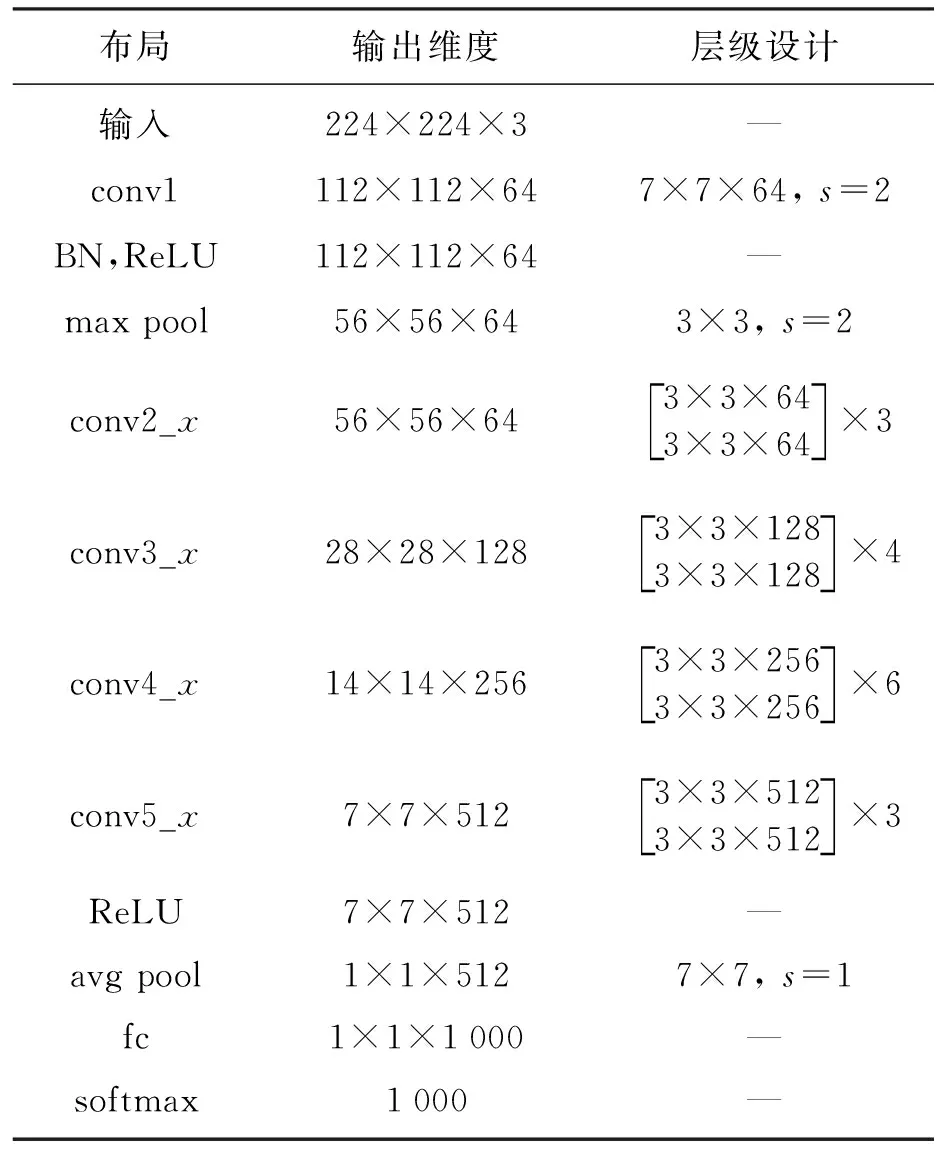
表1 ResNet34参数设置
2.2 残差结构
残差块(residual blocks)的提出,是ResNet网络的强大所在,采用快捷通道(shortcut)方式将上一层训练得到的优质权重x直接传递给下一层,通过这种方式,即使中间层F(x)训练得不好,训练误差较大,也不影响上一层的训练结果,如式(6)所示,残差输出为H(x),
H(x)=F(x)+x.
(6)
若没有快捷通道,每一层训练结果输出为F(x),就意味着若上一层训练结果误差较大,则会传递给下一层,如此反复传递,有可能陷入局部最优或者无法收敛.残差结构信息损失较少且没有给网络增加额外的参数和计算量.
残差结构处于不同位置时,考虑到输出维度匹配性,需要作出相应调整,主要结构分为两种:恒等映射(identity)和投影映射(projection).
第一种如图3所示,对应图2中实线部分,输入维度与输出维度相同时采用此结构,包括256个3×3大小卷积核的卷积层(conv)、批归一化层(batch normalization, BN)和激活函数层(ReLU).
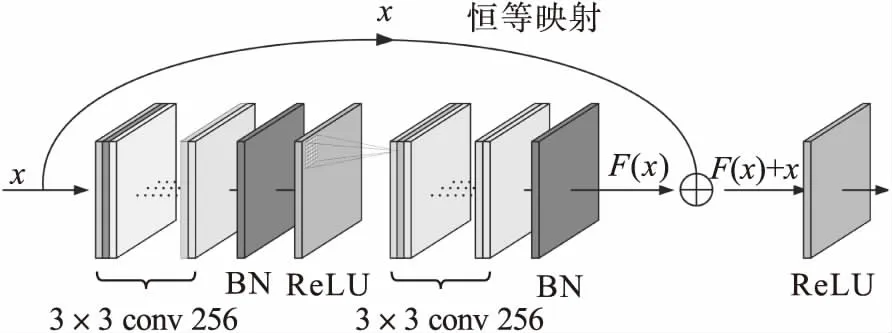
图3 恒等映射残差
第二种如图4所示,对应图2中虚线部分,输入维度为128,输出维度为256,不能进行运算,故在主线路上卷积核数量增加至256,快捷线路的卷积核大小设置为1×1,数量同样为256,这样快捷线路与主线路的输出维度即可匹配.
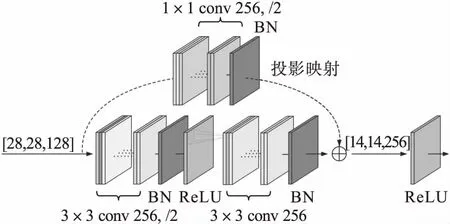
图4 投影映射残差
2.3 构建引入迁移学习的ResNet34模型
由于故障诊断中的标注样本量较少,与ImageNet中1 000万的数据样本量相差很多,所以想要训练深层网络模型较困难.想达到较好的训练效果,一个重要的前提就是要有足够多的数据支撑.为了解决这个问题,可使用迁移学习的方法(见图5).由于训练模型参数具备较强的特征迁移能力,对其他数据集进行特征提取时可直接引入,提升网络模型开发效率的同时,还可以强化模型性能,并加速训练过程.引入在大型数据集ImageNet上训练好的模型作为特征提取器,这种模型已经具备提炼抽象特征的能力,可更好地挖掘深层次图像特征,对于样本量较少的数据集依旧可以表现良好.本文采用微调的迁移策略,在训练过程中仅改变softmax层,其他层在训练过程中载入ResNet34在ImageNet数据集已经训练好的权重参数,并从起始训练,将本模型简称为T-ResNet34,以方便后续描述引用.
3 验证模型的有效性
3.1 实验数据
采用西储大学(CWRU)轴承数据[13]验证所提方法可用于滚动轴承故障诊断.以驱动端6205-2RS JEM SKF深沟球轴承为例,对外圈的3,6,12点钟方向、滚动体及内圈布置单点损伤,损伤直径为0.177 8,0.355 6和0.533 4 mm,电机负载分为0,0.75,1.5,2.2 kW四种情况,本文选用0 kW的情况,在驱动端的轴承座上方放置一个加速度传感器,采集振动信号,采样频率为12 kHz,其中外圈选用故障位置为6点钟方向,共9种故障状态,1种健康状态,对这10种状态的轴承制作相应的数据样本.

图5 迁移学习
3.2 制作数据样本
对振动信号取前十万个数据点,滑动窗口大小对应300个数据点[14],生成一个256×256的GADF编码图样本,滑动步长设置为249,每类健康状态构造390份样本,按照9∶1比例划分训练集和验证集,样本集如表2所示.为了更清晰地表征不同故障,将每类故障典型的编码图提取出来如图6所示.
经GADF编码转换生成的二维图像,不同故障类别的振动信号生成的编码图特征区别明显,纹理表征清晰,有利于故障分类.
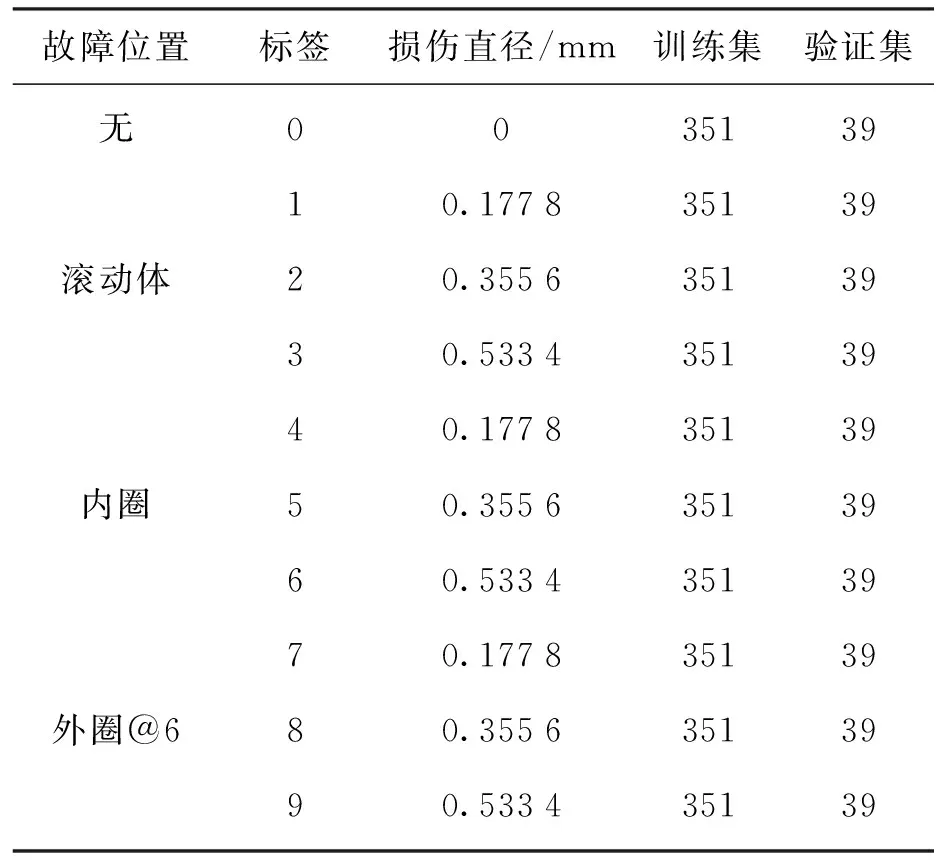
表2 数据样本
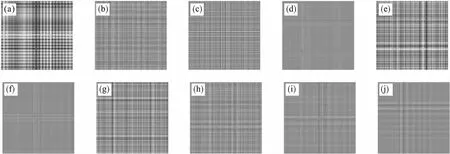
图6 各种健康状态GADF编码图
3.3 实验结果与分析
迭代次数设为120,由图7可知,T-ResNet34从一开始就达到了较高的准确率,训练过程相较于其他两种波动更小,较为稳定,模型准确率达到了98.5%,未改进处理的ResNet34为96.9%,而引入注意力机制SE模块的SE-ResNet34虽然也达到了98.7%,但是训练损失相对T-ResNet34较高,说明提取特征能力并不如本模型.
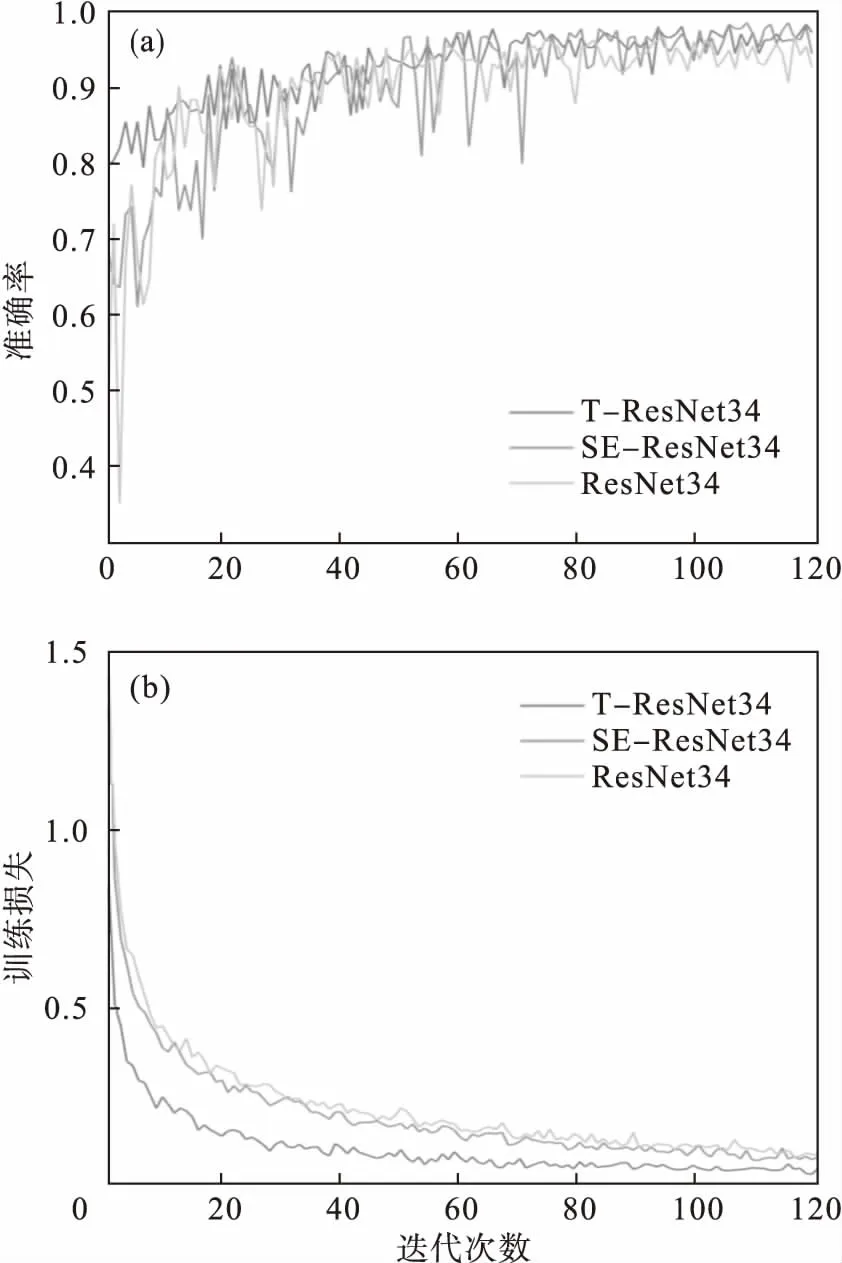
图7 验证准确率及训练损失曲线
坐标系数值0 ~ 9分别对应图6中的10种故障类型,对角线上的值代表真实值与预测值重合,即分类、预测的准确程度,颜色越深,表明预测精度越高.由图8可知,每类验证集样本量为39,对于第4类故障,有4个样本预测出现偏差,第7类和第9类故障分别有1个样本偏差,主要由于个别样本图与其他类别较为相似,导致预测时出现误判,其他7种类别的分类、预测精度均达到100%准确.
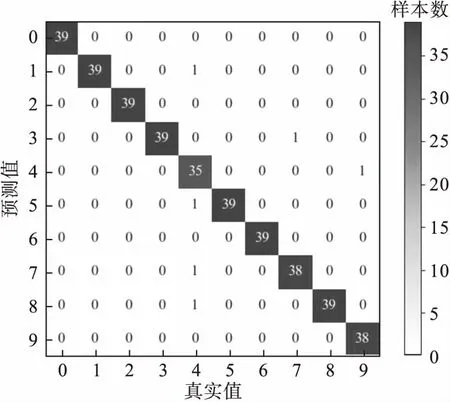
图8 混淆矩阵
3.4 不同诊断方法对比
为了验证本文方法的有效性,在同样数据集的前提下,与以下几种方法进行对比:文献[5]直接将一维振动信号作为输入,结合1D-CNN与长短时记忆网络(LSTM)实行故障诊断.文献[6]将1D-CNN与多层感知机(MLP)结合,构造一个自适应的故障诊断系统,以实现快速响应.文献[12]首先对振动信号进行希尔伯特-黄变换(HHT)构造时频图,再输入2D-CNN进行故障分类.几种方法准确率的对比结果如图9所示,可以看出,本文所提方法的准确率最高达到98.5%.
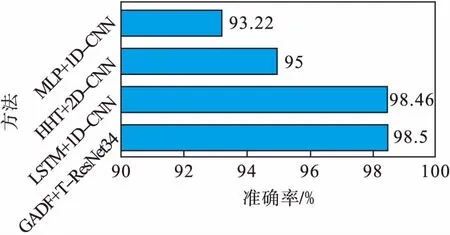
图9 整体方法对比
4 变速轴承故障诊断
滚动轴承在变速情况下出现故障时,传统的人工特征提取较为困难,需要考虑的因素及预处理较多,过程也相对繁琐,本文采用的GADF转换二维图像与T-ResNet34方法无需人工提取特征,编码图表征出的差异足够明显.
4.1 变速轴承实验数据
采用加拿大渥太华大学的变速轴承数据[15]进行故障诊断.由电机驱动轴、交流驱动装置控制转速,2个ER16K滚珠轴承安装在轴的两边,分别为健康轴承和实验轴承,采集振动信号的ICP加速度计放置在实验轴承的外壳上,采样频率为200 kHz,增量编码器(EPC 775型)用于测量轴的旋转速度.
此实验过程针对12种不同运转状况,轴承健康状态包括:正常、内圈故障、外圈故障,各包含4种工作转速变化条件:频率增加(从14.1 Hz到23.8 Hz)、频率降低(从28.9 Hz到13.7 Hz)、频率先增加后降低(先从14.7 Hz增速到25.3 Hz,然后减速到21.0 Hz),以及频率先降低后增加(先从24.2 Hz减速到14.8 Hz,然后增速到20.6 Hz).
4.2 制作变速轴承数据样本
由于本数据集实验采集信号过程中的采样频率远大于西储轴承数据,经对比分析,生成编码图的数据点也应该相应增加.
设置2 000个数据点生成一张256×256大小的GADF编码图,此时的图像特征表现比较明显,适合作为滑动窗口的宽度.同时,为了保证产生的故障图不受信号叠加等因素影响,采取不重叠方式构造样本,滑动步长设置为2 000.每种故障类别生成400个样本,按照9∶1比例划分训练集与验证集,共分为四大类,如表3所示.

表3 变速轴承数据样本
4.3 变速轴承实验结果与分析
总共四大类变速工况,每种类别包含3种健康状态,分别对这四大类进行故障分类诊断.将轴承振动信号经GADF编码转换后生成的编码图输入T-ResNet34模型,得到最终分类结果.
由表4可知,本文提出的方法在训练后均达到较高的准确率,并且损失值也较低,说明本模型对于变速工况下泛化能力较好.
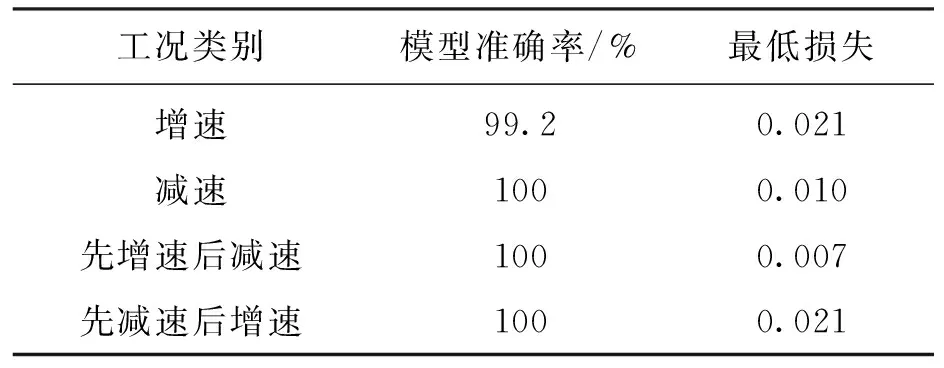
表4 模型最终训练结果
由图10可知,验证集的样本量为40,只有在速度增加时,对于健康轴承的预测出现误判,主要由于个别数据段振动情况与内圈故障类似,将其中一个样本预测为内圈故障;其余变速情况下的故障诊断均达到100%准确,说明所提方法在变速情况下仍可达到较好效果.
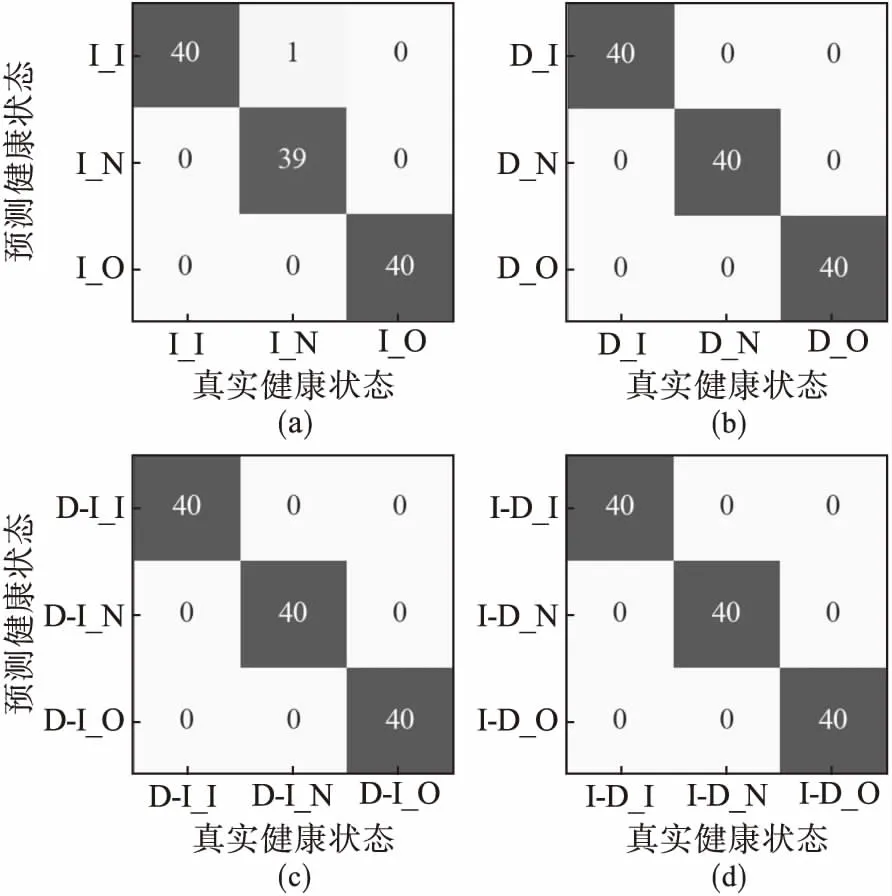
图10 四种变速工况下的混淆矩阵
5 结 论
1) 经实验验证,样本量较少时,可采用迁移学习的方式提升模型性能,将其与原模型 ResNet34和引入注意力机制SE模块的SE-ResNet34作对比,虽然两种改进的方法都起到一定效果,但是通过综合考量训练过程的验证准确率变化的稳定性与训练损失,引入迁移学习的模型T-ResNet34在特征提取能力方面表现更好.
2) 本文采用的方法:将一维振动信号转换成GADF编码图,输入T-ResNet34模型进行故障诊断,可以对轴承故障有效分类识别,在西储轴承数据上达到了98.5%的准确率.
3) 不需要考虑由于转速变化造成的复杂因素,数据预处理简单,本文的方法适用于变速工况下滚动轴承的故障诊断,用加拿大渥太华大学轴承数据集验证,结果表明,增速情况下的模型准确率为99.2%,其余三种情况均100%准确.
