下颌吸附手的结构设计及感知单元优化分析
2022-03-28李奇奇许德章
李奇奇,许德章
(1.安徽工程大学 人工智能学院,安徽 芜湖 241000;2.芜湖安普机器人产业技术研究院,安徽 芜湖 241007)
新型冠状病毒肺炎的猛烈爆发,引起了国内外的广泛关注。在对重型和危重型新冠肺炎患者救助时,大量医护人员在气管插管操作中感染了新冠肺炎病毒。研究表明,医护人员在气管插管操作时,需要近距离观察病人口腔[1],面临巨大的感染风险,机器人替代医务人员完成气管插管操作,无疑具有重大社会意义。
医疗机器人是机器人应用到医疗领域的一次创新。目前,医疗机器人主要应用于神经外科、骨科、腹腔、血管、假肢和外骨骼等领域,而应用于人体气管插管领域的研究屈指可数。在2010年,Tighe等[2]使用达芬奇机器人完成了两例模拟人气管插管实验,开创了机器人气管插管的先例,实验证明了达芬奇气管插管操作理论上可行。2012年,Hemmerling等[3]研制出一种名为开普勒的气管插管机器人,开展了模拟人和动物可行性实验研究[3]。2018年,中国人民解放军海军军医大学的王新宇,研制了一款遥操作气管插管机器人系统,并在动物猪上,验证了气管插管机器人系统的可行性[4]。以上气管插管实验研究,都是基于模拟人或动物口腔打开的情况下进行研究的,忽略了口腔从闭合状态运动到最大开口状态的过程。为满足口腔自主打开的需求,本文从保护下颌、稳定下颌受力和感知下颌运动状态角度出发,设计了一款带有吸附、缓冲、力探测的吸附手,通过吸附手吸附并牵引下颌,使口腔打开。
1 吸附环境分析
1.1 下颌开闭口运动分析
下颌骨是人体骨头中相当复杂的一块骨头,其上附着了大量的肌肉组织。在神经系统的调控下,下颌肌肉协调运动,使下颌可以完成开闭口、侧向咬合、前伸与后退咬合等一系列动作。在下颌开闭口运动中,假设下颌两侧的肌肉组织发达程度一样,下颌的开口运动可以分为三个阶段:(1)小开口:髁突轴心位于关节窝中心处,下颌骨运动为绕髁突轴点的转动;(2)大开口:髁突沿着关节窝滑动兼转动,下颌骨做滑动兼转动运动;(3)最大开口:髁突继续运动,被关节盘及肌肉组织约束关节结节下方,下颌骨仅做转动[5]。闭口运动是开口运动的逆过程,下颌骨结构如图1所示。
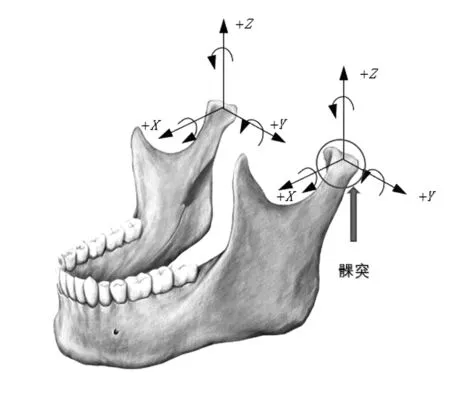
图1 下颌骨结构图
1.2 吸附位置分析
在下颌骨表面上,附着大量的皮肤肌肉组织,皮肤肌肉组织的软弹特性不利于力的传递[6],吸附位置应该选取为软弹特性较差的区域。根据解剖学理论,颏隆凸周围的皮肤肌肉组织与下颌紧密结合且具有较高的刚度,能更好地传递下颌吸附手的作用力。另一方面,根据杠杆原理,在颏部施加作用力会得到最长的力臂,利于牵引下颌骨运动。由此可见,选取颏隆凸为吸附位置是较为合理的,吸附位置如图2所示。
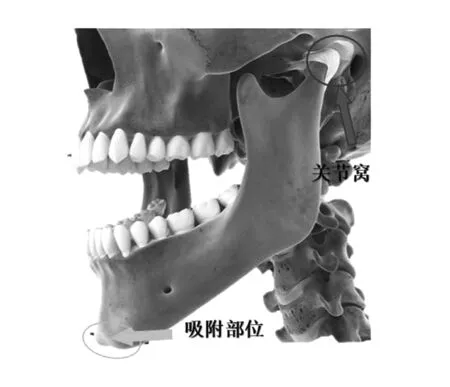
图2 吸附位置
1.3 外力牵引下下颌运动分析
在开口运动中,二腹肌、翼外肌、舌骨下肌群收缩,牵引着下颌骨做降颌运动,与此同时翼内肌、咬肌、颞肌被拉长,阻碍降颌运动。该运动过程中,下颌骨的受力如图3所示。
(a)肌肉牵引处的下颌受力图

(b)质心处的下颌受力图
通过上述肌肉牵引下的下颌受力图,下颌骨需要在两种力作用下才能做降颌运动,一种力是下颌边缘处的拉力,另一种力是髁突处的拉力。当髁突中心被约束在一点时,下颌骨边缘受拉,下颌骨做转动运动;当髁突以及下颌骨边缘受拉时,下颌骨做滑动兼转动运动[7]。然而,下颌吸附手只能对下颌骨边缘施加作用力,这显然不能满足两种力作用下的降颌运动。为了解决一个主动力作用下的降颌难题,通过对比肌肉作用下的降颌轨迹,提出外力作用下的降颌轨迹,其运动轨迹如下:(1)髁突先小幅度转动,使下颌下降1左右;(2)髁突沿着关节窝滑动至关节结节处;(3)下颌转动直到最大开口。外力作用下下颌运动轨迹的依据如下:第一个阶段与下颌的小开口运动相似,下颌小幅度的打开,便于下颌滑动,该阶段下颌吸附手需要提供一个转矩;第二个阶段,下颌骨随着髁突一起在关节窝滑动,主要是使髁突运动到极限位置,并被有效的约束,为下颌骨定轴转动做准备,该阶段下颌吸附手需要提供一个二维力;第三个阶段,只需提供下颌转动所需的外力,慢慢运动到最大开口即可,该阶段下颌吸附手需要提供一个转矩。以上理论分析,验证了外力作用下下颌开口运动的可行性。
2 下颌吸附手结构设计
2.1 整体结构设计
为了更好地保护人体下颌组织、提高下颌运动稳定性以及感知下颌运动状态,设计了一款带有吸附、缓冲、力感知的吸附手(见图4)。机械吸附手的吸附单元与缓冲单元通过螺栓相连接,缓冲单元与十字梁弹性体也是通过螺栓连接,十字梁弹性体通过立柱与快换工具侧连接,快换机器人侧连接机械臂。
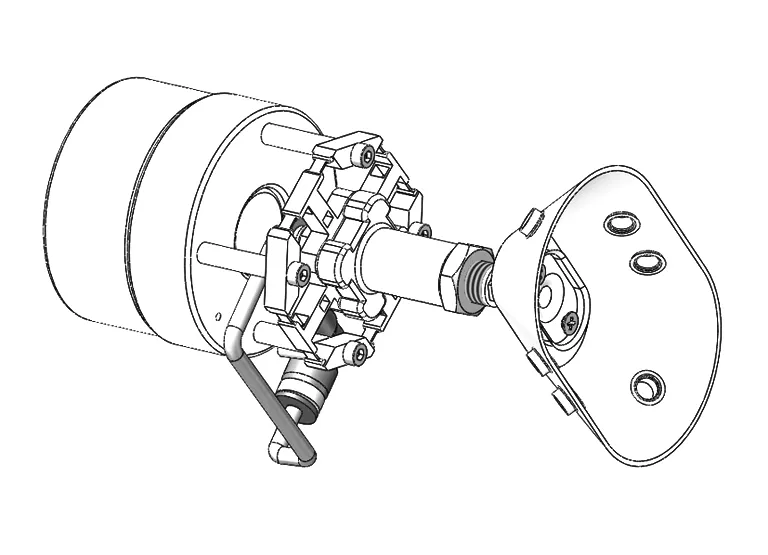
图4 吸附手整体结构
2.2 吸附单元设计
人脸部皮肤具有较柔软的特性,为了保护皮肤组织、提高吸附手的吸附力和稳定下颌受力,设计出一个与下颌颏隆凸相贴合的带有多个吸盘的吸附装置。吸附装置主要有吸盘和曲面薄板组成,曲面薄板上共有5个区域设有吸盘,中心处吸盘吸附颏隆凸中心,提供最大吸附力;其他处吸盘吸附颏隆凸周围,起到稳定下颌受力的作用。吸附单元结构如图5所示。
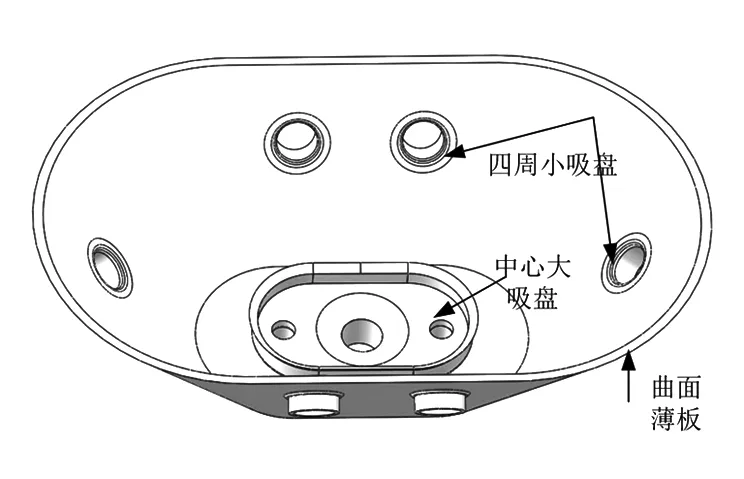
图5 吸附单元
2.3 吸附手缓冲单元设计
在微控制器下达吸附下颌指令后,机械臂带动下颌吸附手朝向颏隆凸处移动。在此运动中,机械臂存在设计、制造和控制系统等方面的误差[8],这些误差一定程度上增加了吸附单元误触下颌的几率,为了避免这种情况的发生,本文设计一种带有缓冲的伸缩机构,伸缩机构如图6所示。
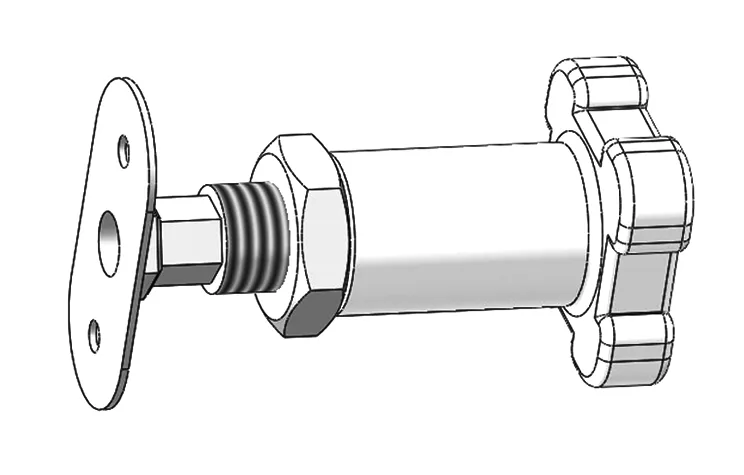
(a)伸缩机构外观
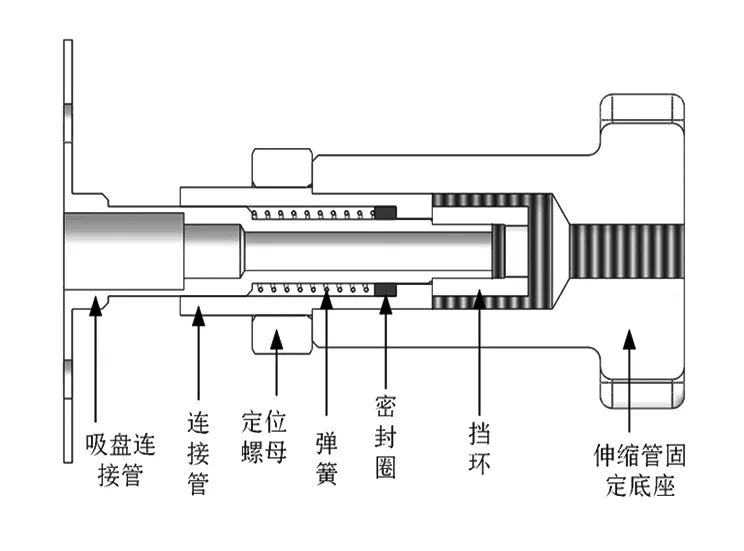
(b)伸缩机构内部
2.4 吸附手力探测单元设计
在下颌吸附手吸附颏隆凸过程中,为了满足吸附单元与颏隆凸紧密贴合的要求,需要感知吸附单元与颏隆凸间接触程度;在下颌吸附手牵引下颌运动阶段,为了确保下颌稳定打开以及下颌运动到最大开口态,需要感知下颌的运动状态。在满足上述需求上,为了使下颌吸附手的结构更紧凑,本文基于十字梁式结构设计出所需的多维力传感器,其结构如图7所示。A1A'1,B1B'1,C1C'1和D1D'1为弹性梁,E1E'1,F1F'1,G1G'1和H1H'1为浮动梁,弹性梁一端连接中心台,另一端与浮动梁连接,浮动梁两端连接固定端,在弹性梁上布置有横向和竖向工艺孔。中心台主要起到传递外部载荷给子梁的作用,弹性梁与浮动梁是突出外载荷作用下弹性体的应力和应变值。弹性体的主要尺寸如表 1所示。
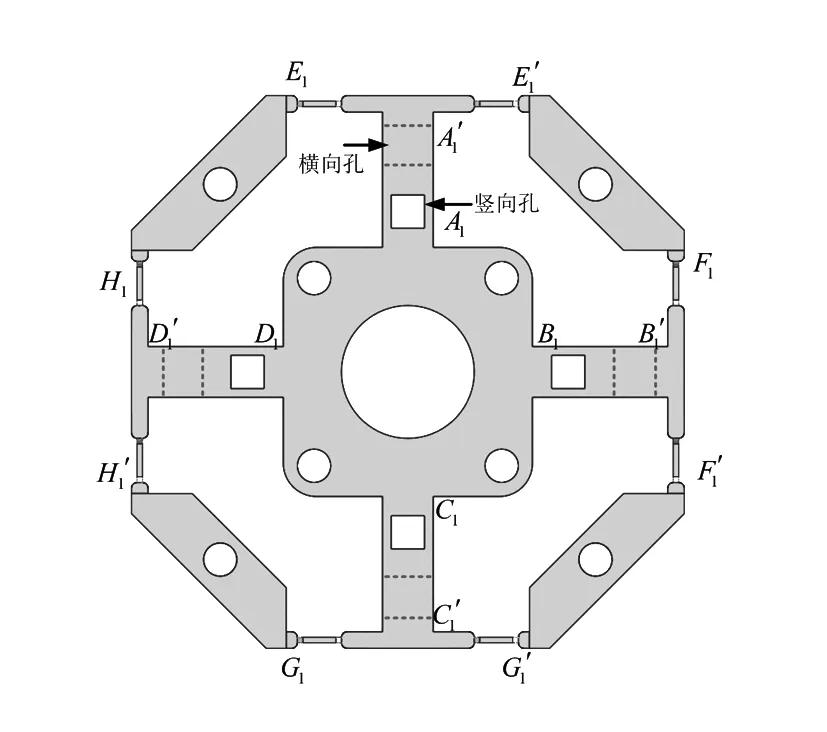
图7 弹性体结构

表1 弹性体主要尺寸 mm
3 弹性体优化分析
随着机器人在医疗领域的快速发展,对机器人各项指标提出了更高的要求,其中对机器人感知外部环境的能力更为关注。在多维力传感器中,十字梁式结构体具有结构紧凑简单、较强的抗弯矩能力等特点,但其Z灵敏度较低[9]。本文将在十字梁式弹性体结构上通过挖孔的形式来提高传感器Z轴的灵敏度。通过分析3种孔型对弹性梁Z轴应变的影响,并用Ansys软件验证理论分析,最后选取需要的孔型。弹性体采用LY12铝合金材料,材料属性如表2所示[10]。
表2 弹性体材料属性
3.1 工艺孔对弹性梁应变影响
应变式传感器的设计方法一般都是基于经验设计的。在十字梁式传感器设计中,十字梁式弹性体本身就是一个复杂的零件,再在其子梁上布置工艺孔使其结构更为复杂,理论分析其应力应变特性难度更大。为了更好地理论分析带有工艺孔的十字梁式传感器,对弹性体模型做一下简化:在应变式传感器设计过程中,只要传感器的灵敏度满足工作要求,就会尽可能增大传感器的刚度,因此传感器弹性体的应变数值是在微应变级别。根据弹性体应变很小的特性,把中心台视为刚体,弹性体中的子梁等效为悬臂梁。由于十字梁式传感器弹性体是对称结构,只要研究某一个子梁的应力应变即可。图8为带有工艺孔的悬臂梁受力图,图8(a)~(d)分别表示为带有方孔的悬臂梁、带有腰孔的悬臂梁、带有圆孔的悬臂梁和有孔处和无孔处的悬臂梁截面。根据弹性力学理论,杆件结构突变程度越大应力集中程度越高,为了更好地通过理论分析的方法来研究不同孔对弹性梁应变的影响,假设不同孔型应力集中程度一样,然后探究不同孔对弹性梁应变的影响。
(a) (b)
(c) (d)
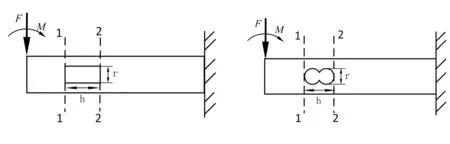
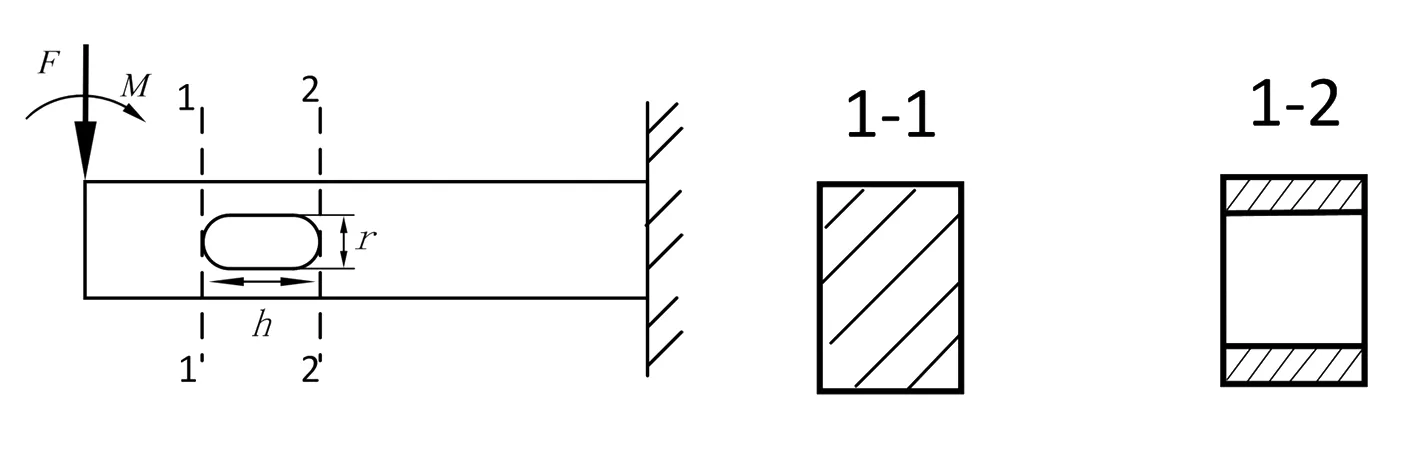
通过理论分析可以发现F和M作用时,弹性梁是发生弯曲变形。为了找出不同孔型对梁上应变影响的区别,对弹性梁打孔区域进行抽象出一个通用的受力模型,如图9(a)所示,其截面如9(b)所示。在9(a)图中,在原点O处施加了力F和力偶矩M,弹性梁下边缘孔曲线函数为z(x),假设弹性梁左端是自由端,右端为约束端。由于弹性梁的截面是变化的,将导致其惯性矩和中性面也是变化的,为了更好地分析弹性梁的应变变化,采用有限元的思想,将弹性梁分成n等份,分别列出每段的应变等式,总结变化规律[11]。
第一段截面的应变为:
ε0=εF0+εM0
(1)
第二段截面的应变为:
ε1=εF1+εM1
(2)
第三段截面的应变为:
ε2=εF2+εM2
(3)
第n段截面的应变为:
εn=εFn+εMn
(4)
假设弹性梁尺寸和材料属性一样,从上述推导可以看出,力作用下悬臂梁应变与孔函数Z(x)及力作用点到固定端的距离两者相关,悬臂梁孔附近的最大应变关系:εfang>εyuan=εyao;力偶矩M作用下,悬臂梁应变仅与孔函数Z(x)有关,悬臂梁上不同孔的最大应变关系:εfang=εyuan=εyao。通过Ansys 软件分析悬臂梁孔周围应变,结果如图10 所示,其中方孔、腰孔和圆孔的最大应变值如表3所示。理论分析与有限元仿真结果基本一致,验证了理论分析的可行性。
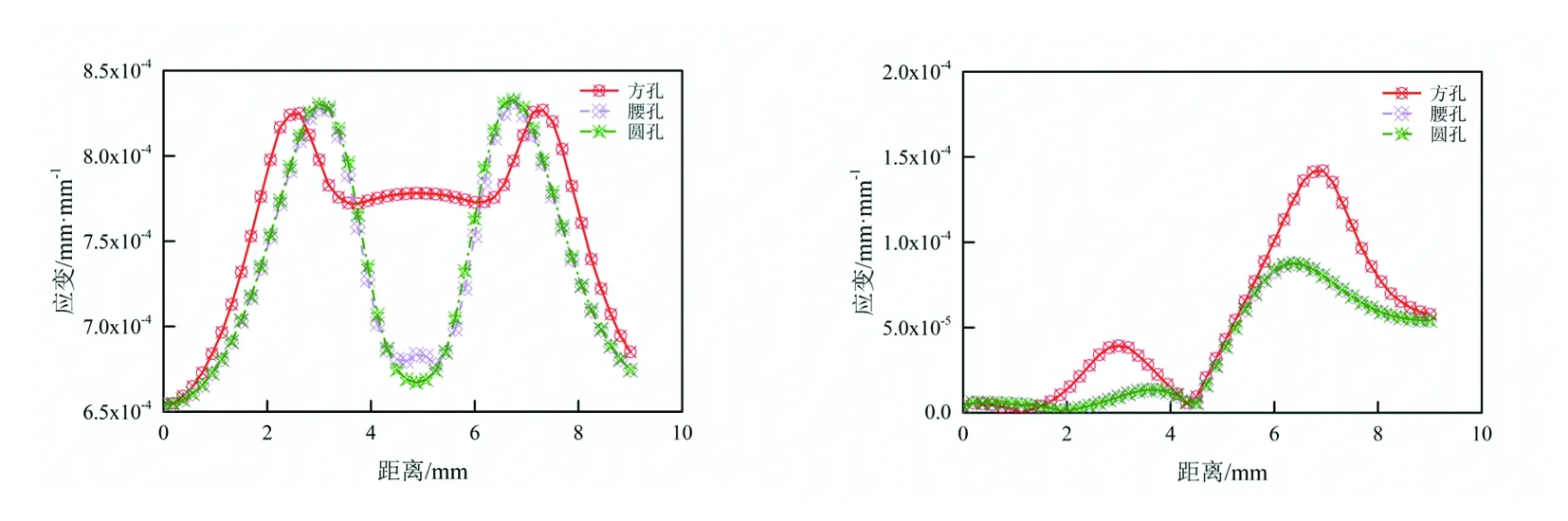
(a)M=0.9 N·m (b)F=7.5 N
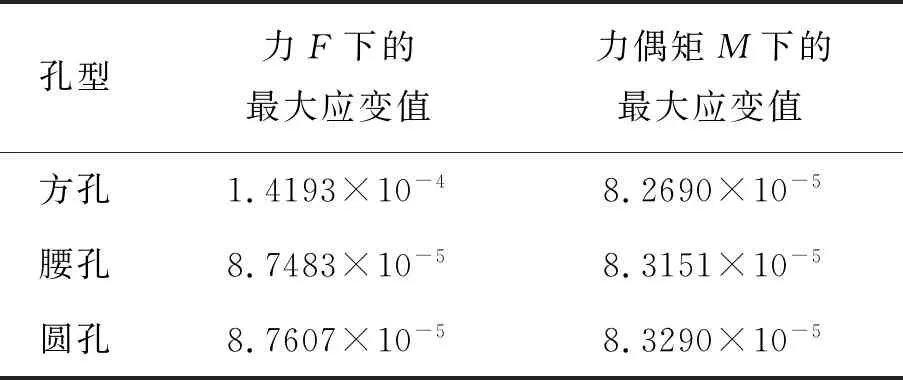
表3 F和M作用下悬臂梁孔附近的最大应变值
为了更好地验证悬臂梁代替弹性梁来讨论不同孔最大应变关系的合理性,在Ansys软件中分析力FZ和力偶矩MZ作用下的十字梁式弹性体工艺孔附近的应变结果(见图11)。通过图10和图11的对比,可以发现两图的曲线变化有一定区别,但两图的变化趋势大体相同,都表明了矩形孔在放大梁局部的应变能力比较显著,腰孔和圆孔在提高局部应变方面,相差不是很明显,这样进一步证实了上述理论分析结果的可行性。从不同孔的弹性体和悬臂梁的距离-应变图还可以看出在孔的两端都具有较高的应变值,是应变片贴敷的合理位置。
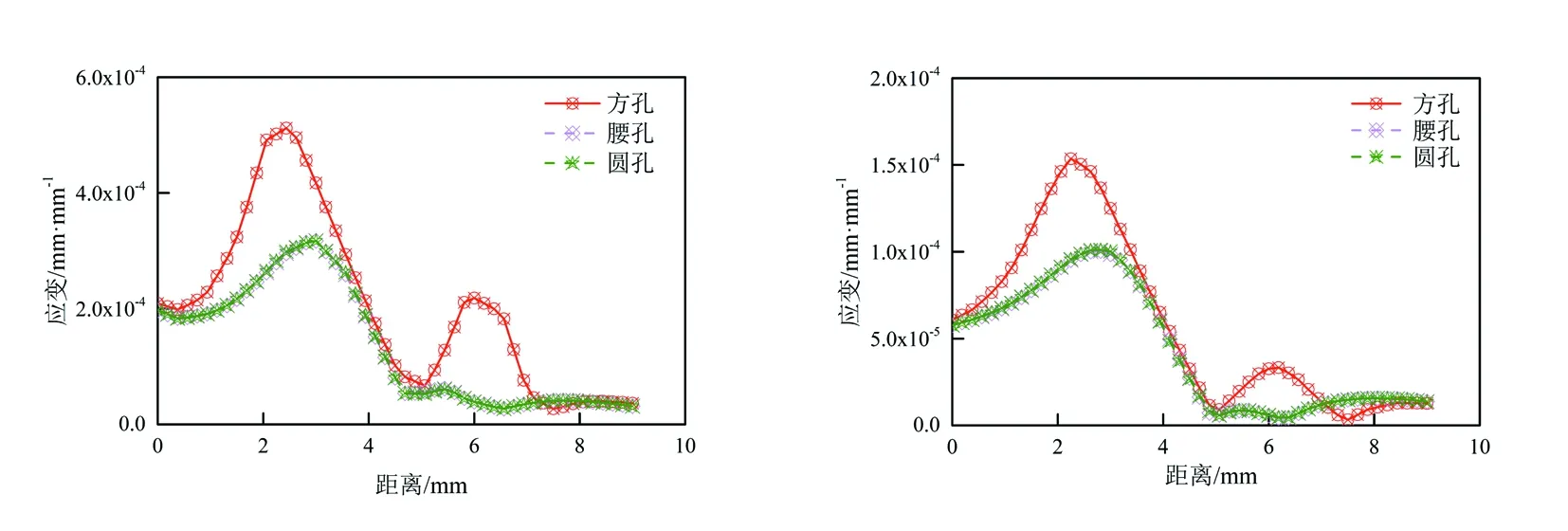
(a)MZ=1.8 N·m (b)FZ=30 N
3.2 弹性体有限元分析
通过图11中弹性梁的距离-应变曲线,确定力十字梁式弹性体弹性梁上布置的工艺孔为方孔,横向孔增大力FZ作用下的应变,竖向孔增大MZ作用下的应变。通过Ansys软件分析十字梁式弹性体的应变情况,弹性体分别受到满量程的单维力Fx=-30 N、FZ=-30 N、Mx=1.8 N·m与Mz=1.8 N·m时的应变分布云图如图12所示。
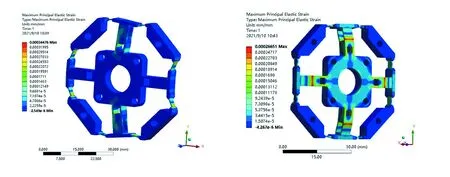
(a)Fx=-30 N (b)FZ=-30 N
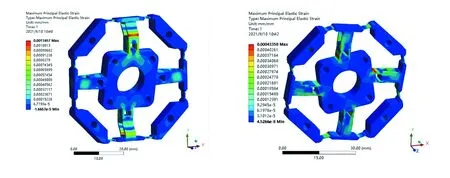
(c)Mx=1.8 N·m (d)MZ=1.8 N·m
3.3 应变片贴敷位置
根据弹性体的设计思路以及仿真结果,其表面上一共需要粘贴40个应变片。弹性体的浮动梁贴有应变片,用来测量Fx和Fy;弹性梁上下表面贴有应变片,用来测量Fz,Mx和My;弹性梁侧面贴有应变片,用来测量Mz。通过弹性梁的距离-应变图,给出应变片的合理贴敷位置以及电桥电路(见图13)。
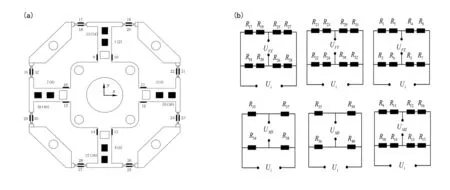
图13 应变贴敷位置(a)及电桥电路(b)
4 结论
本研究针对机器人气管插管前的口腔自主打开需求,设计了一款带有吸附、缓冲、力探测的吸附手。该吸附手的吸附单元能够稳定下颌受力,缓冲单元可以保护下颌组织,力探测单元能够感知下颌运动状态。在力探测单元设计过程中,为提高传感器Z轴探测力的灵敏度,采用布置工艺孔的方法,调整其刚度,并运用有限元仿真分析弹性体应变,验证了弹性体结构的合理性和功能的可行性,并给出应变片贴敷位置。设计的下颌吸附手结构简单、易于安装、价格低廉,在机器人气管插管方面具有良好的应用前景。