一种用于污水池中曝气器的清洗机器人系统设计
2022-03-29廖子铮罗思麟薛涵方
廖子铮,罗思麟,薛涵方
(哈尔滨工程大学 智能科学与工程学院,黑龙江 哈尔滨 150001)
当今工业发展迅速,工业污水的排放逐渐增多,影响着实际生产生活,而在污水处理环节中,最为紧要的是能够处理废水中好养生物量的维持,而曝气盘就是这一生物量维持的关键所在,曝气盘能够曝气产生该生物维持生存所需的溶解养量以及促进水下流体运动,增加处理废水的接触面积从而提高对污水处理的效率。实用是曝气盘的主要优点,但是也有一个较为明显的不足之处,即使用到一定时长时会由于流体挤压以及生物量限制等原因出现需要更换的情形,而一方面更换曝气盘需要到水下一定深度处进行作业,且水下工况较为复杂,另一方面以人为主体的单元作业需要携带一定的设备,包括支撑人体上浮下沉的缆绳,作业于曝气盘的酸碱溶液,以及一定的水下作业工具,作业效果也不太理想。伴随着水下机器人技术的成熟发展,曝气盘清洗机器人设计成为可能。
1 总体设计
曝气盘清洗机器人总体设计方案分为硬件设计、软件设计以及机械设计三部分,其中硬件设计主要包括选取电源模块及充电模块、稳压模块、通信模块、摄像采集图像传输模块和单片机控制;软件设计主要包括双目视觉定位的目标跟踪,实现解算相对位置以及目标匹配跟踪识别,声呐的目标测距、清洗器的压力传感匹配应力抓取设计和惯性器件的解算以至于实现对机器本体的测位测姿,机械臂压力传感匹配应力抓取设计、推进器的运行移动以及姿态控制;机械设计主要包括密封舱体、端盖设计、舵机支架、浮力材料和电缆。
整个系统的工作环境分为水上和水下。在水上,操控台发出的操控指令经过信号转换器增强、编码后进入电缆进行电传输;输线装置根据水下载体的驶出距离调节电缆线长度;电力传输系统将电力通过可通大电流的电缆向水下载体供电。在水下,通过电缆的传输,有线图传系统将载体中2个摄像头采集的图像传回水上操控台;电力通过电缆流向电源转换系统,转换成不同的电压向各个需电装置供电;传输的指令信号经过水下载体搭载的信号转换器转换成上位机可以识别的串口通信协议,实时进行操控。上位机连接着双目视觉系统,对曝气器的相对位置进行解算,同时用声呐测距系统进行辅助。上位机与下位机进行实时通信,让下位机控制清洗装置和推进器完成相应操作,而与下位机向连接的惯导系统,可以更快地让水下载体校正速度和姿态。
2 硬件设计及机械设计
硬件设计主要包括选取电源模块、充电模块、稳压模块、通信模块、摄像采集图像传输模块和单片机控制。其间硬件设计中电源选取2块4 200 mAh的8.4 V电源以及3块5 200 mAh的16.8 V电源,稳压采用4块逐飞生产的MP2482稳压模块以及2块专供12 V的2 596稳压模块,其间MP2482可稳出3.3 V直流电以及5 V直流电,3.3 V供给于单片机,5 V供给于机械臂舵机以及PC上位机以及惯导,12 V供给于图传以及6个推进器,包括4个垂直推进器以及2个水平推进器,推进器型号为ROV350KV,其适用电压范围为11~25 V,其在12 V下推力为1.74 kg,电流为7.5 A。
水下推进器需要进行水密封,通过测试验证水密性良好。无刷电调对占空比信号进行解调,来控制3线无刷电机。根据其特性:标准PWM信号脉冲时间:1 000~2 000μs之间,以1 500μs为0转速,1 000~1 500μs反转、1 500~2 000μs正转。稳压模块由高电压转为低电压,为开关稳压,通过电路的开关来调节有效电压值,得到器件适应电源。整个机械臂共采用了6个舵机,有6个自由度,从机械的角度来说可以在一定范围内轻松抓取物体,有着良好的自由特性。依此得,驱动电路设计如图1所示、惯导电路的PCB设计如图2所示、惯导电路设计如图3所示。
图1 驱动电路设计
图2 惯导电路的PCB设计

图3 惯导电路设计
机械设计主要包括密封舱体、端盖设计、舵机支架、浮力材料和电缆。水下清洗曝气盘机器人机械设计的3D建模图如图4所示,外体结构如图4(a)所示,曝气器抓取结构如图4(b)所示。其中,1为水下垂直推进器提供垂直升力;2为浮力材料,为静止载体提供额外的浮力;3为水下水平推进器提供水平升力;4为水下载体框架用来搭载工具;5为水下清洗工具用来拆卸曝气器;6为水下摄像头用来进行双目视觉以及图传;7为水密电机用来拆卸曝气器;8为丝杠提供定位机构的移动轨迹;9为螺母;10为定位机构用来提高抓取曝气器的成功率;11为卡箍用来固定曝气器。

图4 水下清洗曝气盘机器人机械设计
3 软件设计
软件设计主要包括双目视觉定位的目标跟踪,实现解算相对位置以及目标匹配跟踪识别、声呐的目标测距、清洗器的压力传感匹配应力抓取设计和惯性器件的解算以至于实现对机器本体的测位测姿、机械臂压力传感匹配应力抓取设计、推进器的运行移动以及姿态控制。
为了操作机械臂更加方便。在程序设计上,通过控制台向机械爪发送期望位置,通过对机械臂的每个摆臂和关节的力学分解和控制每个舵机的转角让机械爪处于期望的俯仰角、偏航角与滚动角。机械臂的摆动存在一定的范围,为了保护舵机不出现堵转现象,需要对其进行占空比限幅,机械爪的操控程序流程如图5所示。

图5 机械爪的操控程序流程图
操控台根据图传画面操控载体寻找曝气器并清洗,由双目视觉系统和声呐测距系统共同辅助操控,并由惯导得到的速度、姿态信息通过控制水下推进器的转速实时校正,当曝气器进入清洁工具的捕捉范围时,清洁工具捕捉并开始清洗。清洗曝气器程序流程如图6所示。
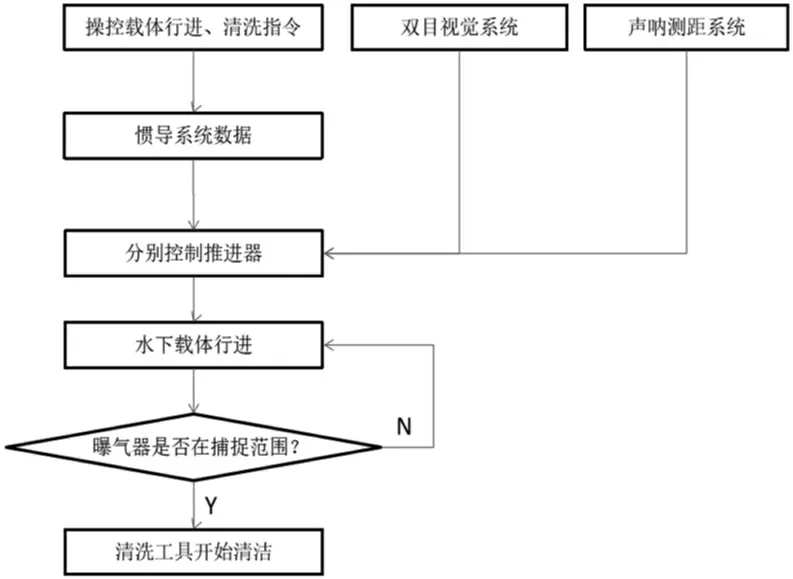
图6 清洗曝气器程序流程图
声呐通过计算发射出的声脉冲返回时间得到目标相对位置距离,根据脉冲发射来测量目标的方位角,因此可以得到一个由反射脉冲强度和方位角组成的图像。如图7所示,待测目标在点线范围内。
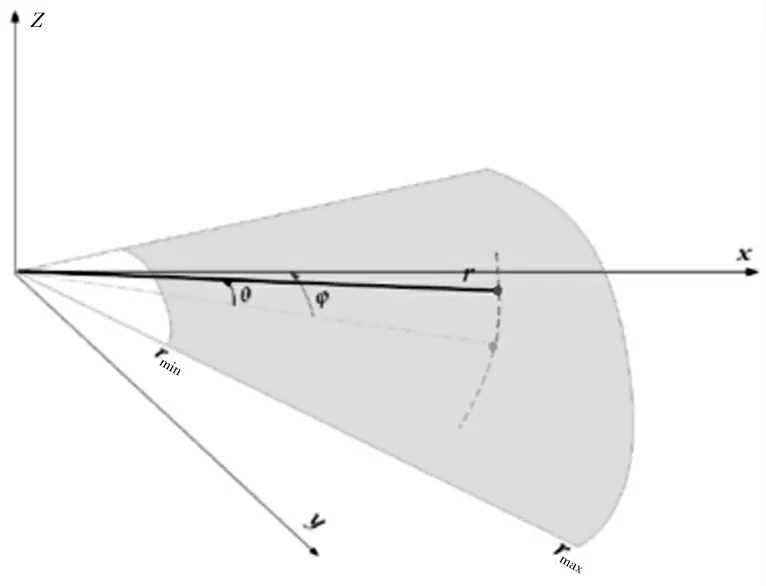
图7 声呐测距系统效果图
用双目视觉系统来对曝气器的边缘进行提取以及测量方位,因为在水中清晰度不一定满足要求,所以需要声呐系统进行辅助。如图8所示,安装在载体的两个摄像头在像素中对目标提取有不一样的定位,经过标定后再根据三角定位法得到目标方位与相对距离。

图8 双目视觉系统效果图
4 结束语
本文设计了一种用于污水池中水下曝气盘的清洗机器人,通过理论分析和实际设计,得到如下结论:
(1)采用Solidworks软件实现对于机械结构的设计,依此建立起用于污水池中水下曝气盘的清洗机器人机械设计。
(2)依据流程分析实现相关软件设计,依此建立起用于污水池中水下曝气盘的清洗机器人软件设计。
(3)完成了一种用于污水池中水下曝气盘的清洗机器人总体设计分析,依此建立了以曝气盘为对象的清洗机器人设计。
