实景三维模型在山区滑坡防护治理中的应用
2022-04-02单雨星
单雨星
(中铁第五勘察设计院集团有限公司,北京102600)
0 引言
安全是人们关注的第一要点,近年山区滑坡事件频频发生。如何防治山区滑坡亦成为重要话题。本文以北京某山区项目为例,来阐述实景三维模型在防治山区滑坡中的重要作用。
近年来,随着倾斜摄影技术的飞速发展,如何构建真实的三维场景,减少大量的人力物力,成为热门话题,实景三维模型应运而出。由于其具有完整、真实以及高精度的空间信息数据,实景三维模型数据已成为测绘地理信息领域较为重要的战略性资源,基于实景三维模型的地理信息应用也越来越受重视。无人机因其高效可靠、高速灵活、低成本、高精度等优点[1],采用无人机进行倾斜摄影测量是目前倾斜摄影测量的发展趋势,已应用于数字城市建模[2]、城市环境监测[3-4]、变电站数据采集和监测[5]、无人机搭载雷达[6]和城市更新基础数据调查[7]等。基于倾斜摄影的实景三维模型数据的生产方式凭借其采集周期短、制作成本低、真实感强等特点已成为当前实景三维模型领域最重要的数据形式[8]。本项目通过语义获取中心(ContextCapture Center) 软件完成山区实景三维模型的生产,阐述了在构建山区实景三维模型时遇到的问题及解决办法,以及实景三维模型的应用。
1 倾斜摄影技术
倾斜摄影技术目前已可以实现多个镜头获取影像,弥补了传统单镜头单角度获取影像的不便之处。单镜头获取影像只可获取垂直方向的地物地貌特征,对地物地貌的侧面纹理则稍有欠缺,但目前倾斜摄影技术已可在同一飞行平台的搭载下,同时安装多个相机,实现同一位置,不同姿态,获取地物地貌的垂直与侧面纹理信息。目前实景三维模型多是采用该种办法,进行模型的搭建。
倾斜摄影测量技术是将垂直影像与倾斜影像整合到一个工程文件中,而该工程文件能实现该地区的地物地貌的多视向、多维度的观察,从而实现二维影像的图片数据转化为依托软件展示的真实“三维”数据,使得“非现场”量测和分析在倾斜影像上得以实现[9]。
本项目采用飞马D200无人飞机对测区进行航摄,本项目所在地点为山区,高程落差较大,航摄范围较大。在无人机进行航摄时,应充分考虑到测区范围以及测区的高程落差,需结合山区最高点及最低点高程进行航线设计。本项目采用的是底视镜头为25 mm的相机焦距,倾斜镜头为35 mm的相机焦距,按照航摄基准面优于0.05 m进行航线设计。本项目航摄基准面取航摄区平均海拔点高程,最大限度保证山区航摄像片分辨率,以获得更清晰的原始影像。本项目航摄时设置参数为航向重叠度优于80%,旁向重叠度优于70%;航摄时充分考虑区域内地形点落差问题,保证航飞安全高度的同时也保证山区最高点和最低点的像片清晰程度以保证建模精细程度;航摄时严格控制每条航线内的基线长度,以确保飞机速度能够满足相机曝光间隔要求。
本项目影像质量特别强调影像清晰,反差适中,颜色饱和,色彩鲜明,色调一致,相同地物的色彩基调基本一致。有较丰富的层次,能辨别与地面分辨率相适应的细小地物影像,能够建立清晰的立体模型。影像上不应有云、雪、烟、大面积反光、污点、曝光过度等缺陷。
2 实景三维模型建模
本项目主要基于ContextCapture Center软件完成实景三维模型的生产。该软件支持多源数据融合建模,生成高精度的实景三维模型[10]。本项目通过对多张连续航摄影像进行处理,得到obj、osgb等多种格式数据。在CC_S3CCompose模块下生成索引文件,即可在ContextCapture Viewer模块将相关的实景三维模型场景展示出来,从而实现“非现场”量测和分析等操作。
实景三维模型基于ContextCapture Center软件完成实景三维模型的生产技术流程如图1所示。
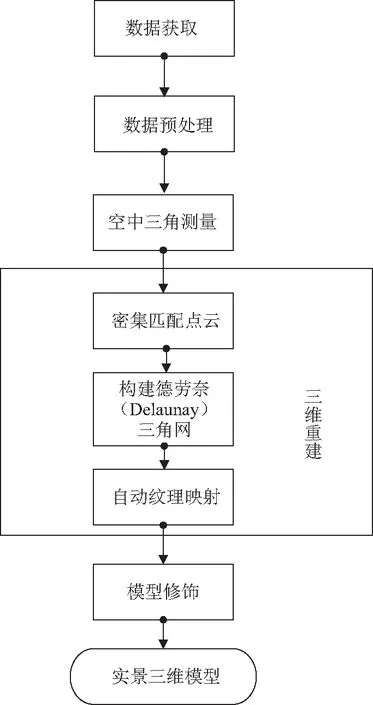
图1 实景三维模型的生产技术流程图
(1)数据获取,利用无人机搭载倾斜相机获取五镜头影像。
(2)数据预处理,包括影像重命名、影像调色等。对影像进行整理并重命名,检查影像质量,航摄完成后可得到每张航摄影像的外方位元素数据,包含三个线元素及三个角元素,即Longitude(经度)、Latitude(纬度)、Height(高程)、Omega(旁向偏角)、Phi(航向偏角)、Kappa(像片旋角)元素,整理后用于空三计算。外方位元素可通过定位定姿系统(position and orientation system,POS)测定。POS记录信息与影像成果对应一致,无缺漏和不匹配现象。检查相机文件是否齐全,相机检校文件应包含焦距、像主点偏心、相机畸变参数等。
(3)基于ContextCapture Center软件,进行空中三角测量、密集匹配点云、构建德劳奈(Delaunay)三角网、自动纹理映射和实景三维建模等[11]。此时得到的实景三维模型需通过第三方软件对模型进行修饰,得到最终的实景三维模型成果。
空中三角测量,根据倾斜影像对应的POS信息可以确定单张航片在空中的位置及相对位置关系,建立核线几何条件约束下的航带间影像点位置关系,采用逐级匹配策略自动进行像点连接,并进行无约束平差计算,剔除粗差较大像点后,添加实测像控点坐标进行约束平差计算,形成空三加密成果。在空三解算的基础上,进行实测像控点选刺,每个控制点应保证在不同的镜头上都进行关联,然后对像控点进行进一步解算,可得到质量报告。空中三角测量时应对控制点进行精度检查,确保控制点数据的正确性;对平差计算结果进行检查,确保空中三角测量结果满足实景三维模型的制作要求。
密集匹配点云,基于ContextCapture Center软件,采用高精度的影像匹配算法,自动匹配出所有影像中的同名点,并从影像中抽取更多的特征点构成密集点云,从而更细致准确的表达地物细节。
构建Delaunay三角网,基于密集匹配点云数据构建Delaunay三角网,Delaunay三角网具有的空圆特性和最大最小角特性保证其不会出现过于狭长的三角形,从而构成的无限逼近物体真实轮廓的模型。
自动纹理映射和实景三维模型建模,从每个三角网的坐标和方位最一致的照片中获取纹理信息并映射至三角网白模进行纹理贴图。三角网格在构建模型时,具有高效、快速等特点,所以能够对大面积场景进行形态模拟,构建近似于实景的三维模型,从而完成倾斜摄影三维立体重建工作。
(4)实景三维模型整饰。通过自动建模软件获取的数据虽然能够满足基本的建模要求,但对于一些重点区域,在模型细节及精度上仍然不能满足需求。结合本项目实际情况,山区树木较多且地形复杂,较易产生不规则漏洞、漂浮物、模型变形、纹理错误等问题,为解决上述问题,在本项目中对三维建模数据采用DP Modeler、模方(ModelFun)软件进行进一步的检查和精细化修正处理。
(5)实景三维模型精度检查。基于Context-Capture Viewer模块,展示实景三维模型,提取实景三维模型上的对应的控制点坐标,与实际获取的控制点坐标进行精度验证。
3 实景三维模型的应用
3.1 为平台搭建提供实时数据
本项目生成的实景三维模型,用于构建平台搭建。使用该平台浏览相关山区数据时,可直观浏览山区的地物地貌特征,实现“非现场”量测和分析等操作。
3.2 为现场调查人员提供便利
本项目主要是用于防护治理山区滑坡工作,因而现场地物地貌的调绘尤为重要,调查人员可通过实景三维模型了解当地实际情况,做好初步安排计划及设计思路等。
3.3 实时数据的留存
相对比传统二维像片,实景三维模型数据更加直观清晰,且在不借助其他数据的同时,已经可以获得较多的基础数据信息,在后期数据查阅时,更加便捷易懂。
3.4 可视化汇报
传统二维设计在展示复杂节点防护治理方案时,仅限于效果图、现场照片等途径,实景三维模型借助于软件可全方位展示出所需地点的虚拟现实场景,更加直观的、全面的展示设计方案,清晰表达出设计意图。
4 技术难点
在生产过程中,会遇到各种方面的原因,在此就列举一下本项目在生产三维模型时遇到的各种问题,以及当时的解决办法。
4.1 模型无法重建及分层
在三维模型生产过程中,遇到空三计算后部分影像无法重建模型或生成的模型分层等情况,如图2模型分层所示。

图2 模型分层
造成这种情况的原因,可能是因为航飞时,相机参数设置不对造成的;也可能是因为部分原始影像位置、姿态不好造成的;亦可能是工程建立参数设置不对造成的。
因而,遇到这种情况,首先检查航飞时,相机参数是否正确;再次检查工程设置是否出错,在工程未出错情况下调整空三策略,开展多次空三计算使数据匹配度更加精确。对于存在模型数据分层情况的位置,对其增加连接点重新建模可以解决部分问题,其次可在不影响模型纹理的情况下,将位置、姿态不好的航摄像片选出并剔除,对于处理后仍然模型分层的区域,采用重新航飞的方法进行解决,成果如图3修改后模型所示。

图3 修改后模型
4.2 模型存在悬浮物、漏洞、色差
进行实景三维模型建模时,原始航摄数据和空中三角测量质量会直接影响模型几何精度和美观程度,而由于受到飞机姿态不规范、拍摄盲区、和同名点匹配错误等影响,所生产的实景三维模型会在建筑物、地面等场景出现模型空洞,特别是在模型的边缘区域,导致实景三维模型中会存在无三角网的空洞区域,如水面等。空三加密过程,像片及POS成果的质量问题会导致出现同名点匹配错误,进行纹理信息映射时,对于尺寸较小的现状地物也会有纹理信息丢失,导致形成漂浮物,如图4修改前悬浮物图所示。

图4 修改前悬浮物图
遇到这种情况时,本项目采取的措施为:在生成.osgb格式数据的同时,获取同一位置的obj格式数据,在第三方模型修改软件中对每一块模型进行结构修改,在影像处理软件中对存在问题的模型纹理进行调整,再通过ContentCapture Center软件对.osgb格式数据进行更新,在结构更新的过程中,纹理会自动匹配贴图,保证了最终模型效果。对于色差明显的局部进行匀光匀色处理,使其达到模型整体自然过渡的效果,成果如图5修改后悬浮物图。
4.3 模型纹理弱
生成的实景三维模模型出现模型纹理弱的情况时,首先分析纹理弱的原因,本项目模型纹理弱的原因主要为:无人机航摄时受到季节、天气、无人机本身参数设置的影响较大。如在冬季无人机航摄时,大风天气无人机无法起飞;微风时,无人机机身晃动,导致航摄像片无法使用;落雪时,无法看清地物;冬季透光率不好,导致背阴面的纹理不好等;夏季航摄时,部分地质灾害点被植被遮盖等。无人机本身参数设置出错,造成航摄影像清晰度不达标等。生产的模型如图6纹理不好模型图所示。

图6 纹理不好模型图
在这种情况下,首先对这种影像进行进一步预处理,如调色、明暗处理等方案,在空三计算时,修改设置参数等,对于处理后仍然模型纹理弱的区域,采用重新航飞的方法进行解决,成果如图7重飞航片后模型图所示。

图7 重飞航片后模型图
4.4 不同时间段模型接边
需在不同时间段进行航飞工作,因天气、季节、植被等一系列影响因素,会导致同一区域不同时间段航摄像片所生成的模型颜色、地物地貌皆有不同的情况出现,因模型须在同一个场景下展示,因而做好不同时间段模型接边尤为重要,图8正常瓦片重叠度的模型图为未做好不同时间段模型接边时的模型效果。

图8 正常瓦片重叠度的模型图
在这种情况下,应尽可能选取同样天气状况下进行补飞,避免出现较大的接边色差;对于接边位置植被种类不同、植被高度不同引起的模型空洞,可考虑增大模型重叠度进行一定程度的规避,成果为图9增大瓦片重叠度后的模型图。

图9 增大瓦片重叠度后的模型图
5 结束语
在本次山区项目进行模型重建遇到多种问题,例如模型无法重建及分层问题,模型存在悬浮物、漏洞、色差等问题,模型纹理弱问题以及不同时间段模型接边问题。但是针对落差大,复杂周边环境的山区,实景三维模型在山区滑坡防护治理时,起到了一定的作用。例如本次北京某山区中,实景三维模型为平台搭建提供实时数据、为现场调查人员提供便利,更能做到实时数据的留存、可视化汇报等。在本次项目中依旧存在着自己的局限性,例如本项目依靠庞大的电脑集群的支撑,对电脑的性能配置要求也较高等。
