基于模糊动态输出反馈的重载运输车舒适性研究
2022-04-02孙建民赵国浩姚德臣
孙建民,刘 祥,赵国浩,姚德臣
(1.北京建筑大学 机电与车辆工程学院,北京 100044;2.城市轨道交通车辆服役性能保障北京市重点实验室,北京 100044)
目前,油气悬架普遍被应用于重载运输车辆。驾驶员在驾驶此类车辆过程中,在路况恶劣和长时间驾驶的情况下易疲劳,从而导致安全事故。由于油气悬架会对车辆行驶平顺性和驾驶舒适性产生较大影响,因此针对油气悬架控制方法的研究是非常必要的。谢伟东等[1]设计了一种倾斜布置的电控悬架,并结合滑块连杆机构组成一种新型电控悬架,提升车辆行驶平顺性。李伟平等[2]提出了应用微分几何线性化理论,实现控制系统的精确线性化,从而达到在保证原有系统模型准确性的同时,对其使用线性控制方法的目的。Sim等[3]基于半主动油气悬架设计了可用于整车的LQG控制器,并进行了仿真实验,仿真结果表明应用了LQG控制器的车辆行驶平顺性得到了很大程度的提高。Savas等[4]针对油气悬架系统,提出了一种自适应反推控制方法,该方法可以使车身垂直加速度大幅减小,进而提高车辆行驶的平顺性。Naeem等[5]提出了一种采用粒子群优化算法计算PID控制器的最优系数,实验结果表明该算法使系统的最大振幅和稳定时间都比未控制的系统有所降低。调研发现:目前,大多数以提高车辆行驶平顺性和驾驶舒适性为目标的研究,均是以降低车身垂向加速度作为提升驾驶员驾驶舒适性的依据,但车身垂向加速度这一指标的降低并不能充分说明车辆的行驶平顺性和驾驶舒适性得到提升,这二者的提升不可忽略驾驶员的主观感受。
基于此,笔者以重载运输车辆为研究对象,首先,建立半主动油气悬架以及人-椅集中质量模型;然后,结合PID控制理论和模糊控制理论,设计油气悬架阻尼力控制器;最后,基于在保证经济性的前提下提升车辆的行驶平顺性和驾驶舒适性的目的,选取车身的垂直加速度、车轮动载荷、悬架动挠度和驾驶员烦恼率作为评价指标[6]进行仿真研究,并对仿真结果进行分析。
1 重载运输车油气悬架及人-椅集中质量模型
1.1 油气悬架系统动力学模型
选用1/4半主动油气悬架模型进行仿真实验。模型如图1所示。图1中:m1为簧下质量;m2为簧上质量;k1为弹性轮胎刚度;k2为油气悬架弹簧刚度;x0为路面激励信号;x1为簧下位移;x2为簧上位移;c0为油气悬架阻尼系数;fk为油气悬架可调阻尼力;a为限位块位置。
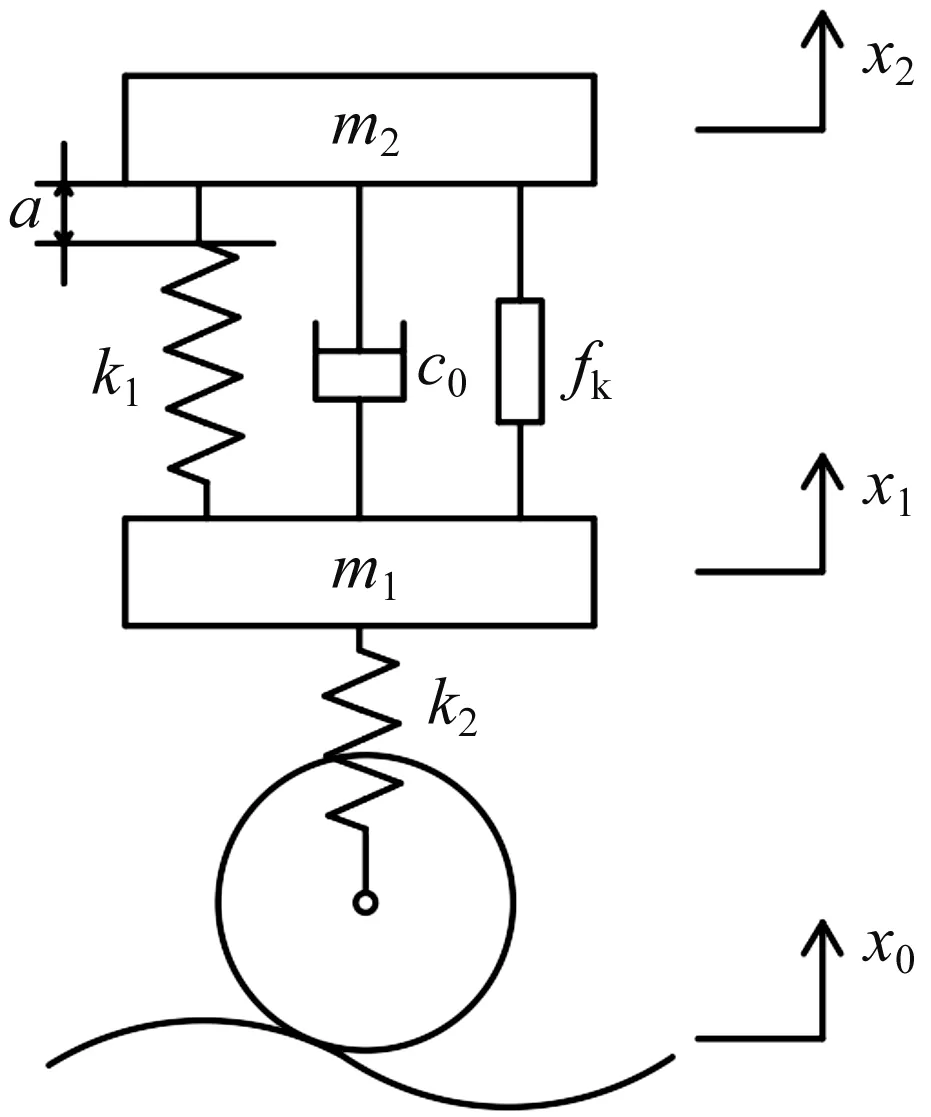
图1 重载运输车油气悬架力学模型Fig.1 Mathematical model of semi active oil and gas suspension
基于1/4半主动油气悬架数学模型和汽车动力学相关理论知识,可得1/4半主动油气悬架动力学方程为

(1)
(2)
1.2 人-椅集中质量模型
为获得驾驶员的主观感受,在油气悬架模型的基础上建立人-椅集中质量模型(人-椅模型),并据此分析驾驶员对振动的主观感受,评价车辆驾驶舒适性。但大多数人-椅模型的研究仅考虑了通过座椅传递给人体臀部的振动,忽略了从驾驶室地板传递给人的振动。因此在建模过程中,座椅悬架采用被动座椅悬架,综合考虑座椅通过人体臀部传递给驾驶员的振动以及驾驶室地板通过人体脚部传递给驾驶员的振动。人-椅模型参考张鄂等[7]提出的五自由度混联坐姿人体集中质量模型,建立的人-椅模型如图2所示。图2中:zs为驾驶室底板位移输入,即油气悬架簧上质量位移;zr0为驾驶室座椅位移;zr1为驾驶员小腿位移;zr2为驾驶员下躯干位移;zr3为驾驶员上躯干位移;zr4为驾驶员头部位移。其他各参数定义如表1所示。
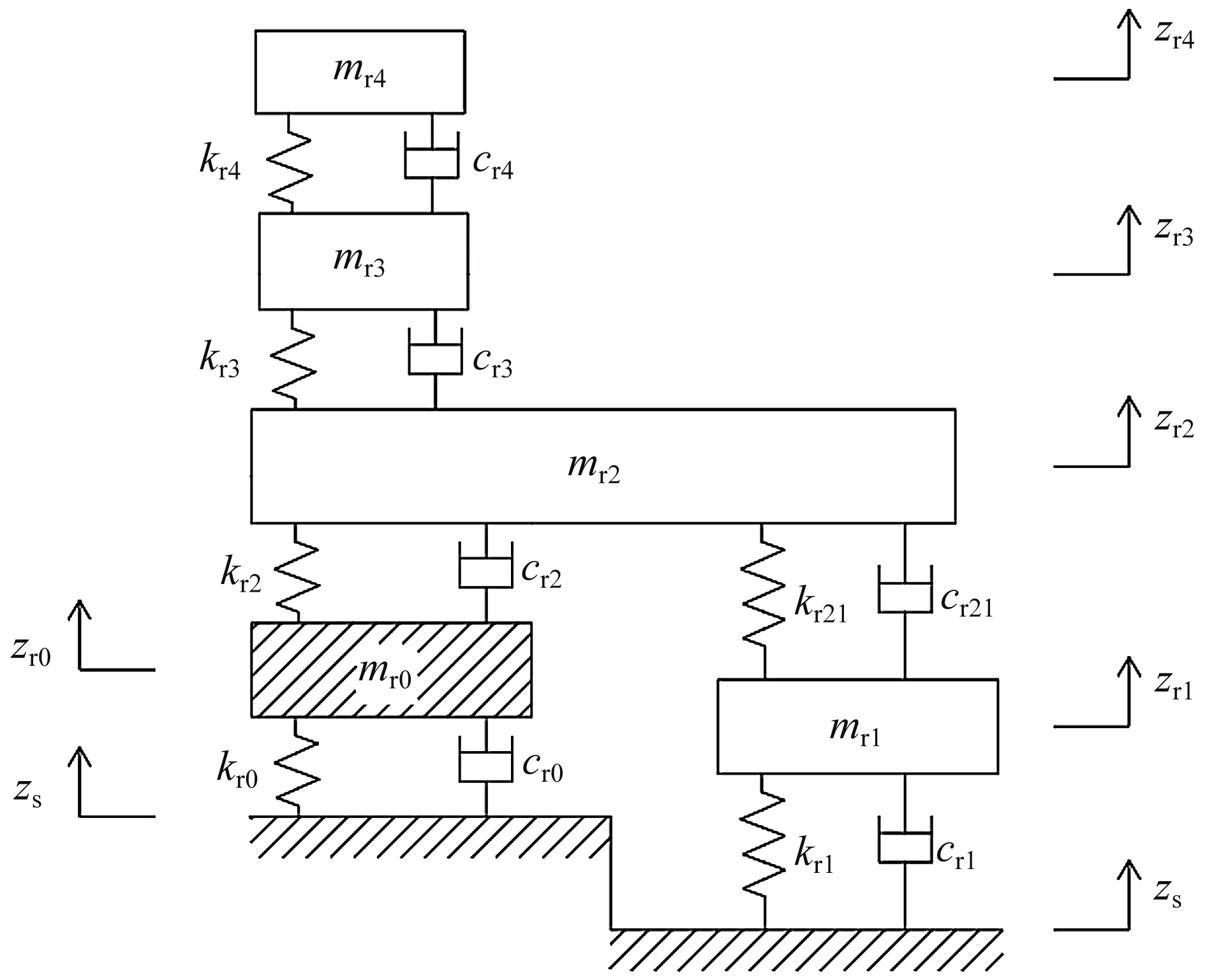
图2 人-椅力学模型Fig.2 Mechanical model of seat-driver

表1 人-椅力学模型参数定义Table 1 Parameter definition of seat-driver
对图2进行受力分析,可得人-椅模型动力学方程为
(3)
(4)
(5)
(6)
(7)
2 基于模糊动态输出反馈的增量式PID油气悬架控制器
2.1 增量式PID控制器
增量式PID控制方法是指将当前时刻的控制量与前一时刻的控制量作差得到新的控制量[8]。其算法函数为

(8)

由于在增量式PID控制算法中不需要进行误差累加,且当前时刻的控制增量仅与前几次采样相关,所以系统出现误动作对控制器的影响较小,较容易通过简单的加权处理获得比较好的控制效果。
2.2 模糊控制器
模糊控制器选取双输入单输出模型。以悬架车身的垂直速度作为误差信号E,以车身垂直加速度作为误差变化率EC,以控制信号U作为控制器的输出,以输出信号U作为增量式PID输入控制量。输入输出信号用7个指标表示,即负大、负中、负小、零、正小、正中和正大。以被动悬架为参照,选取输入输出的基本论域均为(-6,6),输入输出函数选取三角形函数。依据以上规则,利用软件建立模糊控制器,得到输入控制量曲面观测图,如图3所示。

图3 输出控制量曲面Fig.3 Surface observation chart of output control quantity
2.3 油气悬架模糊动态输出反馈控制器
在对车辆悬架系统的性能优化中,选取车身垂向加速度为主要观测指标,以提升车辆行驶中的行驶平顺性和驾驶舒适性。虽然传统PID可以起到一定的优化作用,但其控制过程中每次输出均与前一时刻状态有关,需要对误差进行累加,运算量相对较大,反应速度较慢。因此,车辆在行驶过程中面对多变的路况时可能无法迅速作出反应。基于此,考虑采用增量式PID对系统进行控制,增量式PID采用前一时刻控制量的增量作为当前时刻控制量,相较于传统PID控制过程,其不需要进行累加,具有反应速度快、误差较小的特点。
通过对增量式PID建模仿真结果发现:虽然传统的增量式PID控制加速度指标优化效果明显,但对悬架动挠度恶化十分严重。因此在增量式PID控制的基础上进行优化,将增量式PID的输入环节中加入模糊控制器。模糊控制器是一种基于某种特定规则的控制器,该控制器直接运用语言型控制规则对系统施加控制,出发点是相关专家的知识具有万能逼近的特点[8]。模糊控制器可以降低增量式PID对数学模型的依赖,具有较强的容错能力,且该控制器以现场操作人员或相关专家的经验为出发点,可以使控制器应用范围更广泛[9]。
考虑在增量式PID控制的基础上,引入模糊动态输出反馈环节进行控制器设计,以提高悬架系统综合性能。为了更好地适应不同的行驶路面,并考虑车身振动状态传感器信号范围,引入模糊动态输出反馈环节,该环节不仅可以对传感器信号过大、过小和有无等情况进行“模糊适应处理”,而且可以降低控制器对执行器的动态响应要求。模糊控制器设置于增量式PID输入端,悬架系统的反馈信号首先需输入到模糊处理器,然后与控制目标进行对比,接着输入增量式PID控制系统中,最后对悬架系统进行控制。其控制结构如图4所示。

图4 基于模糊动态输出反馈的增量式PID控制器Fig.4 Incremental PID control structure based on fuzzy dynamic output feedback
在实际仿真过程中,通过车身加速度传感器和速度传感器采集车身垂向速度及加速度信号。首先,输入模糊处理器进行模糊处理;然后,将模糊后的加速度信号输入增量式PID控制器,以作为控制器的反馈输入信号,经过增量式PID控制器输出悬架系统控制信号,进而控制悬架阻尼力;最后,为了增加动态输出反馈信号的可靠性,在模糊处理器的输入端,同时采用车身垂向加速度和垂向速度信号,已求反馈信号的稳定和可靠。其控制原理如图5所示。
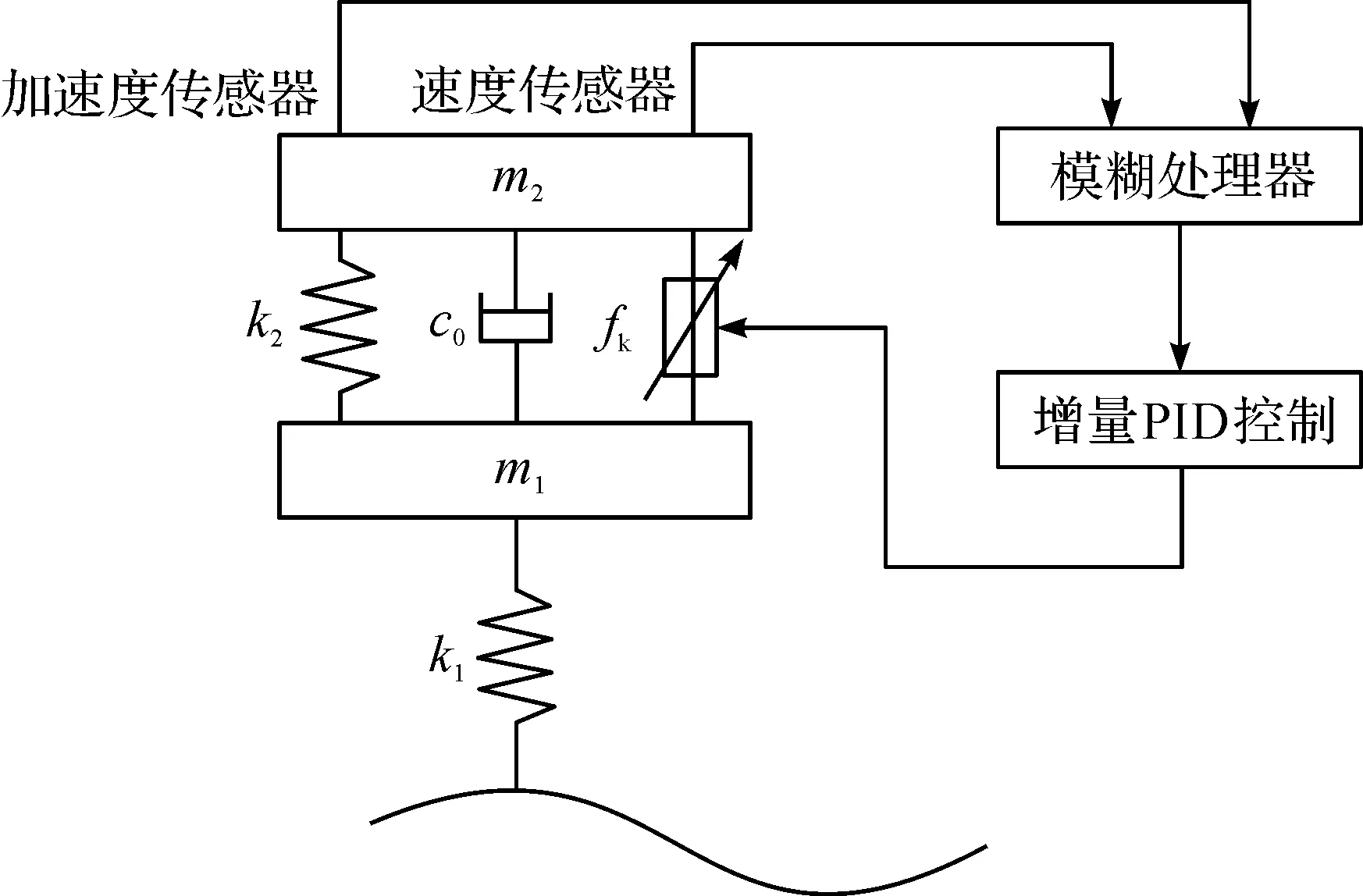
图5 基于模糊动态输出反馈的增量式PID控制系统Fig.5 Schematic diagram of incremental PID control based on fuzzy dynamic output feedback
3 重载运输车舒适性评价指标
3.1 重载运输车行驶平顺性指标
对车辆悬架减振特性进行评价的常用指标为
1) 车身垂向加速度。该指标会直接影响座椅悬架的输入加速度,进而影响车身颠簸程度。
2) 悬架动挠度。该指标会影响车身行驶过程中的状态,影响车辆颠簸幅度。
3) 车轮动载荷。该指标反应车轮与地面接触的作用力,过小会使车胎打滑影响驾驶安全,过大会影响车辆操作性。
选用上述3个指标对悬架减振性能进行分析。
3.2 重载运输车驾驶舒适性指标
为了验证驾驶员的驾驶舒适性得到提升,驾驶员在驾驶过程中的主观感受不可忽略。依据GB/T 4970—2009《汽车平顺性试验方法》[10]采用驾驶员全身加权加速度均方根值作为评价指标,其表达式为
(9)
式中:T为采样时间;av(t)为加速度加权时程。
则驾驶员总加权加速度aw表达式为
(10)
式中:kzi,awzi(i,j=1,2,3)分别为座椅坐垫上方、靠背及脚部的加权系数和加权加速度均方根值。依据GB/T 4970—2009《汽车平顺性试验方法》[10],取kz1=1;kz2=0.4;kz3=0.4。
总加权加速度均方根值的实质为人体最敏感的振动加速度有效值。但大量实验研究表明:人体对振动的感受程度受多种因素影响,且不同人对振动刺激的敏感程度也不同,具有很强的模糊性和随机性,普通概率统计无法反映这些不确定性。因此,为更好地获得重载运输车驾驶员的直观感受,在加权加速度均方根值评价法的基础上,进一步引入烦恼率作为驾驶员驾驶舒适性的评价指标,并给出相应的模糊隶属度和概率分布形式。
人对振动的主观反映分为“可接受”和“不可接受”两部分。烦恼率是指在一定的振动强度下认为该振动“不可接受”的人数占总人数的比例。
振动强度为aw的烦恼率A(aw)在连续分布情况下的表达式[11]为
(11)

(12)
式中:a,b分别为系数。进而可得到以下计算式
(13)
由式(9~13)得到烦恼率与加权加速度曲线如图6所示[12]。根据GB/T 13441.1—2007《机械振动与冲击-人体暴露于全身振动的评价》[13]的相关规定,在进行烦恼率计算时取:δ=0.3;umin=0.315 m/s2;umax=2.500 m/s2,并通过式(12)计算得出a=0.482 7,b=0.557 7。

图6 烦恼率与加速度的关系Fig.6 Relationship curve between annoyance rate and acceleration
4 重载运输车舒适性控制与分析
4.1 油气悬架系统参数
采用滤波白噪声法建立路面激励模型,其时域表达式[14-15]为
(14)

选用Matlab/Simulink软件对半主动油气悬架控制系统进行仿真[16]。悬架仿真参数如表2所示。

表2 半主动油气悬架参数Table 2 Parameters of semi active oil and gas suspension
4.2 重载运输车行驶平顺性分析
被动悬架、采用模糊PID控制的油气悬架以及基于模糊动态输出反馈的增量式PID控制的油气悬架的车身垂向加速度、悬架动挠度以及车轮动载荷对比如图7~9所示,其均方根值如表3所示。

图7 车身垂向加速度对比Fig.7 Comparison of vertical acceleration of vehicle body

图8 车轮动载荷对比Fig.8 Comparison of wheel dynamic load

图9 悬架动挠度对比Fig.9 Comparison of suspension dynamic deflection

表3 油气悬架性能指标均方根值对比
由图7~9和表3可知:相较于被动悬架,基于模糊动态输出反馈的增量式PID控制的油气悬架车身垂向加速度、车轮动载荷和悬架动挠度这3项指标均有明显降低;相较于传统对PID参数进行模糊控制的油气悬架,基于模糊动态输出反馈的增量式PID控制进一步降低了这3个指标。因此,综合考虑车身垂向加速度、车轮动载荷和悬架动挠度这3项指标,基于模糊动态输出反馈的增量式PID控制方法可以有效地提升车辆行驶平顺性,模糊控制和增量式PID联合控制的油气悬架控制效果优于模糊PID控制的油气悬架。
为进一步分析模糊控制和增量式PID联合控制对动油气悬架的控制效果。对车身垂向加速度进行频域分析,其结果如图10所示。

图10 车身垂向加速度功率谱对比Fig.10 Comparison of power spectrum of vertical acceleration of vehicle body
由图10可知:当频率值在低于5 Hz的低频范围内,相较于被动悬架,基于模糊动态输出反馈的增量式PID具有很好的控制效果;当频率值高于5 Hz,由于系统受到变频干扰的作用,基于模糊动态输出反馈的增量式PID控制效果与被动悬架基本一致。因此,基于模糊动态输出反馈的增量式PID在降低车身垂向加速度方面有很好的控制效果,可以有效地提升车辆行驶平顺性和驾驶舒适性。
4.3 驾驶舒适性控制结果及分析
被动悬架与基于模糊动态输出反馈的增量式PID控制的油气悬架驾驶员总加权加速度对比如图11所示。
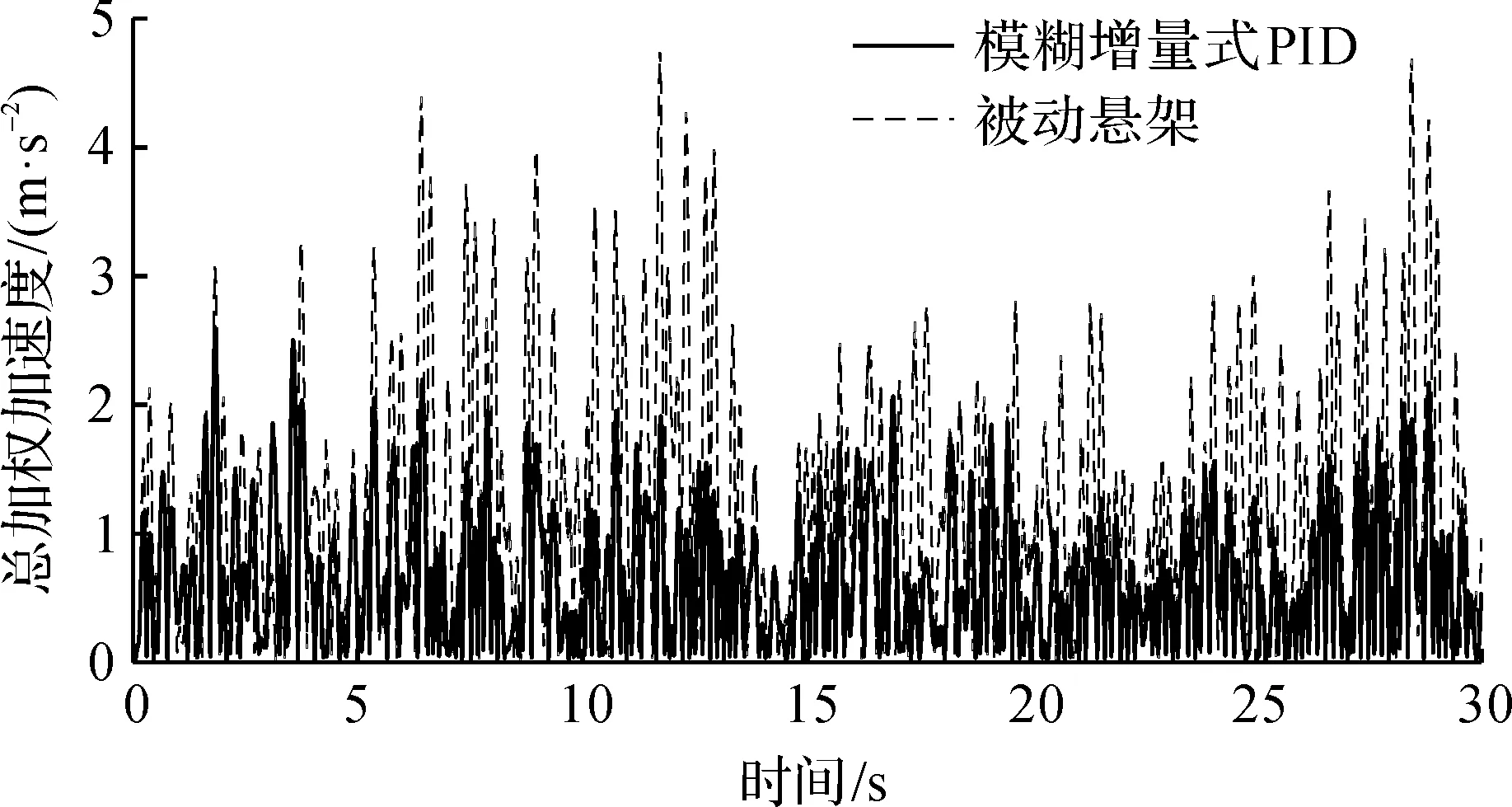
图11 驾驶员加权加速度对比Fig.11 Comparison chart of driver’s weighted acceleration
由图11可知:基于模糊反馈的增量式PID控制算法可以有效降低驾驶员总加权加速度,提高驾驶员的驾驶舒适性。通过计算可以得出被动悬架与基于模糊动态输出反馈的增量式PID控制的油气悬架驾驶员总加权加速度均方根值分别为1.56和0.83,后者较前者降低46.8%;进一步计算可得二者驾驶员烦恼率为分别为0.763和0.470,后者较前者降低38.5%,仿真结果如图12所示。因此,确定基于模糊动态输出反馈的增量式PID控制算法可以有效提升车辆行驶平顺性和驾驶员的驾驶舒适性。
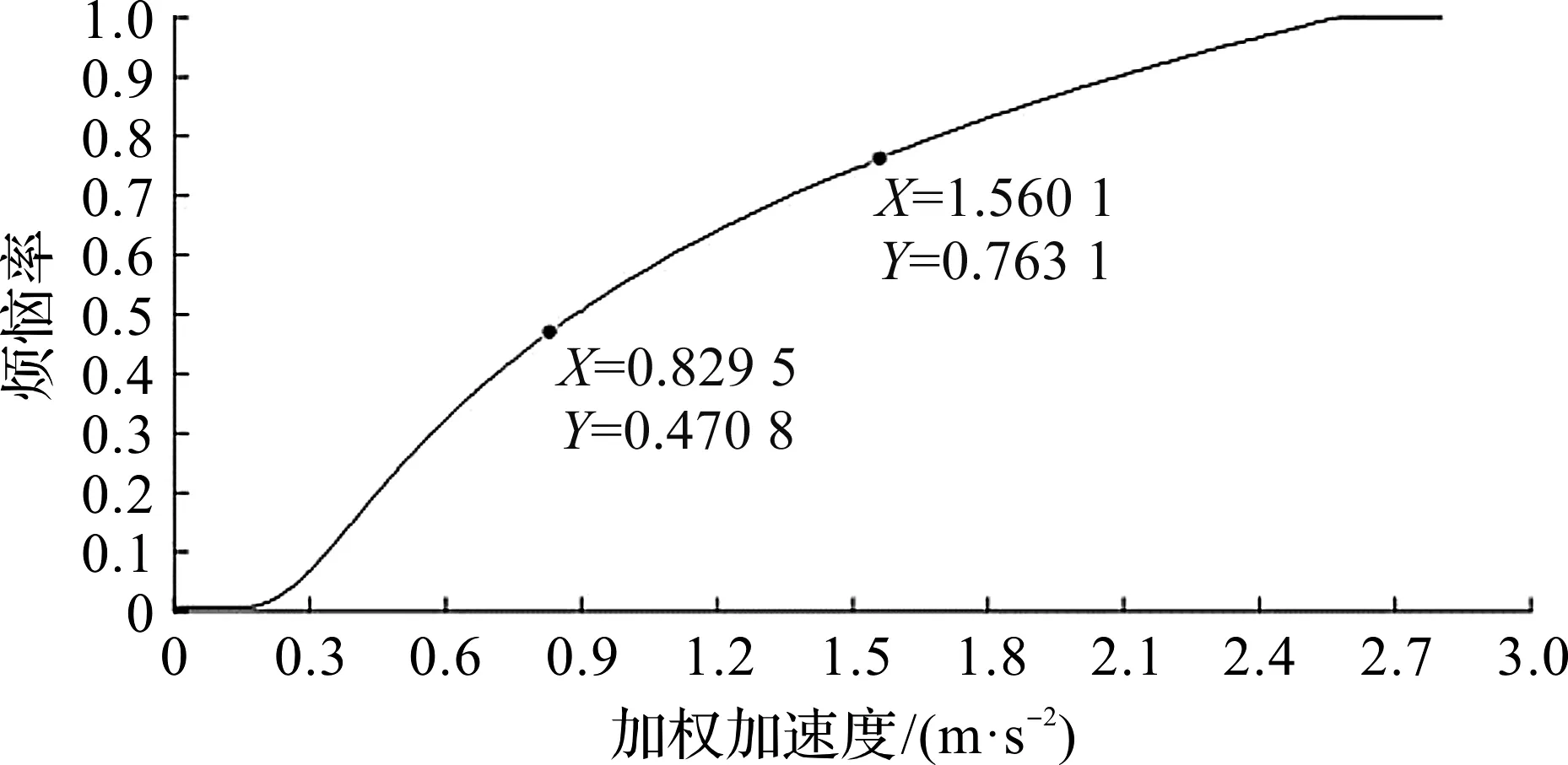
图12 驾驶员烦恼率对比Fig.12 Comparison of driver annoyance rate
5 结 论
以半主动油气悬架及人-椅集中质量模型为研究对象,首先,在人-椅模型中考虑了由座椅传递给驾驶员的振动以及由驾驶室地板传递给驾驶员腿部的振动;然后,基于模糊动态输出反馈的增量式PID控制器设计,以C级路面作激励信号,在车辆行驶速度为60 km/h的条件下进行仿真研究;最后,对基于模糊动态输出反馈的增量式PID控制油气悬架系统和模糊PID控制系统进行比较分析。仿真结果表明:相较于被动悬架,基于模糊动态输出反馈的增量式PID控制的车身垂向加速度的均方根值降低52%,悬架动挠度降低24%,车轮动载荷降低44%,驾驶员烦恼率降低38.5%;相较于模糊PID控制悬架系统,基于模糊动态输出反馈的增量式PID控制的垂向加速度的均方根值降低37%,悬架动挠度降低14%,车轮动载荷降低21%。因此,基于模糊动态输出反馈的增量式PID控制器的控制效果更优,可以提升油气悬架系统综合动态性能,在改善车辆行驶的平顺性以及提高驾驶员的驾驶舒适性等方面有较好的应用前景。
