某型飞机电传系统交联故障研究
2022-03-26李平武刘志勇游炯华
李平武,刘志勇,游炯华
(国营芜湖机械厂,安徽 芜湖 241007)
现代飞机装配有大量的各类传感器,用于测量飞行所需的初始参数。线加速度传感器,用于测量飞机法向、侧向的线性加速度,产生与线性加速度成正比的直流电压信号,输出供给操纵系统作为反馈控制信号,其测量精度和工作可靠性,直接决定飞机操纵系统工作的稳定性[1]。为了降低传感器引起的电传系统故障率,需要充分了解和掌握该类传感器的工作原理和维护方法,开展故障分析,制定改进措施。
1 故障现象
某型飞机飞行时电传4通道故障信号灯亮,能按灭,飞行故障清单报“极限通道故障”,地面检查发现4通道电传计算机面板上“俯仰2”和“极限”信号灯亮。
2 原理分析
2.1 极限限制通道工作原理
该通道主要接收法向过载允许值、迎角允许值、当前迎角值,以及杆位移、过载、角速度、动压等信号,在极限限制计算机中进行控制律计算,限制拉杆时产生正向过载和迎角。在飞行中当驾驶员沿纵向拉驾驶杆时,迎角和过载处于允许范围内,纵向杆位移传感器的输出信号XP除了输给俯仰操纵通道,同时也输给极限限制计算机,此信号变换为相应的控制信号XPm驱动极限舵机带动弹簧拉杆移动,保持弹簧拉杆与驾驶杆摇臂之间有一间隙d,不妨碍纵向操纵,控制通道中同时还加入法向过载、俯仰角速度和迎角信号,其中法向过载信号用以调整间隙d(见图1),迎角和俯仰角速度信号用以改善极限舵机的跟随特性。

图1 极限限制通道原理图
2.2 极限限制通道故障表决监控原理
极限限制通道为带有计算机和伺服机构检测装置的无余度系统,其表决监控方式如图2所示。

图2 极限限制通道逻辑表决原理图
在电传控制计算机内配置有极限计算机和伺服放大器插件,两块极限状态计算机分别接收来自3、4通道的法向过载、俯仰角速度、迎角、杆位移等信号,进行相同的极限限制控制律计算,并对两者输出进行比较监控。当4通道法向过载、俯仰角速度、迎角、杆位移输入信号异常,超过预定门限值时,断开舵机离合器,触发故障告警信息,提醒和限制驾驶员的操纵。
2.3 纵向通道反馈控制工作原理
纵向通道反馈控制信号由俯仰角速度信号和法向过载信号组成,二者分别用于增加飞机纵向动态阻尼和静安定性,以达到改善飞机纵向飞行品质、放宽静安定性的目的。为了满足不同飞行状态的要求,俯仰角速度信号和法向过载信号反馈分别按q(动压信号)进行调参,并根据不同飞行状态改变其传动比。在飞行状态,系统采用俯仰角速度信号和法向过载信号的混合反馈,俯仰角速度信号、法向过载信号输入电传控制计算机后,经传动比调节和结构滤波器校正、调参。在起飞、着陆状态,法向反馈信号断开,俯仰角速度信号除保留飞行状态控制信号外,增加校正输入信号。综上可知,纵向通道与极限限制通道信号交联复杂,互相影响,交联关系如图3所示。
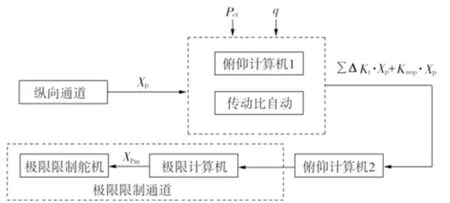
图3 纵向通道与极限限制通道信号交联关系图
2.4 线加速度传感器简介
线加速度传感器是由质量摆式加速度传感器和放大器组成的闭环测量加速度系统,主要用于测量飞机敏感轴方向的线加速度,并输出直流电压信号,其值与作用于测量轴的线加速度成正比,符号取决于线加速度作用的方向,其输出供给操纵系统作为反馈控制信号。原理如图4所示。

图4 线加速度传感器原理图
当线加速度传感器在敏感轴方向受线加速度作用时,质量摆产生偏摆力矩,使悬挂系统偏转α角,通过角传感器产生与α角成比例的电压u,经相敏整流,放大后转换为一定极性的电流I给力矩器线圈,力矩器产生与电流成比例的力矩与质量产生的偏摆力矩相平衡。
3 故障排除
(1)由于故障现象不稳定,时有时无,接地面检测设备检查系统各通道电压输出均正常;
(2)通过全静压试验器模拟飞行高度、速度,上电检查故障不复现;
矩形空心墩轴压比为0.1,在不同剪跨比、配筋率时,空心墩位移延性随纵筋强度变化情况见图13。由图13可以看出:剪跨比、纵筋配筋率不变时,空心墩极限变形能力随着纵筋强度的提高而减小,同时图中各线基本平行,说明由于纵筋强度的提高,空心墩位移延性的下降变化率不受剪跨比与配筋率的影响。
(3)拆下4通道电传计算机和电源部件,目视检查插钉、插窝无弯曲、断折、退钉、松动、多余物现象;
(4)为了复现故障,拆下角速度传感器,模拟空中飞行状态,反复测试故障不复现;
(5)拆下线加速度传感器并模拟法向过载的变化,故障复现,4通道故障信号灯亮,故障清单报“极限通道故障”,计算机面板上“俯仰2”和“极限”信号灯亮,对调3、4通道法向线加速度传感器插头,再次上电,模拟故障转移到3通道,确定4通道法向线加速度传感器失效。为了进一步查找传感器失效原因,接传感器试验台,在最大远距偏差电流下,测量最大输出信号值为6.6 V,正常为(5±0.3) V,且不能调整,确定传感器组件故障。由于传感器组件放置在一个充氮密封壳体里,不可分解修理,传感器返制造厂进一步检查。
综上分析,本次故障为4通道法向过载传感器失效,在俯仰计算机2监控表决出故障,“俯仰2”故障信号灯亮,同时当4通道法向过载信号异常时,极限计算机根据输入的法向过载信号进行极限限制控制律计算并进行比较监控,超过预定门限表决出故障,故障清单报“极限通道故障”,同时“极限”信号灯亮。
4 线加速度传感器失效原因分析
(1)受材料和制造工艺限制,线加速度传感器精确度和可靠性无法达到理想状态,当飞机大机动、大过载飞行或航炮靶试时,质量摆容易产生瞬时卡滞,机械限位差异引起输出不一致,导致航向通道表决值超出门限,电传控制系统报航向通道故障,部分传感器在外力作用下或断电后再上电恢复正常工作。
(2)产品防护不当对传感器内部结构造成损伤,主要表现在:①传感器移动过程中防护不当,较大幅度的晃动,对传感器内部结构造成损伤;②系统调试时,未按工艺规定先断开机上电源,而是带电进行传感器插头的拆装;③系统下电后,未等传感器完全停止运转,就开始拆装工作或移动传感器;④外场牵引飞机或试车时,飞机紧急制动或剧烈晃动,对传感器内部结构造成损伤。典型案例:某型机进行直接机务准备时,在完成各系统通电检查后,按计划进行发动机性能试车,牵引飞机的过程中,机务人员发现牵引道上有石块,让座舱机械师紧急刹车,机械师在拉应急刹车手柄时,由于用力过大,加上飞机满油状态,导致飞机刹车瞬间机头剧烈晃动,在发动机性能试车时电传1通道故障信号灯亮,最终定位“1通道航向线加速度传感器”故障。由于牵引飞机前系统上电均正常,判断造成故障的直接原因是牵引飞机时刹车过猛,机头剧烈晃动,造成传感器内部元器件失效。
5 改进措施
(1)新品入库时,提高传感器零位信号电平、灵敏度阈值、噪声电平、消耗电流、绝缘电阻的检查标准,对一些参数在临界状态的传感器进行返厂处理;日常产品修理时,使用浸润酒精的细棉布擦拭元器件表面,并用压缩空气吹干接点上的残余酒精,防止元器件损伤,提高产品在外场工作的可靠性。
(2)针对线加速度传感器故障率高的问题,邀请传感器设计制造部门专家开展故障研讨活动,梳理和分析传感器失效的原因,从产品制造材料、工艺、生产环境等方面入手,提高产品制造精度和可靠性,并制定产品升级方案。通过控制传感器组件机械限位值、增加二极管阵列降压模块降低最大输出幅值、调整动态电容优化高频动态特性等改进措施,对传感器进行了改进。从外场使用情况看,升级后的线加速度传感器故障率明显下降,改进效果良好。
(3)外场维护时,加强对各类传感器的防护,明确轻拿轻放要求,并定期组织工艺学习,开展现场工艺纪律检查,严禁“带电操作”;外场牵引飞机、罗差校正、试车滑行需要制动飞机时柔和拉动应急刹车手柄,避免用力过猛导致飞机剧烈晃动,对传感器内部结构造成损伤。
6 结论
线加速度传感器在军用、民航飞机上应用比较普遍,传感器的可靠性直接关系着飞机的可靠和飞行员的生命安全。因此,要提高产品质量,良好的机务作风和过硬的业务能力是基础。对于日常维护中发现的系统性问题,要做好产品的持续改进,一方面加强自身发现问题、解决问题的能力,同时与产品设计部门、制造部门建立有序联动,这样才能从根本上解决问题,达到提高产品质量的目的。
