基于车载移动测量系统的大比例尺地形图数学精度评价方法
2022-04-02黄昌狄葛中华杜浩强万
黄昌狄葛中华杜浩强万 斐
1浙江省测绘科学技术研究院,浙江 杭州,310012
目前,测绘成果质量检验仍以全站仪、RTK(real time kinematic)等传统测量设备为主要数据采集手段,结合外业巡检、内业辅助检查等方式实现对测绘成果数学精度、地理精度、属性精度等不同质量元素的评价。当前测绘成果质量评价手段存在外业占比高、数据采集效率低、工作环境艰苦等缺点。不断增长的测绘产品质量检验需求、对新型测绘成果质量检验方式及方法的选择、检验人员对降低工作强度和改善当前工作环境的愿景是当前测绘成果质量检验行业面临的问题。车载移动测量系统等高新测绘技术装备的不断发展与实际运用,为测绘成果质量检验行业质量评价方式转型、服务质量优化、检验效率提升带来契机。
车载移动测量系统与全站仪、RTK等传统测量设备相比,具有精度高、速度快、工作强度低等优点,近年来在大比例尺数字地形图、三维模型等不同类型测绘产品生产中得以实际应用[1],但鲜有技术人员在测绘成果质检领域展开相关技术应用研究。徐寿志、唐德利等[2-4]对车载移动测量系统检校及精度评定、点云误差分析等方面开展了研究。在测绘实际生产运用中,吴波等[5]将车载移动测量系统运用于大比例尺测图工作,利用点云和影像数据进行大比例尺地形图制作与检查,与传统测图方法进行比较、验证车载移动测量技术的可靠性及高效性;李俊等[6]在农村土地承包经营权确权工作中运用车载移动测量系统,通过对测图精度的估算分析并筛选出符合成图精度的点云成果进行作业,改变了原有作业方式,提升了工作效率;此外车载移动测量系统在三维建模[7]、城市部件[8,9]、地形图修测[10]、高速公路改扩建[11]等测绘项目中也得以应用,实现了外业工作量的缩减及工作效率的提升。此外,曾卓、刘如飞等[12,13]对车载点云特性开展分析,提出基于建筑物角点的机载和车载点云数据配准方法,实现建筑物角点的有效提取。为此,本文采用车载移动测量系统,基于大比例尺数字地形图测绘成果质量检验工作内容及流程,结合点云精度符合数学精度评价要求的点云成果及地形图约束的房角点、高程点精度检测点自动化提取算法,提出一套全新的大比例尺地形图数学精度快速评价方法。实验表明,该方法降低外业数据采集工作强度,改善检验人员外业工作环境,提升测绘成果数学精度评价效率。
1 大比例尺地形图数学精度评价方法
本文方法的主要原理是立足于大比例尺地形图测绘成果质量检验流程,结合车载移动测量系统数据采集精度高、速度快等特性,首先采用车载移动测量系统完成对样本范围内道路两侧高精度三维点云的采集,结合车载轨迹及点云解算软件完成数据解算;其次基于车载轨迹质量筛选,结合基于地形图约束的精度检测点自动提取算法,实现检测点提取并实现精度评价。其主要流程如图1所示。
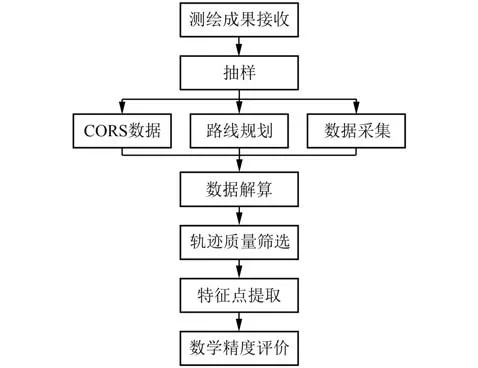
图1 方法流程图Fig.1 Flow Chart of Method
1.1 数据采集与解算
数据采集与解算,即根据样本分布和道路通达情况规划采集线路并完成样本区域内道路两侧高精度三维点云采集并完成数据解算工作。主要包含以下几个步骤:
1)线路规划。根据样本地形图道路两侧地物的分布及道路通达情况,规划采集线路,确保在数据采集过程中系统无长时间失锁情况同时样本图幅内有足够的平面、高程精度检测点。
2)基准架设或选取CORS(continuously operating reference stations)基准站。基于采集路线分布,在测区范围的概略中心架设采集频率为1 Hz的GNSS观测站或选取测区附近的CORS基准站。基站距离作业区域距离一般为20 km左右为宜,最远不超过50 km,基站应同时接收存储GPS、GLONASS、BeiDou等卫星数据。
3)数据采集。完成车载移动测量系统初始化工作后,沿着采集路线完成数据采集工作。在系统初始化过程中适当延长IMU(inertial measurement unit)动态激活时长,尽可能缩小GNSS系统与IMU系统之间的误差;在结束采集做静态观测之前也采用绕8字等形式进行动态激活,以提升轨迹解算精度。
4)数据解算。对基站数据、车载流动站GNSS及IMU数据进行差分解算,在解算过程中根据项目实际情况适当调整卫星高度角、卫星PDOP(position dilution of precision)值等参数,使数据采集路段的轨迹分离度尽可能小,最终生成三维激光点云,点云成果如图2、图3所示。
图2 三维激光点云(俯视)Fig.2 3D Laser Point Cloud(Over Looking)

图3 三维激光点云(侧视)Fig.3 3D Laser Point Cloud(Side View)
1.2 车载轨迹质量筛选
车载轨迹质量筛选,即根据车载轨迹中质量因子的分布情况,结合实际项目经验值,对车载轨迹分割以保留轨迹精度符合质检要求的区间,最终实现不同精度点云的分离。
质量因子(Q值)是用以描述模糊度固定的和固定状态,即浮动/固定模糊度状态和卫星几何状况。质量因子的值域区间为1~6,其中1表示模糊度完全固定,2~3表示部分模糊度固定,4表示浮点解,5~6表示使用伪距,相关质量因子描述及三维参考精度如表1所示。
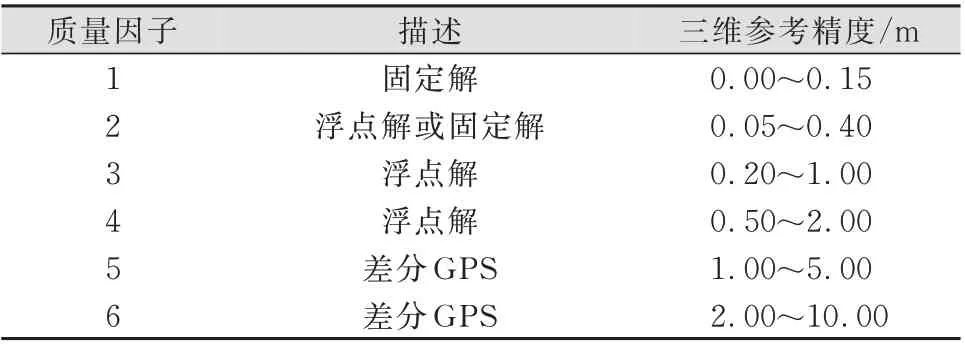
表1 质量因子及精度分布Tab.1 Quality Factor and Accuracy Distribution
在实际的检验项目中结合高精度平面、高程精度参考点对质量因子所反映的精度进行了验算,结果表明质量因子为1和2时点云精度可靠、稳定,当质量因子超过3时精度差且不稳定,精度验算折线图如图4所示。因此,在测绘成果检验中,对质量因子超过3的部分点云筛选并删除,精度检测点的提取作业在质量因子为2以内的点云内完成。

图4 质量因子精度验算结果折线图Fig.4 Breakdown Chart of Quality Factor Accuracy Checking Results
1.3 特征点提取
特征点自动化提取,即基于地形图房角点、高程点等位置约束条件,在高精度三维激光点云中实现精度检测点的自动化提取,结合人工遍历的方式核实精度检测点提取的正确性。该环节主要包含平面及高程特征点自动化提取两部分。平面特征点的自动化提取是基于地形图约束的点云房角点自动提取,该技术是在地形图中提取某房屋角点的两条边线进行缓冲分析,利用Ransac算法对缓冲区范围内的点云进行平面拟合并进行空间相交运算,得到拟合房角点。该方法可有效提高房角点搜索的速度和准确性,房角点自动化提取示意图如图5所示。高程特征点的自动化提取是利用地形图中高程点的平面位置构建缓冲区并与点云进行空间分析,得到相交点云点集,建立基于统计分析原理的筛选规则对相交点云的高程值进行筛选,得到目标高程点的高程值,高程点自动化提取示意图如图6所示。

图5 房屋角点提取Fig.5 Corner Extraction of Houses

图6 高程值匹配Fig.6 Elevation Matching
1.4 数学精度评价
数学精度评价,即根据自动提取的平面、高程精度检测点结合样本地形图,结合数学精度评价机制对样本地形图实现数学精度评定,该部分内容基于已有的数字地形图精度统计软件实现。
2 实验及结果分析
本次实验以某山区1∶2 000大比例尺地形图测绘成果检验项目为对象,共选取了6幅50 cm×50 cm的1∶2 000标准图幅,图幅内包含房屋、道路、山地等多种地物,样例如图7所示。分别采用全站仪、RTK等传统方式和车载移动测量系统两种方式对实验样本数据开展对比实验。

图7 1∶2 000样本图Fig.7 1∶2 000 Sample Diagram
选取的6幅样本地形图平面精度允许中误差均为1.6 m,高程精度允许中误差均为1.2 m。两种实验方式的样本平面、高程精度对比图分别如图8、图9所示。

图8 平面精度对比图Fig.8 Plane Accuracy Contrast Map

图9 高程精度对比图Fig.9 Elevation Accuracy Contrast Map
对比两种实验方式对样本图幅的平面、高程精度评定结果可知,两种实验方式精度评定结果相近,均能较好反应样本图幅的数学精度。实验还表明,6幅样本数据平面及高程精度检测点采集工作采用传统方式需两人一天,采用车载测量方式只需两人半天,工作效率提升2倍。
3 结束语
本文基于车载移动测量系统,结合1∶2 000大比例尺地形图测绘成果质量检验内容及流程,在地形图中房屋角点、高程点等位置约束条件下提出平面、高程等精度检测点的自动化提取算法,给出了基于车载移动测量系统的新型大比例尺地形图数学精度评价方法,并与全站仪、RTK等传统测量方式进行精度对比验证其有效性。实验结果表明,该方法能大幅提升大比例尺地形图数学精度评价效率,改善检验人员工作环境,降低工作强度,为测绘成果检验方式提供新思路,为今后进一步开展车载移动测量系统应用研究拓宽新领域。
