基于RTLAB仿真平台的新能源机组硬件在环仿真
2022-03-27江克证
胡 畔,曹 侃,叶 畅,江克证
(国网湖北省电力有限公司电力科学研究院,湖北 武汉 430072)
0 引言
近年来,湖北省新能源发展迅速。十四五期间预计将会爆发式增长。新能源的随机性和波动性导致部分地区电网运行控制及新能源消纳压力较大。传统机电暂态的仿真技术通常基于基波相量的准稳态模型,步长一般在ms级[1],主要关注电力系统在经受大扰动及小扰动后系统的稳定性,因此往往只能关注系统在工频及其附近范围的动态稳定性[2]。对于电力电子毫米级及微秒级的过程,机电暂态仿真难以满足,需要基于电磁暂态仿真技术开展系统研究。
光伏逆变器、风电变流器等作为新能源电站的核心部件,如何对其电网适应性,故障穿越性能和保护性能进行有效检测、督促主流厂家技术整改落实到位,成为保证新能源电站安全稳定并网的关键措施[4-6]。然而目前针对新能源控制系统测试的传统实现方式是在现场搭建真实设备,或在实验室建立电力测试台架或全套测试系统上进行。虽然这种方法能够保证测试的准确性,但同时存在造价昂贵,效率低和有潜在危险的缺点[7-8]。近年来,基于实时分布式仿真测试技术,如RTDS、RTLAB、ADPSS 得到了广泛的应用[3]。硬件在环HIL(hardware in loop)技术能够替代这种传统测试方法提供解决方案[9-11]。在HIL 仿真中,使用物理仿真模型来替代真实的电力设备,实时运行在仿真机上,此仿真机配备了与控制器系统和其他系统连接的输入与输出(IO)接口装置。HIL仿真器通过建立物理仿真模型就可以模拟出被测对象传感器和执行器动态特性,实现复杂的闭环测试,则不需要在真实系统上测试[12]。硬件在环(HIL)基于仿真器通过计算模拟电力系统一次部分实时地将控制保护装置需要的电压、电流量通过物理接口和功率放大器发送给控制保护装置,同时采集控制保护装置返回的控制信号,进而影响被仿真系统的运行,从而形成闭环,全面检验控制装置动作特性及其动作方式对所在系统的影响[13]。中国电科院、冀北电科院、海军工程大学等科研机构的青睐,该技术被广泛应用于张北示范工程、渝鄂背靠背直流输电工程[14-15]。
针对此,本文提出了一种基于RTLAB仿真平台的新能源机组硬件在环仿真技术,建立了两类新能源机组硬件在环仿真平台,提出了新能源机组硬件在环仿真实施步骤。基于湖北随州某新能源电站的机组开展了硬件在环实际仿真工作,证明了本文所提出的硬件在环仿真方法的有效性。
1 主要方案及步骤
1.1 总体架构及步骤
如引言所述,常见的实时分布式硬件在环技术主要包含RTDS、RTLAB、ADPSS。RT-LAB 优势在于电力电子在电力系统中的应用,新能源模型丰富,接口扩展性强,对第三方兼容性好,小步长仿真技术领先,适合新能源仿真与测试;RTDS优势在常规电力系统中的应用,但劣势在于不擅长电力电子小步长仿真,且系统封闭性,对第三方软硬件兼容差;ADPSS优势在大规模机电暂态仿真分析,但新能源模型不够丰富,接口兼容性和扩展性较差,所以更适合做大电网的机电暂态全数字仿真,比如电网运行分析,不适合做新能源检测平台或者功率级测试。以RTDS 与RTLAB 为例,主要仿真特点及应用场合对比如表1。
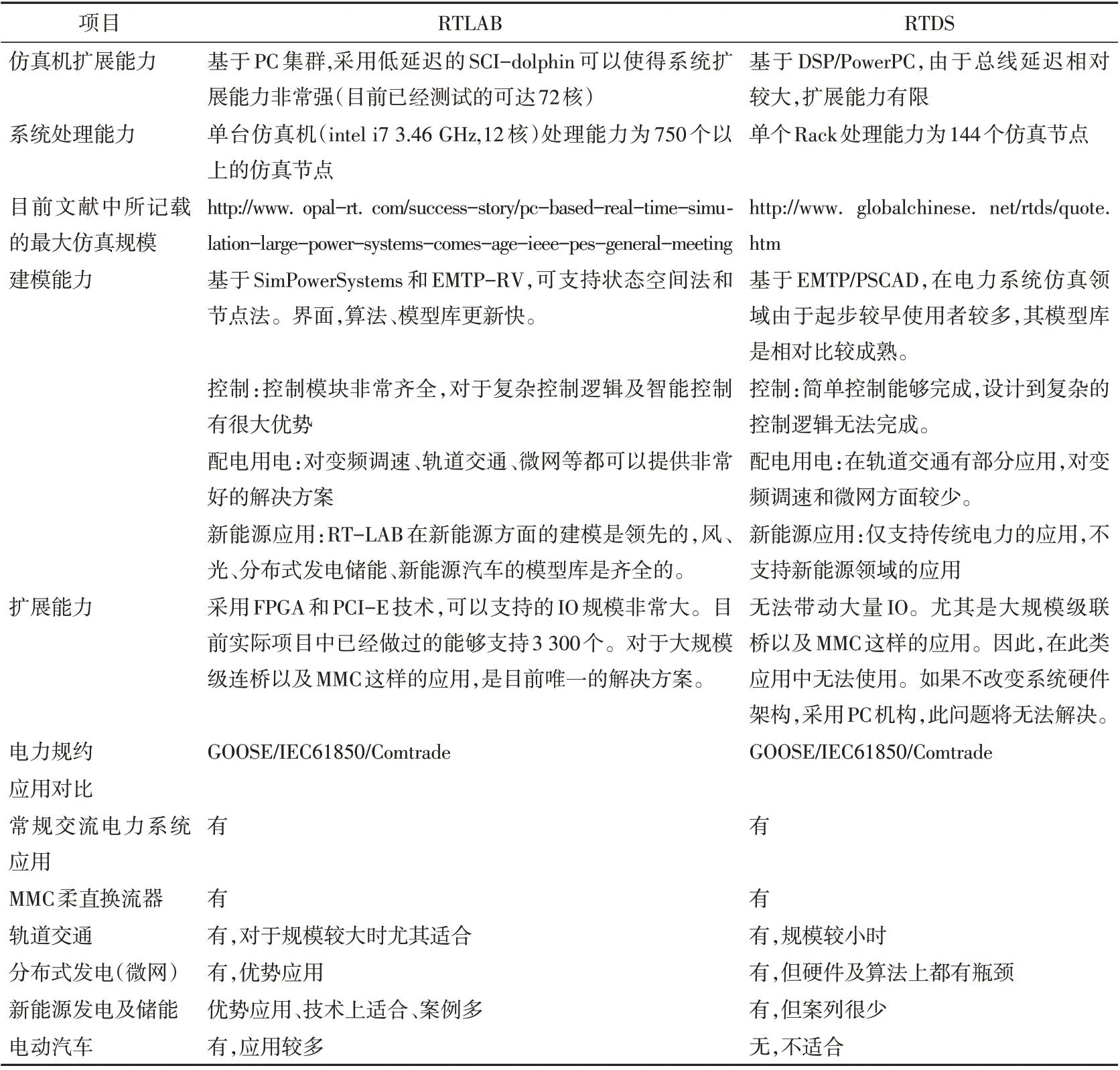
表1 RTDS与RTLAB仿真特点对比表Table 1 Simulation characteristics comparison of RTDS and RTLAB
基于RT-LAB的新能源硬件在环测试平台包含硬件部分和软件部分。硬件部分主要由上位机和实时仿真机组成。系统采用开放架构,基于标准总线和工业用实时RedHat Linux 操作系统,系统软硬件均具有升级和扩充能力,支持第三方多种板卡扩充。本系统为分布式系统,模块化设计,在满足用户技术要求的基础上,具有良好的灵活性和扩展性,可进行软硬件的扩展,可满足包括仿真规模的扩展、功能上的扩展、硬件I/O数量和各种总线类型的扩容等。
软件部分采用分布式实时仿真管理软件。软件部分具有模型开发、编译、自动代码生成、自动代码下载、仿真执行、参数在线调整、上位机与仿真机通讯、仿真机内CPU之间实时通讯、仿真数据的实时存储和回放等功能。
该硬件在环测试平台由3 部分组成,分别是试验管理分系统、实时仿真分系统和信号接口分系统,其系统原理图如图1所示。

图1 基于RT-LAB硬件在环测试平台原理图Fig.1 Schematic diagram of RT-LAB-based hardware-based in-the-loop test platform
试验管理分系统是上位机系统,具有模型开发、试验管理、自动测试和图形监控等功能。
实时仿真分系统是下位机系统,是整个系统的核心部分,包括1台RT-LAB OP5700实时仿真器(单台8核Intel Xeon E5 处理器,主频3.2 GHz,Xilinx Virtex-7 FPGA板卡,时钟200 MHz,16个SFP接口,8个高速I/O插槽、6个PCI/PCIe插槽),可以放置PCI或PCIe接口的第三方I/O板卡。),需要具备系统数学模型实时运行以及实时I/O端口配置等功能,其中三相交流系统的主电路模型放在OP5700 的CPU 中运行,而电力电子装置模型(也就是控制器的被控对象)放在OP5700 的CPU(步长<25 µs)或OP5700 的FPGA(步长<1 µs)中运行(其数据通过PCIe 总线交互),一般当仿真规模不大,步长要求不是很高的情况下CPU 模型的解决方案就能够满足需求。
信号接口分系统需要具备与装置的控制柜、智能光纤接口箱和功率放大器等实物的物理连接等功能。一方面从I/O 输出的模拟量值输入到控制器中用于控制算法;另一方面,控制系统中的阀基控制器与仿真器还需要有智能光纤接口箱和高速光纤通讯,用来模拟真实的控制器与其被控对象之间的通讯环境。因此,基于RTLAB 仿真平台的新能源机组硬件在环数模混合仿真主要步骤如下:
1)依据实际新能源机组电气结构,建立三相交流系统的主电路模型,构建单元电气一次主电路;
2)根据控制信号逻辑、通讯要求,实现信号接口分系统与装置的控制柜、智能光纤接口箱和功率放大器等实物的物理连接;
3)设置试验典型工况并开展仿真性能测试。
1.2 新能源机组硬件在环仿真平台搭建
1.2.1 500 kW光伏电力电子一次模型
光伏发电单元的机电暂态模型包括光伏方阵和光伏逆变器,其中光伏逆变器采用实际控制保护设备,采用硬件在环方式研究其发电单元的并网特性。以某500 kW 的光伏并网设备为例,其硬件拓扑结构如图2所示。

图2 光伏自同步电压源一次模型Fig.2 Photovoltaic self-synchronous voltage source primary model
其一次部分主要由受控直流电压源、IGBT,滤波 电路构成,其中主要参数如表2。

表2 电路一次参数表Table 2 Circuit primary parameters
1.2.2 2 MW风机电力电子一次模型
风电机组一般由机侧原动部分及网侧换流部分构成。因此,在一次部分相对光伏机组更加复杂。以湖北广水某风电场的2.0 MW直驱式风机为例,风电机组采用双分裂绕组,配套2 台机侧变流器、2 套网侧变流器,其电气一次部分(包含永磁直驱原动机)及其主要参数如图3~图5所示。
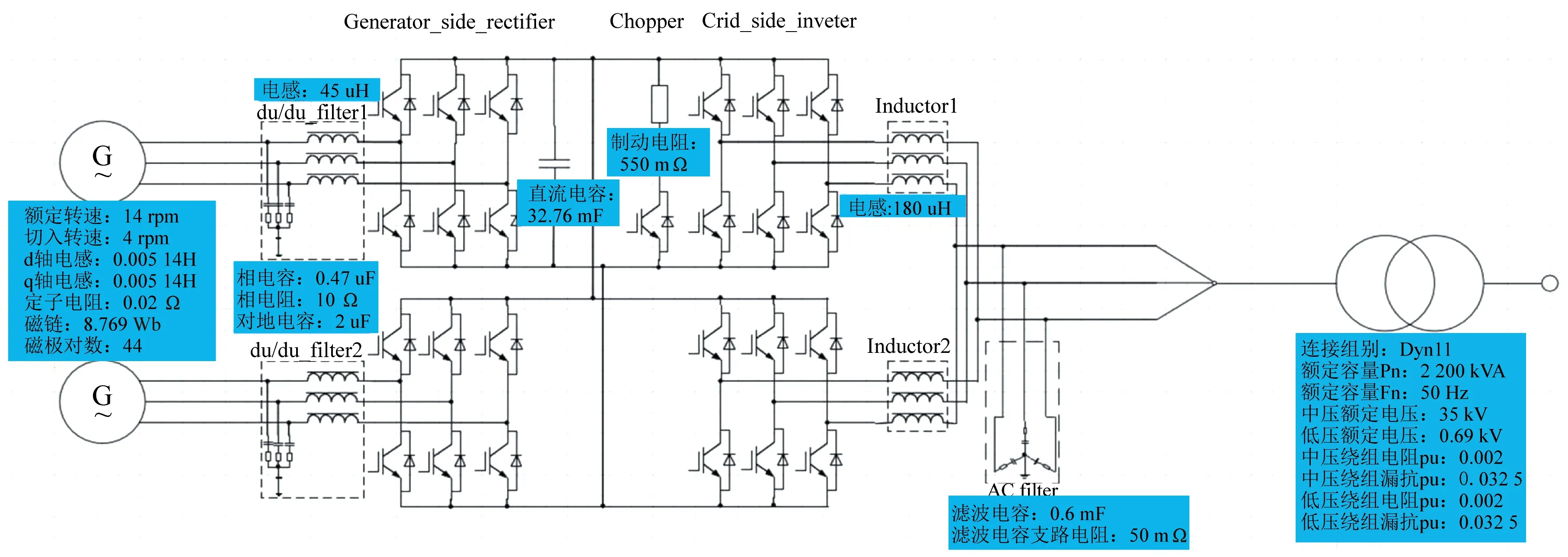
图3 某直驱式风机一次拓扑及其参数Fig.3 Primary topology of a direct-drive wind turbine and its parameters
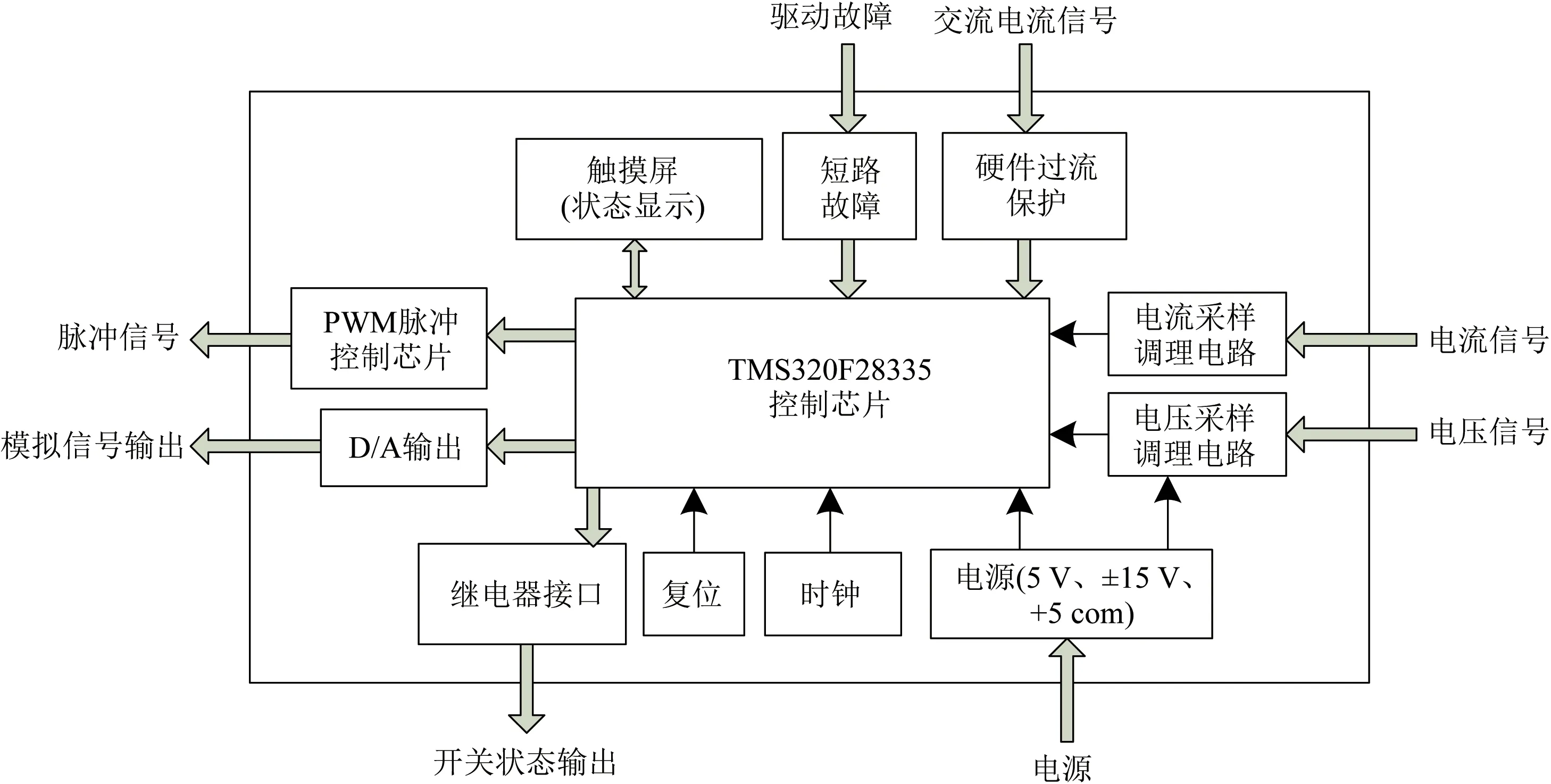
图4 实验平台控制系统硬件结构框图Fig.4 Block diagram of the hardware structure of experimental platform control system
图5 半实物仿真接线图Fig.5 Semi-physical simulation wiring diagram
2 仿真测试平台搭建
为验证电站现场使用的逆变器与型式试验样机并网性能一致,需开展逆变器控制器一致性核查。以光伏逆变器硬件在环仿真平台搭建为例,其仿真测试平台包含光伏逆变器并网测试一次回路(包含光伏阵列、直流源、并网检测装置)模型和光伏逆变器控制器两部分,两者通过半实物仿真器I/O 口相连接。在半实物仿真软件中对光伏逆变器并网测试一次回路进行建模,采样电压、电流等信号,并通过I/O 接口输出至DSP板(或转接板),DSP板(或转接板)输出PWM 波对逆变器控制器性能进行测试,测试平台架构图如图6所示。

图6 光伏硬件在环仿真测试平台架构图Fig.6 Photovoltaic hardware-in-the-loop simulation test platform
考虑到单纯采用DSP 控制板进行接线不方便,且涉及的通信部分半实物仿真器无法模拟,因此,半实物仿真测试,工程师通常需依据板件实际情况带主控板、接口板等进行测试。(提供的信号为物理信号,接口电平范围为±16 V),通过R485 进行通讯连接,并对应相应的模拟量与信息量数据,其DSP及转接板与RTLAB通讯接口如表3。
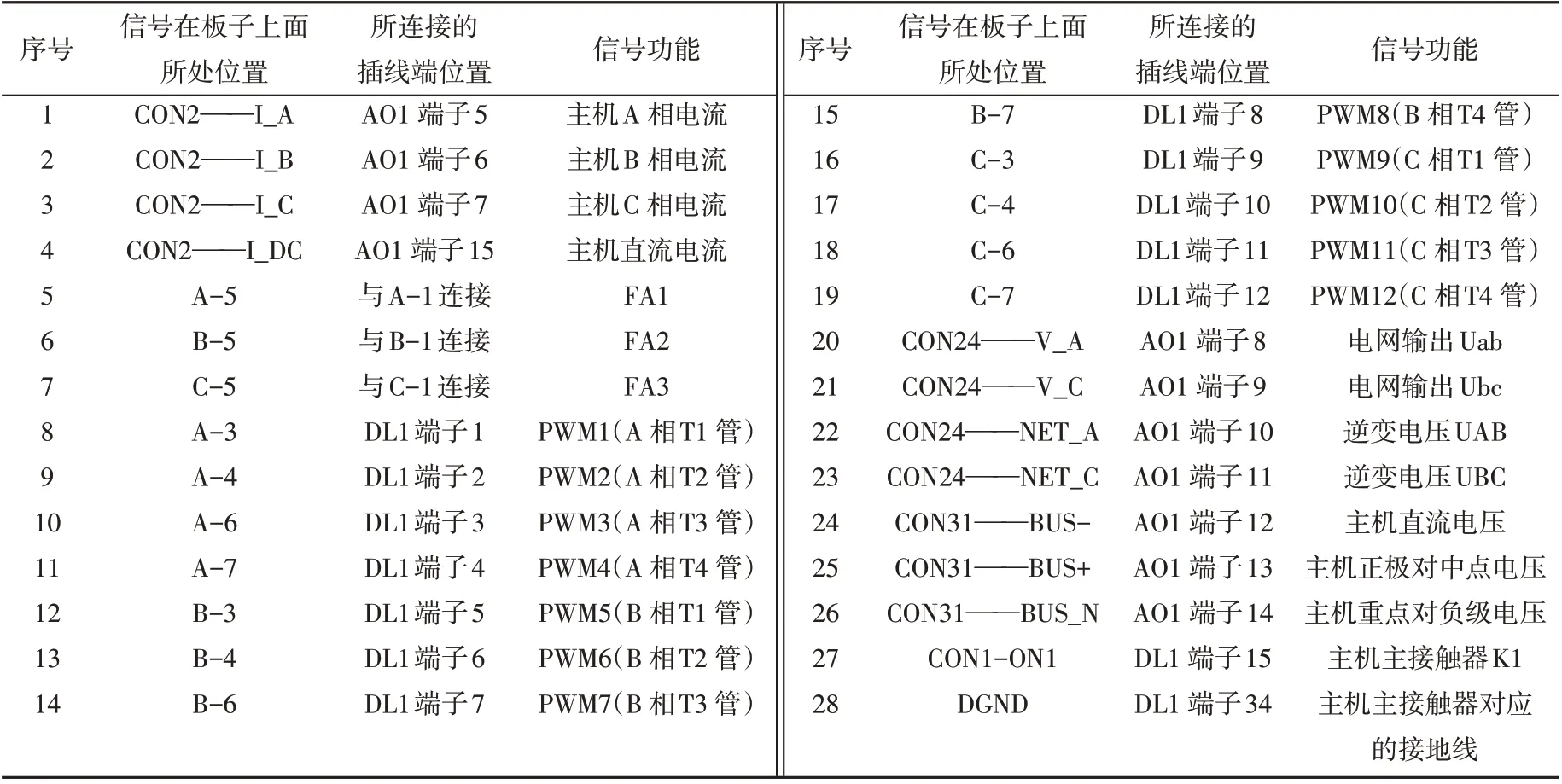
表3 光伏逆变器与RTLAB接口通讯点表Table 3 Interface communication information between photovoltaic inverter and RTLAB
3 实例验证
为验证本文所提出的基于RTLAB 硬件在环仿真技术的有效性,针对图2及表3所示的光伏逆变器自同步电压源控制型逆变器,进行并网特性仿真模拟测试,测试参数及接口与前文一致,采用FPGA 进行精确仿真,仿真步长为20 µs,主要对该控制器是否具备故障穿越、一次调频、惯量支撑等功能进行验证。主要工况包括:高低穿工况、一次调频、转动惯量、MPPT 测试、运行模式切换、功率控制能力测试。
1)连续高低穿测试
按照《GB/T 19964-2012 光伏发电站接入电力系统技术规定》的要求,光伏并网逆变器需要具备高、低穿能力,结合实际工程需要,设置较为严苛的连续高低穿测试工况,如表4所示。图7中,电压由0.2Un-1.3Un,曲线x轴对应时间(ms),y轴对应标幺值,4条曲线分别为母线电压Un,有功功率P,d 轴电流Id(对应有功功率),d轴电流Iq(对应无功功率)。图8-图9与图7一致,仅电压变化范围不同,如表4所示。
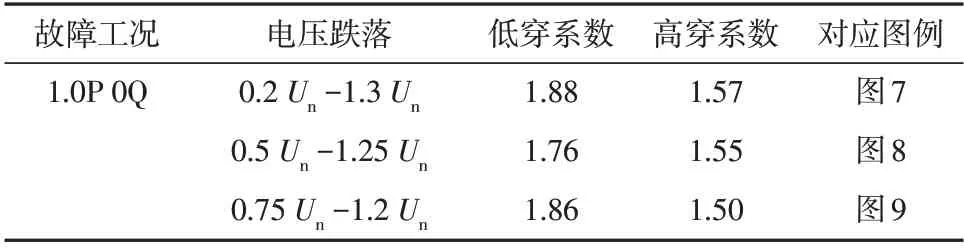
表4 连续高低穿测试工况设置Table 4 Operation setting for continuous high and low voltage ride-through test

图7 连续高低电压工况测试(0.2Un-1.3Un)Fig.7 Operation setting for continuous high and low voltage ride-through test(0.2Un-1.3Un)

图8 连续高低电压工况测试(0.5Un-1.25Un)Fig.8 Operation setting for continuous high and low voltage ride-through test(0.5Un-1.25Un)
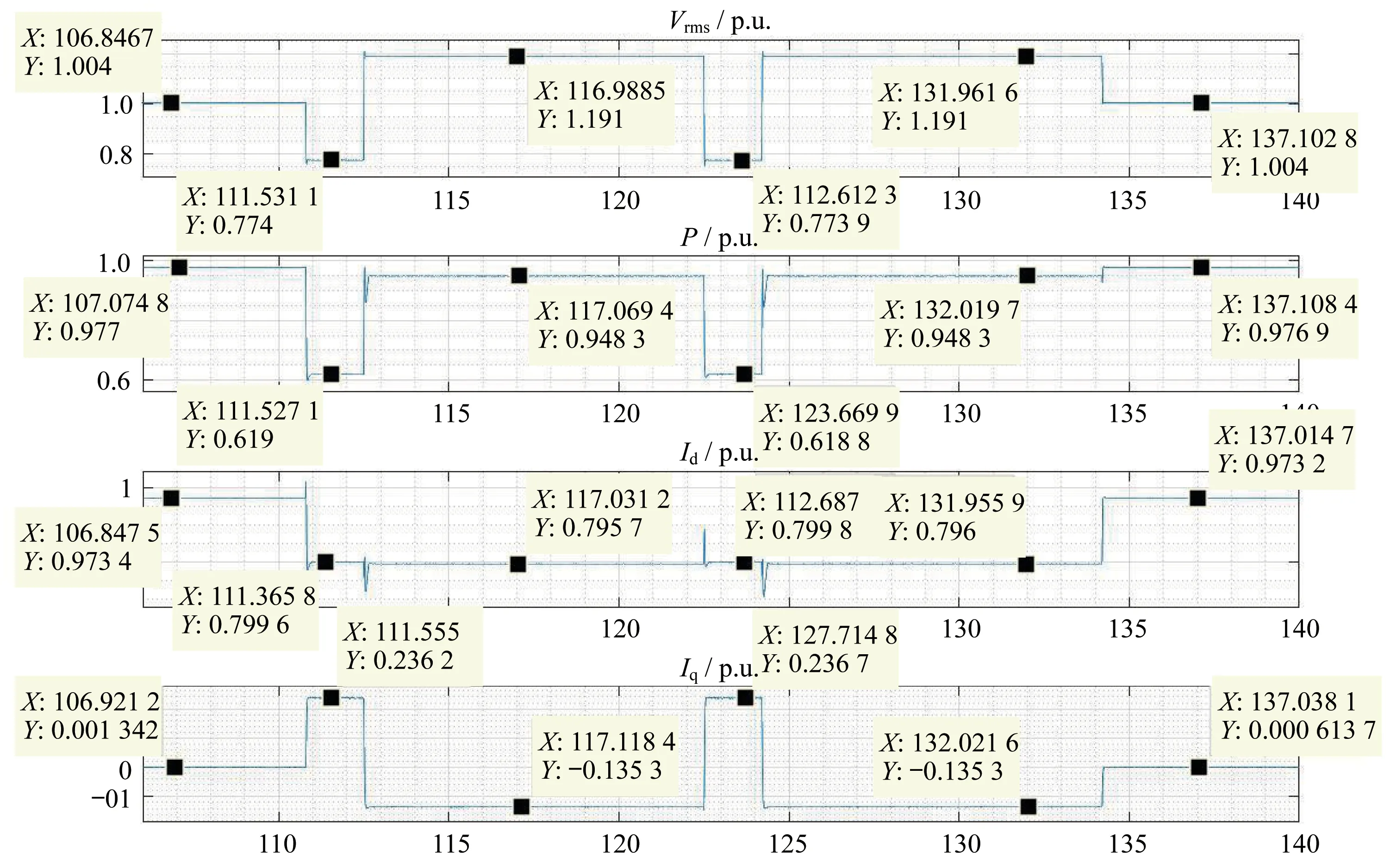
图9 连续高低电压工况测试(0.75Un-1.2Un)Fig.9 Operation setting for continuous high and low voltage ride-through test (0.75Un-1.2Un)
2)一次调频测试
按照GB/T 19964-2012 要求,设置光伏逆变器并网点频率波动范围为50.5 Hz~49.5 Hz,频率超过此范围后,功率维持不变。调频死区设置为±0.05 Hz,频率波动小于此范围时,功率维持不变。试验测试结果如图10所示,图中曲线x 轴对应时间(ms),曲线1中y 轴对应有功标幺值,曲线2中y为并网点频率f。

图10 一次调频测试Fig.10 Primary frequency modulation test results
3)转动惯量测试
按照《GB/T 19964-2012 光伏发电站接入电力系统技术规定》要求,设置频率由50 Hz阶跃变化至49.8 Hz。转动惯量由0.1 p.u.变化至0.2 p.u.,频率调节时间如图11所示,明显增加,图中曲线x轴对应时间(ms),曲线1中y轴对应有功标幺值,曲线2中y为并网点频率f。
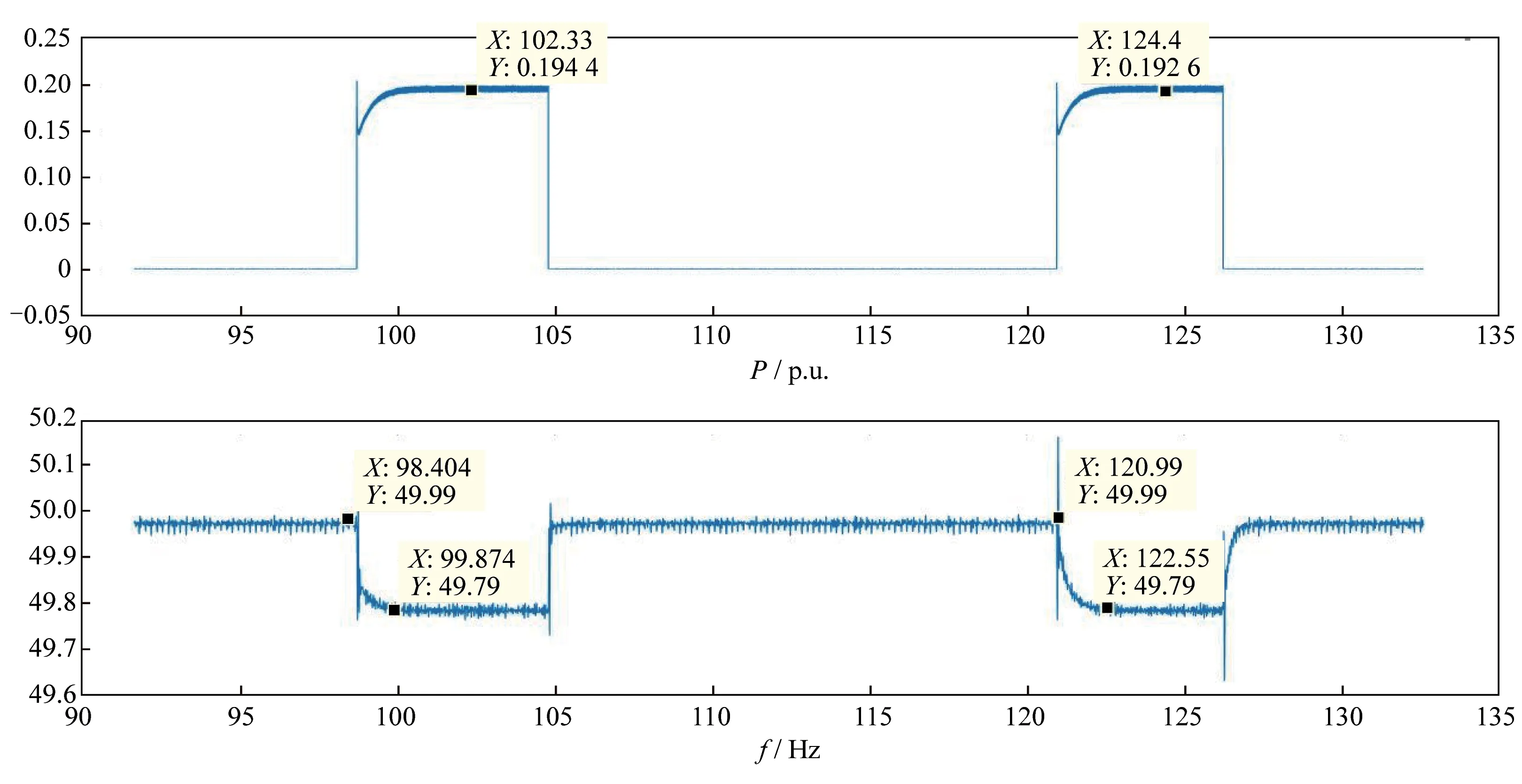
图11 转动惯量测试结果,Fig.11 Rotational inertia test results
4)MPPT控制能力测试
在电流源/电压源模式下,光照强度从200 勒克斯增加到1 000 勒克斯,再降回到200 勒克斯,检验输出功率能够追踪最大功率点,测试结果如图12及图13所示,图中曲线x 轴对应时间(ms),曲线1 中y 轴对应有功标幺值,曲线2中y为光照强度。

图12 电流源MPPT控制能力测试结果Fig.12 Current source MPPT control capability test results
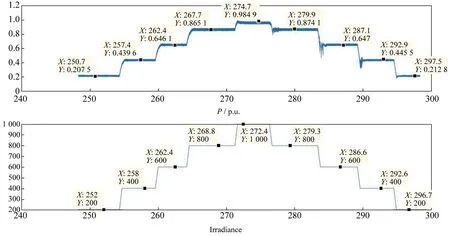
图13 电压源MPPT控制能力测试结果Fig.13 Voltage source MPPT control capability test results
5)电压/电流源模式切换控制测试
在电流源/电压源额定模式下,额定0.2 p.u.下开展模式切换功能测试,验证光伏逆变器稳定控制。结果如图14 及图15 所示。曲线x 轴对应时间(ms),y 轴对应标幺值,4 条曲线分别为母线电压Un,有功功率P,d轴电流Id(对应有功功率),d 轴电流Iq(对应无功功率)。

图14 电流源模式切换电压源Fig.14 Current-source switched to voltage-source
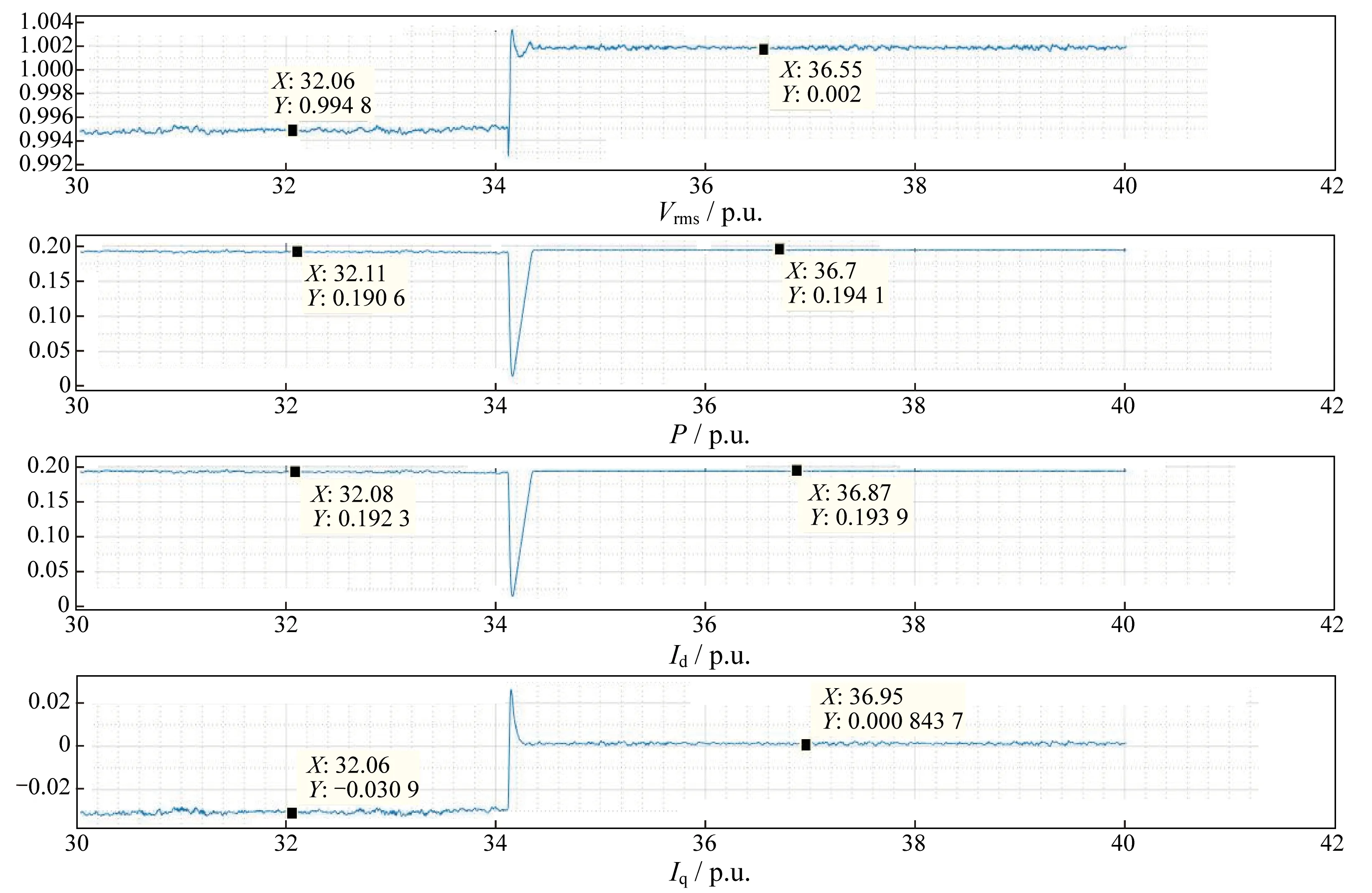
图15 电压源模式切换电流源Fig.15 Voltage-source mode switched to current-source
6)功率控制测试
设置逆变器的输出有功功率按指令从0.1Pn增加到0.8Pn,测试结果如图16。曲线x轴对应时间(ms),y轴对应标幺值,4条曲线分别为母线电压Un,有功功率P,d 轴电流Id(对应有功功率),d 轴电流Iq(对应无功功率)。
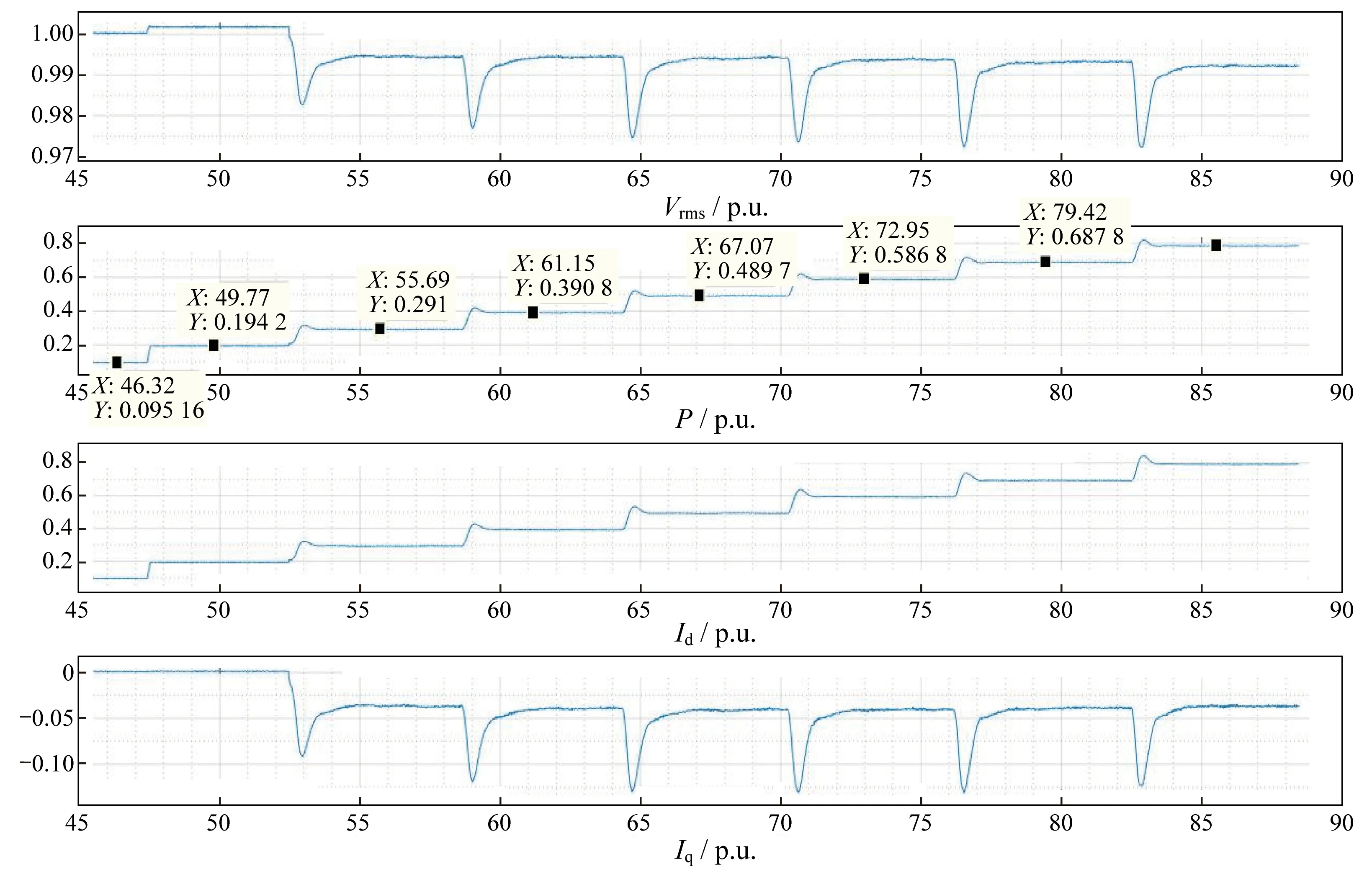
图16 有功功率控制能力测试Fig.16 Active power control capability test, curve x-axis corresponds to time (ms)
设置逆变器的输出无功功率按指令0 kvar、100 kvar、150 kvar、-50 kvar、-100 kvar、-150 kvar 输出。逆变器的输出无功功率直接受电网电压的实时调节,无功参考指令仅用作无功功率补偿,调节不同箱变下因参数差异导致的电网电压不一致所致的无功差值,结果如图17,曲线x轴对应时间(ms),y轴对应标幺值,4条曲线分别为母线电压Un,有功功率P,d轴电流Id(对应有功功率),d轴电流Iq(对应无功功率)。
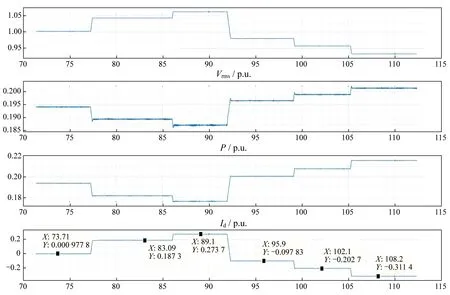
图17 无功功率控制能力测试Fig.17 Reactive power control capability test
经过上述测试,待测设备所有功能均满足相关设计和标准要求,通过本文所提出的硬件在环仿真平台可有效开展新能源单元的并网性能测试及试验,HIL测试验证了该控制器的有效性和优点。
4 结语
由于新能源机组大规模接入,电力系统呈现电力电子化趋势,亟需开展电磁暂态仿真。本文基于RTLAB仿真平台,提出了一种新能源机组硬件在环仿真步骤及方法,给出了典型光伏及风机一次ehs模型。基于某实际工程的光伏逆变器,开展了硬件在环仿真,实现了在实验室环境下完成对控制器的测试。结果表明,基于RTLAB 仿真平台可开展极限测试、故障测试及在实际的环境下费用高昂或不能开展的测试等,具有广阔的应用前景。
