民用无人机反制技术及应用场景分析*
2022-03-27伍瀚宇赵义欣
程 擎,伍瀚宇,吉 鹏,赵义欣,张 强
(中国民用航空飞行学院 空中交通管理学院,四川 广汉 618307)
0 引 言
近年来,随着无人机领域的迅猛发展,使用门槛不断降低,各式各样的民用级无人机进入大众消费市场。根据中国航空运输协会通航分会所公布的《2019中国民用无人机发展报告》,截至2019年底,实名登记无人机保有量达到了39.2万架。目前我国针对无人机管控出台了一系列规章制度,据2020年12月8日交通运输部发布的《交通运输部关于完善综合交通法规体系的意见》,“十四五”时期,将大力推动《民用航空法(修订)》《无人驾驶航空器飞行管理条例》的颁布实施。
但是当前的无人机行业规范建设未能跟上其发展速度,在尚未完善的无人机监管体系下,大量黑飞、操作不当引发的安全事故频频发生。“低慢小”民用无人机所占据的低空空域作为宝贵的战略资源[1],为保障低空空域的安全可靠,保障公众的人身安全与隐私权,随之衍生出了这一重要技术领域——无人机反制技术。
无人机反制技术主要通过人眼捕捉或监视设备锁定目标后,利用捕捉网、激光、声波、火力压制、无线电干扰等手段,对目标无人机进行捕捉、摧毁、控制等。当前,无人机反制技术在防范恐怖袭击,保护重要地点、重大活动现场,维护社会治安秩序上发挥着重要作用。
在无人机反制技术发展的同时,又有新的问题浮现出来。由于现有无人机反制技术千差万别,不同技术手段所具有的反制特性与反制效果不同,无法使用单一的反制手段应对不同的场景。因此,本文介绍了国内外无人机反制技术的发展现状,综述了当前主要的无人机反制技术手段,并针对不同的应用场景对不同反制手段逐一进行了分析。
1 无人机反制系统国内外发展现状
1.1 国外发展现状
根据全球性市场调查咨询公司Markets & Markets于2020年对无人机反制领域未来5年的发展趋势所做出的策略分析报告显示,全球的无人机反制技术市场将以近32.2%的速率增长,预计2025年,全球市场规模将达到24亿美元。
早在2012年,为有效应对无人机威胁,美国开始制定反无人机战略[2]。以美国Raytheon Technologies为首的美国企业围绕着无人机反制技术展开了大量的研究,其中项目包括“高功率微波武器”(High-Power Microwave Weapon,HPM)、“机动式高能激光系统”(High Energy Laser System,HEL)、搭载有搜索设备与攻击武器的“Coyote UAS”以及配备接近引线的“Stinger Missile”。美国Boeing公司研制有搭配高灵敏度传感器的“紧凑型激光武器系统”(Compact Laser Weapon System,CLWS)。美国空军研究实验室和Epirus分别研制有微波武器“战术高功率微波作战响应器”(Tactical High-Power Microwave Operational Responder,THOR)和“Leonidas”。美国Battelle与IXI EW分别推出了枪式反无人机武器“DroneDefender”与“Dronekiller”。
2015年,英国针对非法使用无人机所可能带来的恐怖袭击、携带危险品、侵犯隐私发布了代号为COI4的反无人机信息中心项目。Blighter Surveillance Systems、Chess Dynamics、Enterprise Control Systems三家公司联合研制了集成雷达、红外摄像头、多频无线射频压制器的“反无人机防御系统”(Anti-UAV Defence System,AUDS)。英国Open Works Engineering推出了搭配有压缩空气发射器和智能捕网弹丸的“SkyWall-100”以及集成光电系统能够识别、跟踪目标的自动化武器“SkyWall Auto”。
在俄罗斯国家技术集团 Rostec领导下,其旗下多家公司也进行了相关研究,其中NPP Almaz与Avtomatika分别推出了基于无线电干扰的反制武器“Ataka-DBS”和 “Sapsan-Bekas”。
法国Thales Group研发了一套集成雷达、声像探测器以及无线电干扰与欺骗的无人机反制装备。法国CILAS推出了反无人机激光武器系统“HELLAS-P”。
以色列航宇工业公司(Israel Aerospace Industries,IAI)与Iron Drone研制了集成雷达、光电与无线电干扰设备的无人机反制系统“无人机卫士”(DroneGuard)。同时,以色列Rafael Advanced Defense Systems也推出了“无人机穹”(DroneDome),同样集成了监视雷达、光电系统与宽频信号干扰器。以色列智能射手公司(SMART SHOOTER)研制有轻武器火控系统“SMASH”。
意大利芬梅卡尼卡集团SelexES公司研制了集成雷达、光电、麦克风以及无线电信号欺骗的“猎鹰盾”无人机防御系统。
加拿大AerialX公司推出了通过动能杀伤无人机的“无人机子弹”(DroneBullet)。
新加坡的TRD新加坡公司推出了便携式的反无人机系统“Orion H+”,可对六种无线电频率实施干扰。
由法宇航、德国Dornier和DASA、西班牙CASA组成的欧洲宇航防务集团推出了一款集成雷达、红外相机、定向仪的无人机反制设备。表1给出了国外具有代表性的反制项目以及作用原理说明。
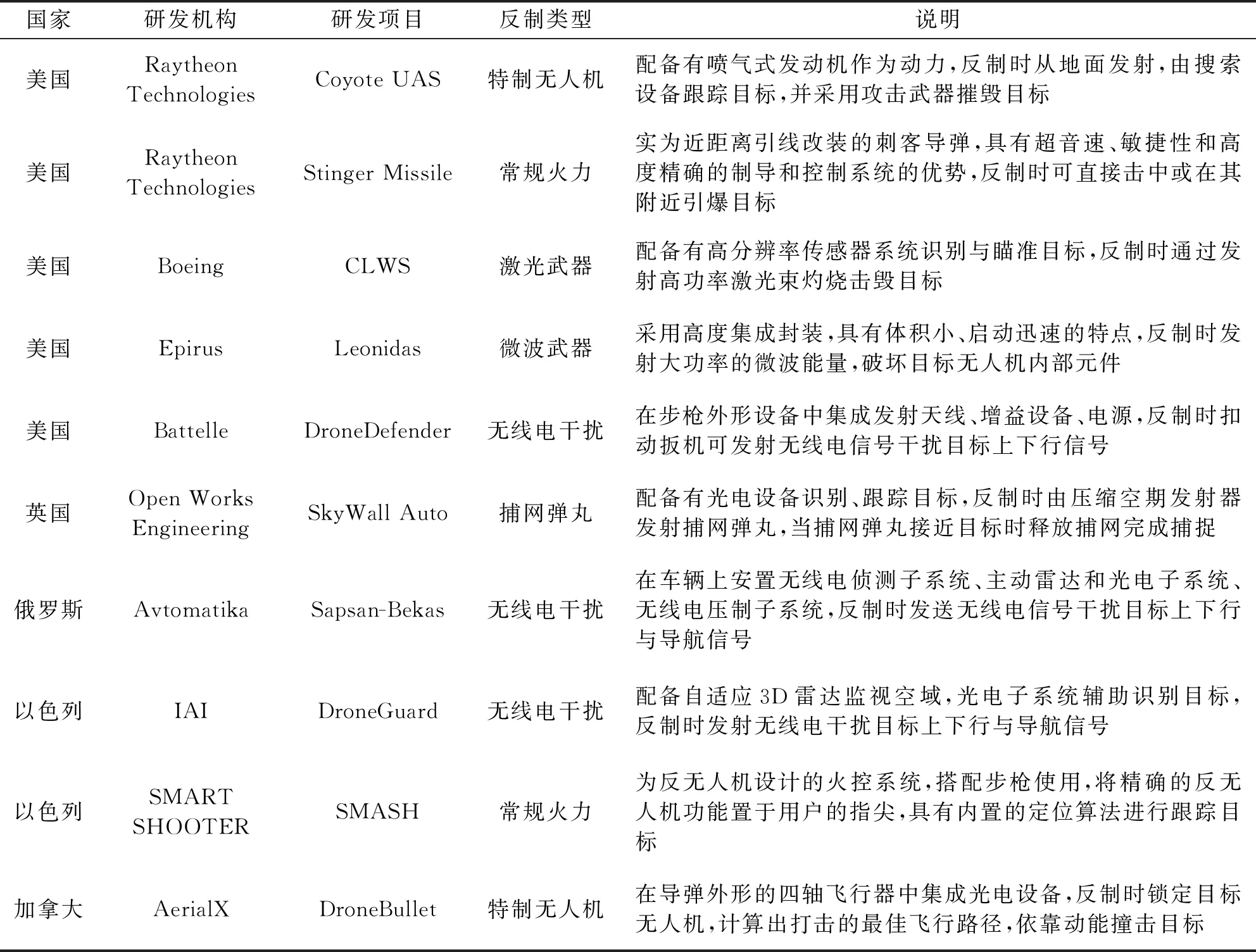
表1 国外无人机反制系统项目
1.2 国内发展现状
近年来,我国在无人机反制领域也在不断地摸索。2016年,“北斗”开放实验室发布了由其研发的国内首套诱骗式民用无人机反制系统ADS2000。该系统可通过干扰、压制、欺骗手段实现对无人机防护区域的保护。
2017年,青岛国数信息科技有限公司推出了一套无人机反制方案。该方案通过收集空域音频信息与数据库中数据进行对比,然后利用高清成像设备进行搜索识别,确认目标之后由JAM系列电磁压制武器干扰目标信号并发射16 m2捕捉网将其捕获,最后接入被捕无人机飞行控制单元获取起飞位置,实现溯源目的。
同年,在全球创新创业交易会上,成都电科智达科技有限公司作为高新科技创新企业代表展示了无人机反制设备“Z”系统。该设备采用小型化雷达光电复合传感技术与高频宽带干扰技术,能快速有效发现、识别和拦截低空小型无人机。
2018年,在珠海航展上中国航天科工二院207所展出了“低空守卫者”无人机反制系统。该系统包括雷达监视、无线电侦测、光电跟踪识别以及无线电干扰与欺骗。
2020年,在第四届世界无人机大会暨第五届深圳国际无人机展览会上,上海特金无线技术有限公司发布首个城市级网格化无人机管控系统。该无人机反制系统利用频谱大数据AI分析弱信号和调频信号侦测,多目标识别分离(非)合作目标区分,由到达时间差(Time Difference of Arrival,TDOA)技术结合网格化进行目标位置确定,最后由定向干扰拦截设备进行反制。
当前,无人机与无人机反制技术正呈现出博弈式发展,“低慢小”民用无人机享受着时代红利,抗干扰技术、避障技术不断发展,为无人机的处置提出了新的难题。国外在无人机管控领域起步早,特别是在无人机管理的上层结构以及无人机云系统的发展上,如美国LANNC系统、欧洲U-space系统。但是无人机反制技术正处于瓶颈阶段,还未曾出现一种行之有效且无附带损伤的技术手段,并且无人机反制技术属于融合学科的应用技术,在各技术领域未有突破性进展前很难有较大改观。当前,国内外的反制设备研制进展受限于目前的主流方法,各研究机构成果主要集中于对现有方向进行改进。据专利统计[3],自2016年开始我国反制领域专利数量快速上升,达到年申请量85件,2017年达到175件,并成逐年上升趋势,其中四川、广东、北京地区最为活跃,并且已经涉及到当前无人机反制技术的所有主流方法。近年来国防科技创新特区主办的“无形截击”无人机与反无人机对抗挑战赛也体现出我国无人机反制技术的稳步发展。笔者认为当前应当紧跟无人机反制的需求趋势,联合高校、研究所、企业、应用单位,利用各自的科技资源、产业资源,立足于现有技术基础,攻克关键技术难题,探索新型反制技术方法。
2 无人机反制的主要方法
无人机反制技术即为保护重要人物、重要区域、重要空域,对非法入侵的无人机进行控制的技术[4]。全球无人机反制领域发展到如今,已有众多基于不同原理的反制技术,根据其作用形式的不同,可以分为捕获技术、摧毁技术、信号干扰技术、信号欺骗技术四类。
2.1 捕获技术
捕获技术即通过一定的手段,在避免对目标无人机造成损害的情况下,进行捕捉,并可对其进行破解、分析、研究。捕获手段主要分为三种,分别为驯服动物捕获无人机、发射捕网弹丸、无人机挂载捕网。
2.1.1 驯服动物
驯服动物对无人机进行捕捉最早是由芬兰警方与鸟类训练机构合作进行的,将选中的鹰从小培养对无人机的捕捉意识,通过每次成功捕获后的奖励机制,训练对无人机的捕捉能力。经过训练后的鹰隼可由管理人员指挥,利用其擅长捕捉的优势,对远处无人机进行快速致命打击,破坏其动力系统,实现捕捉。鹰隼的饲养成本低,在无人机捕捉过程中无需人工干预。
但是因为需要从小进行培养,对培养人员与培训周期有很高的要求,并且鹰隼在执行任务的时候主要依赖于训练培养的条件反射,不具有意识思维,捕捉过程中容易受到突发状况影响。
2.1.2 捕网弹
捕网弹丸可由肩扛式、车载式或无人机搭载的发射器进行发射,弹壳内为特制网,通过传感器控制捕网释放,散开的捕捉网包裹并缠绕无人机的旋翼,同时打开减速伞,达到捕获目的。
捕捉网对旋翼的缠绕会令目标丧失动力,但不会对其飞控或其他加载设备造成伤害。捕获后,可从设备中读取起飞点、飞行任务、飞控SN码等,实现对无人机飞手的追查溯源。但捕网弹丸在发射时会产生极大的噪声与后坐力,有效反制距离近,且无法进行连续射击。由于整个捕网反制系统依赖于特制网对无人机旋翼的缠绕,所以在面对固定翼无人机时,该反制技术效果不佳。并且,该反制手段有效防御范围相对较小,不论是人眼观测或是基于机器视觉的自动化识别处置都具有距离判断、轨迹预测可靠度不高的问题。
2.1.3 挂载式捕网
挂载式捕网与捕网弹丸作用原理相同,将大面积的捕捉网挂载于无人机下方,通过操纵无人机飞到目标上方,令捕捉网与其旋翼接触,实现缠绕并破坏动力,达到捕获目的。
无人机挂载捕网可以多次尝试,容错率高,并且可以将缠绕住的无人机带至指定地点。但该技术手段对无人机的操作人员有极高的要求,这不仅仅是单向的捕捉任务,更是一场飞手之间的博弈。与捕网弹丸相同,反制的有效性依赖于捕网对无人机旋翼的缠绕,所以无法应对固定翼无人机。
2.2 摧毁技术
摧毁技术即直接击毁目标无人机,通常用于隐私或安全系数要求较高的区域,为避免引发更恶劣的后果而采用的极端方式。摧毁技术手段主要分为五种,分别为特制无人机、常规火力、激光武器、微波武器、声波武器。
2.2.1 特制无人机
特制无人机包括利用动能撞击、利用爆炸破坏、利用搭载武器打击。该反制技术可在侦测到目标后立即反应,配备有光电系统时可实现较远距离目标识别。实施反制时,在飞手的控制下具有一定的容错率。但若不能及时达成反制目的,或许将失去处置入侵无人机的最佳时机,并且成功反制后也很难收回目标。
2.2.2 常规火力
常规火力即使用枪支或近防炮或特制反无人机炮弹对无人机进行摧毁,该反制技术常与针对无人机的火控系统搭配。采用大量的火力压制,技术难度低,但是弹药成本高,使用限制条件苛刻,误伤范围大,导弹碎片容易对周边造成附带损伤。
2.2.3 激光武器
激光武器主要利用激光的高能量对目标无人机聚焦瞄准灼烧,破坏重要部件,导致目标无人机失去控制并坠毁。近年来由于激光领域的不断突破,现已能以较低的成本获取较好的反制效果[5-6]。
激光武器可持续发射,作用距离远且无需考虑弹道与天气影响,在无人机反制领域中效费比高,发射成本低,具有良好的摧坚能力,可以击穿各类金属与非金属材料,从锁定目标进行攻击到击毁目标仅需要数秒钟。但是激光武器需搭配繁重的电源系统与降温系统,且反制的有效性需要高精度的聚焦能力,依赖于追踪制导的高灵敏度。在反制过程中,激光武器需要对目标灼烧,带有明火的无人机残骸会对坠落范围造成威胁,具有二次灾害隐患。
2.2.4 微波武器
微波武器主要利用衍射与电路耦合,令目标无人机中的电路模块吸收大功率的微波能量,导致内部传感器以及电子元器件出现击穿、反转、误码、记忆信息抹除等。一旦其功率超过敏感元器件的额定值,无人机内部设备就会因为过载而永久性毁伤,从而失控坠毁。
微波武器具有波束宽角度大的优势,反制过程中只需满足扇区覆盖而不必精确瞄准[7]。微波武器可以进行持续打击,有较高容错率,并且能够有效对抗为躲避雷达监视而涂有吸波材料的无人机。但是,由于微波武器强大的能量辐射,在旁瓣范围内的设备会受到一定的损伤,并且覆盖范围内的电磁环境会受到污染。
2.2.5 声波武器
声波武器利用同频共振原理,干扰无人机的陀螺仪,使其失去工作能力。由于无人机在进行自稳飞行时需要依赖陀螺仪反馈数据,供飞控系统调整飞行姿态,维持机身的平衡。若陀螺仪无法正常工作,则直接导致无人机丧失稳定飞行能力,失控坠落。
但是陀螺仪的固有频率位于低频段[8],低频声波在空气中的传播中不具备方向性,且300~500 Hz频段处于人耳可接收范围内,如果通过加大发射功率弥补声波在空气介质中的能量损耗不仅会增大成本,而且无差别攻击还会对周边造成影响。因此,如果要实现声波武器的应用,就一定要解决低频声波的定向传播问题。若采用多换能器阵列叠加输出可以生成高指向性声波,但是对换能器口径要求很高。Westervelt的声学参量阵与Berktay的远场解结论为小口径低频声波的定向传播提供了可能性。其原理为调制超声波作为基波,在定向传播过程中相互干涉生成和频波与差频波,而高频率的声波相比于低频率的声波在传播过程中衰减更强,基于原始声频信号的自解调与超声波的高指向性,最终实现低频声波的定向传播[9-10]。不过,当前声波的传播衰减仍是阻碍声波武器发展的难题,只能寄希望于相关领域学者的突破性进展。
2.3 信号干扰技术
信号干扰技术即根据无人机通信原理,以一种“非暴力”手段对目标进行反制[11]。空间中的电磁环境复杂且不稳定,存在有不可避免的多路径效应[12-13]。而无人机为避免数据链受到干扰,具有一定的射频干扰自适应抑制能力,但一旦无线电干扰超过阈值,就能阻断无人机与操作员之间的数据链路[14-16]。如果上下行数传、图传链路被阻断,无人机便与操作员断开链接,根据预设信息自动执行或原地降落或返航或悬停。如果卫星导航信号被阻断,无人机便失去导航功能,由GPS(Global Positioning System)飞行转变为姿态飞行模式,无法继续完成地面站飞行计划,无法自动返航[17]。信号干扰技术主要分为两种,分别为对控制信号和对定位信号的干扰。
2.3.1 控制信号干扰
当前无人机数据链路多为2.4 GHz、5.8 GHz频段的慢跳频系统[18],在进行信号干扰时,借助增益天线向目标发射无线电信号,实现干扰[19-21]。干扰方法包括阻塞干扰,通过足够的干扰功率,对目标通信带宽的全部进行干扰,破坏信息传递;多频连续波干扰,将干扰信号集中于覆盖部分跳频信道;跟踪干扰,在对目标信号进行侦测、截获、分析后,瞄准目标当前通信信道实施窄带干扰,再发射干扰信号压制住真实信号,使其误码率达到30%时即可实现令目标无人机失控,飞手丢失控制权[22]。
控制信号干扰技术在反制时只需确定大致方位而无需精确瞄准,不同于微波武器利用强大的能量破坏目标内部元器件,该技术只需发射信号能满足压制目标接收飞手信号的条件,便能在不破坏目标的情况下实现迫降或驱离。但是,该系统进行反制的时候需要对目标进行长时间的持续压制,并且当目标预设丢失信号后悬停或返航时,无法对其进行有效控制[23]。长时间使用无线电干扰,容易对周边电子设备的正常使用造成影响,污染无线电环境。采用追踪干扰时虽可尽量避免对其他设备的干扰,但是需要对信号进行快速侦测、截获、分析,增加了技术难度成本。
2.3.2 定位信号干扰
对定位信号即对目标的全球导航卫星信号干扰,令无人机丧失导航功能[24]。由于全球卫星导航系统采用直接序列扩频通信系统,具有载波频率公开固定、发射功率小、抗干扰的特点[25],因此有瞄准式干扰,精确对准信号载频,对特定码型卫星信号干扰;阻塞式干扰,干扰区域所有C/A卫星信号,其干扰体制包括单频干扰、宽带均匀频谱干扰;相关干扰,利用较大相关性的伪码序列实施干扰,其方法包括基于卷积码的数据链脉冲干扰、基于级联码的数据链脉冲干扰、同步序列精准干扰。但是在仅干扰定位信号的时候,并不能取得较好的反制效果,因此常与对目标无人机数传与图传信号共同作用。在反制时无人机与飞手之间丢失上下行数传、图传链路,同时无人机失去全球导航卫星信号,无法依靠定位信息实现自动返航或悬停。但是一旦干扰全球导航卫星信号,作用范围内所有使用定位信息的电子设备均会受到影响,并且失去控制的无人机若不能及时处置而长时间置于空中,将存在安全隐患。
2.4 信号欺骗技术
信号欺骗技术即破解目标无人机的数据链路,将包装后的虚假信号传递给目标,使其接收错误的信息。欺骗技术主要分为两种,分别为控制信号欺骗与定位信号欺骗。
2.4.1 控制信号欺骗
控制信号的欺骗主要通过技术手段侦测到目标无人机的数据链并进行解析,破解整个数据链的频率、带宽、调制方式和通信协议,向其输送虚假信号实现接管。根据无人机控制信号的接收周期规律,只要按照先于真实控制信号一定时间发送虚假信号,就能获取大部分控制权。
控制信号欺骗技术属于精准攻击,不会对周边的无线电环境造成影响,并且能够定点降落,具有很高的安全系数。但是这种方式极度依赖于无人机数据链技术体制与加密方式的公开,否则技术难度与工作量巨大。
2.4.2 定位信号欺骗
定位信号欺骗主要针对目标的导航系统,因为全球导航卫星本身的总发射功率有限,作用距离远且覆盖范围大,单个设备接收到的信号强度小,接收电平约为-130 dBm,通常使用3~6 dB增益的无源天线接收。因此,从地面向其发射虚假信号,信号强度和信噪比皆优于真实信号,即可实现信号欺骗[26-27]。定位信号欺骗主要有两种方式:第一种针对于内置有地理围栏的无人机,通过发射虚假定位信息,令其误以为处于禁飞区域内,随即触发原地降落程序;第二种则是诱导技术[28],包括通过接收所在位置的GPS信号,将原信号给予一定时延与放大后转发,使之测得虚假伪距的转发式欺骗,以及模拟以C/A码结构为基准、时间与位置进行了修改,通过复现的码相位与载波多普勒相位得到虚假伪距信息的产生式欺骗。
定位信号欺骗技术相较于控制信号欺骗技术而言,卫星导航信号的频点、格式固定且透明,对技术要求更低,但是需要发射虚假导航信号,会影响作用范围内设备GPS的正常使用,并且欺骗效果与无人机飞控策略紧密联系,不同策略的表现形式不同。此外,经过加密的军用导航接收机是具有欺骗识别能力的[29]。
表2对各种无人机反制技术进行了总结与对比。
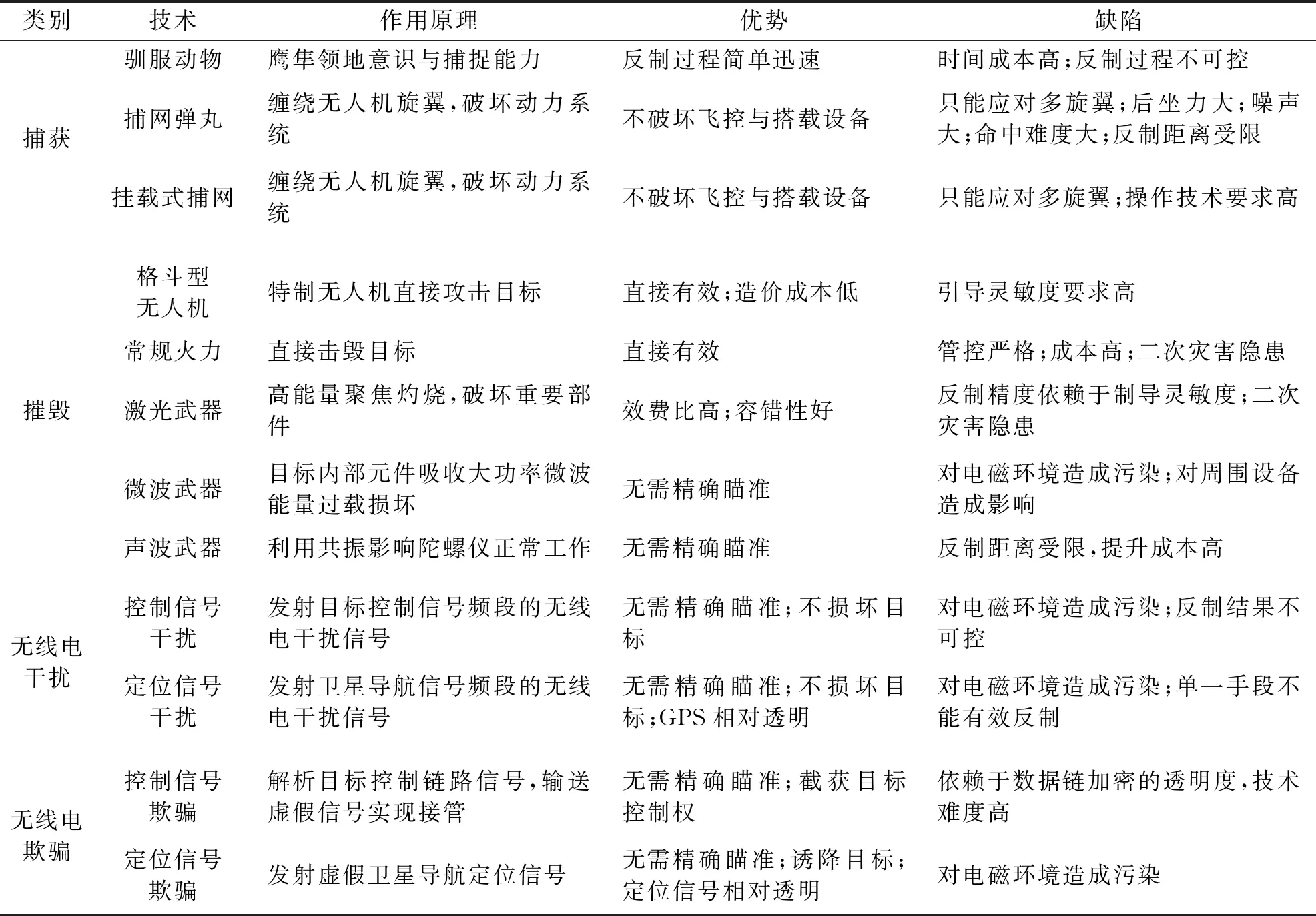
表2 无人机反制技术对比分析
3 无人机反制应用场景分析
无人机反制系统主要目的不仅仅为拦截处置无人机,还具有溯源需求,从根本解决黑飞无人机的威胁。在实际使用场景中无人机反制系统与探测系统需搭配使用,当前技术条件下单一探测与反制手段无法有效应对无人机威胁,应当在条件允许下融合使用多技术手段,并且不同反制手段具有不同的反制特性,反制方应当负有责任,误用或滥用都将带来严重后果[30]。为确保反制技术的有效利用,以下针对较为常见的民用无人机入侵场景进行分析。
3.1 临时活动现场
临时活动现场为举办于商场、体育馆等公开场所的演唱会、商业活动等,人口密度大,周边环境复杂且嘈杂。例如:2018年9月8日,首届洪泽湖大闸蟹节在江苏洪泽湖举行,现场飞入两架黑飞无人机;2018年9月21日,张学友在遂宁举办演唱会,警方在现场发现两架黑飞无人机。该场景中不论是环境条件还是成本约束都不利于使用雷达、光电系统,并且考虑到该情景下的黑飞无人机常为侥幸黑飞,因此可以依靠基于TDOA的多基频谱侦测设备组网监视附近无人机通信链路信号,同时实现对目标的识别与溯源。
针对临时活动现场若采用老鹰进行捕捉,周围复杂的环境与大量的噪音会极大地影响反制的作用效果;若采用捕网弹丸或摧毁手段时,失控坠落的无人机极易对现场群众的人身安全形成威胁;若采用无人机挂载捕网弹丸或捕网,虽可以有效反制无人机,并且避免可能的安全隐患,但是在背景复杂、夜间光线不足的情况下会对反制人员的操作能力形成较大的挑战;若采用控制信号欺骗技术,则需要进行一系列的破解动作,效率低下且无劫持必要;若采用全向的控制、定位信号全频段干扰技术,易干扰活动现场的无线电设备正常使用,同时范围内手机信号也会受到影响。因此,相对较为适合的反制手段为定向控制信号干扰与定位信号欺骗技术。无人机反制枪具有体积小、携带方便、操作简单、学习成本低的优势。反制执行位置应于活动区域外圈,处置过程中避免指向活动中重要的无线电设备。定位信号欺骗技术既可配合信号干扰技术诱导降落,也可传输虚假定位坐标,令目标触发地理围栏。为保证反制过程中的安全,不论是驱离还是迫降无人机,都应当确保执行过程中不会误伤群众。
3.2 重要临时活动现场
重要临时活动现场为各类晚会、政要人物出席的会议、阅兵仪式等,活动现场人口密度大,安保工作要求严格,不允许发生意外事故。2018年8月4日,委内瑞拉总统马杜罗在首都加拉加斯就军队纪念活动发表讲话时,一架携带炸药的无人机飞入现场并引爆,造成多人受伤。该场景中的无人机探测可结合使用多基频谱侦测设备组网运行与声纹侦测技术,作为频谱侦测可能遗漏的弥补措施。为了确保安全,主办方应向相关机构申请临时无人机禁飞区,并上传至合作产商的无人机地理围栏系统中。
重要临时活动现场同一般临时活动现场一样不适用于一些反制手段,并且对于仍能闯入的无人机,基于地理围栏的定位信号欺骗技术也无法反制。因此,相对较为适合的反制手段有摧毁技术、信号干扰技术、无人机搭载的捕获技术。其中摧毁技术是作为其他手段失效或形势紧张的应急手段,采用最果断的方式尽量减小可能的伤亡;信号干扰技术在使用的时候应确保稳定控制目标无人机,当无人机迫降时还应注意疏散群众,并且在确定解除其通信能力后才能停止信号压制。此外,也可采用全向多频段信号干扰设备,以短暂范围内信号丢失作为代价,阻断入侵无人机信号,逼停目标行动;无人机搭载的捕获技术可作为应急补充,当目标携带危险物品的时候,若直接击毁或迫降目标可能会对群众造成更大的威胁,因此可由反制人员操作无人机将目标捕获至安全区域,再有专业人员解除危机。
3.3 重要固定地点
重要固定地点主要包括政府机关、监狱、弹药库、油厂、军事基地、射电天文台等,为防止航拍爱好者误入应当及时申请禁飞区。2017年7月4日,在美国南卡罗来纳州的最高安全级别监狱,一名囚犯通过无人机的协助成功越狱。2018年6月30日,俄罗斯驻叙利亚军事基地上空出现大量企图发动攻击的无人机。2019年9月17日,沙特最大炼油厂遭遇无人机袭击,对全球原油市场影响巨大。其中,这些地点可分为两类,无线电环境敏感地区,如军事基地、射电天文台等;非无线电环境敏感地区,如监狱、弹药库、油厂等[31]。
3.3.1 无线电环境敏感地区
由于对无线电环境的需求,在探测手段中应避免使用主动雷达,同时在反制时也应当避免使用全向非追踪式无线电信号干扰技术、定位信号干扰或欺骗技术。较为适用的为激光武器与捕网弹丸,但反制手段的效果依赖于光电系统的制导性能,并在反制时应注意无人机残骸坠落带来的安全隐患,以及装配消防装备以应对明火可能诱发的二次灾害。
3.3.2 非无线电环境敏感地区
虽然部署于无线电环境敏感地区,但是在反制措施的选择时应避免滥用全向无线电信号干扰技术,如2020年北京某监狱就因使用全向无线电信号干扰设备导致范围内民航航班的通信信号长时间丢失。但在与相关部门协调的情况下,可通过无人机预警设备发现可疑目标后,短时间使用全向、定向全频段无线电干扰设备进行拦截。在油厂、弹药库等特殊地点,应尽量避免使用摧毁技术,以免造成更大的安全事故。鉴于其所在地通常为偏远地区,人口密度小,周边环境空旷,因此可以使用定向无线电干扰设备结合无人机侦测预警系统实现有效的安全保障。
3.4 重要移动目标
重要移动目标主要为政要人员车队或重要物品转移车队。车队行驶距离远,很难沿途设置地理围栏,在城区移动时周边环境复杂、掩体多。在移动过程中,入侵无人机多为近距离突袭,优先保障安全,对溯源需求不高,可采用声纹识别作为入侵无人机预警系统,待靠近后由防务人员目视寻找与无人机火控系统相结合锁定目标。因此,在车队行驶过程中,可以选用枪式捕网设备与枪式无线电发射设备,并且由两辆搭载全向无线电反制设备的车辆置于车队头尾,令重点保护车辆位于其信号干扰作用范围的重叠区域内,以短时区域信号影响作为代价,采取全向无线电信号干扰或全向定位信号欺骗手段。不过,若使用枪式捕网设备时,应当注意对防务人员进行相关培训,因为无人机的突袭容易造成紧张情绪,而该反制设备具有极大的后坐力,有造成防务人员受伤的可能,2020年“无形截击”无人机与反无人机大赛中就有选手因使用枪式捕网设备导致肩部骨折受伤。
3.5 边境地带
边境地带一直是国与国之间的敏感地带,这些地方往往荒芜辽阔,并且出于各种原因常有无人机互相试探的现象,并且侵入无人机常具有较高的研究价值[32]。
在边境地带环境干扰小、地势空旷,采用鹰隼捕捉不仅可以获得良好反制效果,还可以避免加重事态。而控制信号欺骗技术虽耗时耗力,但边境处侵入的无人机对时间的要求更宽松,针对特殊目标破解劫持性价比极高。2019年6月,美国无人侦察机就曾多次入侵伊朗南部,伊朗方面多次将其RQ-170S“哨兵”无人侦察机和MQ-1C“捕食者”攻击无人机劫持,采用的就是无线电信号干扰结合定位信号欺骗的手段。
3.6 民航机场
一直以来民航机场都属于无人机非法入侵的高发地,成都双流、苏南硕放、昆明长水等机场均发生了多起无人机黑飞扰航事件。为保障航空运行的安全,民航机场不仅净空保护区域大,而且电磁环境要求严格,并且我国民航机场基本都已预设地理围栏,入侵目标多为非合作式无人机,因此频谱侦测存在遗漏可能性。为确保机场终端区的监视可使用多基外辐射源雷达组网运行,通过接收当地电视塔反射信号对“低慢小”无人机进行大范围预警,当捕捉到目标后,由Ku频段主动雷达与光电系统配合实现高精度的探测识别。针对机场方管控需求,入侵目标处置与溯源都十分重要,而雷达探测不具备溯源能力,因此需要考虑尽可能在反制过程中实现溯源。
机场对周边无线电环境要求严格,特别是GPS信号所在频段,且时常发生因信号干扰导致的ADS-B失效、GPS故障、GPS与FM位置不一致、GPWS地形探测故障等,影响航空器的导航监视;长期虚假警告还会干扰飞行员的判断,危害航空安全。2020年因信号干扰导致百起航班复飞,确定干扰源近40处,其中无人机反制设备就占据八成。2020年上海进博会期间就发生了采用无线电干扰设备反制无人机导致的民航航班被干扰事件,因此在机场终端区内应避免使用无线电干扰技术与定位信号欺骗技术,而控制信号欺骗技术在军事化发展的带动下可根据实际成本消耗再做考虑。
由于鹰隼对其他鸟类具有极强的威慑作用,2019年12月,首都机场正式首用鹰隼驱鸟,因此可以将动物捕获的手段作为近机场区域内无人机入侵的应急措施。捕网技术由于其可捕捉溯源以及无人机搭载平台灵活迅速的优势,能有效保护机场空域,但是应当考虑到捕获效率低导致的净空范围内多飞行器滞空的影响。激光武器作为现有无人机反制技术中不造成电磁环境污染且具有远距离稳定能力的反制手段具有明显优势,并且雷达与光电系统为激光武器的制导提供了基础。
4 结束语
当前,无人机市场发展迅猛,在低空领域管理制度逐渐跟进的过程中,如何有效处置无人机的黑飞现象将是一个难点。本文首先梳理了国内外无人机反制领域的发展,指出了我国与国外在无人机管控上的差距与应对措施;以捕获技术、摧毁技术、信号干扰技术、信号欺骗技术四个类别分析并归纳了当前无人机反制领域中常用的反制手段,并根据各反制技术作用原理与特性,分析了不同反制技术的优势与缺陷以及当前的研究瓶颈;最后通过对临时活动现场、重要临时活动现场、重要固定地点、重要移动目标、边境地带、民航机场六类常见的无人机入侵场景的分析,提出了无人机防控的两个主要需求,即反制效果与溯源能力;结合不同反制技术手段的反制效果与特点与主流的“低慢小”民用无人机探测技术,指出了现有技术单一探测与反制手段无法有效应对无人机威胁,应当融合使用多技术手段;此外,针对实际应用场景提出了有利于提升反制黑飞无人机的有效性的参考性方案。