断路器合闸过程中自力型触头变形行为研究
2022-03-26刘猛马腾迪
刘猛 马腾迪
(西安西电开关电气有限公司)
0 引言
GIS是电力系统中的重要设备,由于其具有体积小、占地面积少、维护方便等优良条件在电力系统中得到广泛应用。随着当今社会经济和生活水平不断提高,对电能的需求日益增大,对电能质量的要求也越来越高。提高高压开关设备的可靠性、稳定性显得越来越迫切[1]。
高压断路器在分合闸过程中,动静触头发生接触、碰撞、滑动摩擦,极易导致触头表面划伤,产生金属微粒和微小的毛刺[2]。而异物放电则是高压开关主要故障类型之一[2-3]。
长期以来,人们解决触头掉屑主要关注动静侧对中、触头材料、触头结构和表面状态等几个方面[4],但是对于合闸过程中的触头变形行为对磨合掉屑的影响则较少研究。
接触问题是一种高度的非线性行为,在计算过程中需要耗费大量的资源。GIS断路器动静触头结构大多具有圆周对称性,其中静触头采用自力型触头。在仿真计算中,通常采取简化模型的办法来降低计算规模,节省计算时间。在以往的文献中,王之军等采用冲击动力学的分析方法,来模拟合闸过程中触头的应力和变形规律,并分析动触头塑性变形对断路器开断的影响[5]。张沛文等在考虑触头塑性和摩擦的情况下,对触头施加实测运动速度,模拟了合闸过程中动静触头的力学响应[6]。
但是,采用简化模型对触头合闸过程进行仿真,并不能最大限度地真实反映合闸过程中的变形行为。本文通过对全尺寸动静触头合闸过程进行仿真,对静侧自力型触头的变形行为进行了研究,以期对改善合闸过程中的触头磨合提供理论指导。
1 仿真模型建立
1.1 几何模型建立
本文选用了一种常见的自力型触头作为计算对象,并对其进行三维建模,如图1所示。
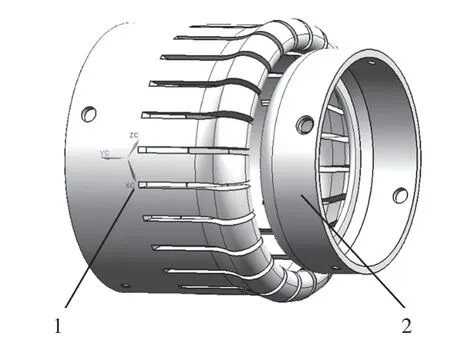
图1 动静触头几何模型
1.2 仿真条件设定
将模型导入Ansys workbench,选取Explicit Dynamics显示动力学模块进行计算。动静触头均选取Explict Materials 材料库中的COPPER为零件材料。为减少运算量,采用系统中等网格尺寸对模型划分网格,如图2所示。将静主触头螺纹面设为固定面。

图2 网格划分效果
本文首先研究了自力型触头在灭弧室设计合闸速度7m/s下的动态变形行为。然后,研究分析了合闸速度对自力型触头变形行为的影响,速度分别选取为1m/s、4m/s和7m/s。最后,又根据自力型触头的变形特点,研究分析了触头结构对自力型触头变形行为的影响,将合闸速度设置为7m/s。
2 计算结果
2.1 自力型触头动态变形行为研究
首先对自力型触头在7m/s速度下的动态变形行为进行了仿真计算,计算结果如图3、图4所示。
通过图3可以看出,触头在合闸过程中随时间变化,触指并非均匀向四面张开,而是存在明显的不均匀变形现象。将形变效果放大3.2倍,显示大量触指与动触头脱离。这种不均匀变形可能对触头磨合造成不利影响。
从图4可以看出,脱离侧应变量大于接触侧,且在翘起最大的触指根部应变最为集中。此外,触指根部应变分布并非沿触指中线呈对称分布。
结合图3、图4所示结果可以得出,在动触头插入过程中,每个触指形变量并不相同,并最终在某一触指处达到最大,而应变的不均匀分布致使部分触指与动触头脱离接触。触指与动触头不均匀接触会导致触头磨损状态不一致。合闸过程中触指应变的不均匀分布可能是导致触指与动触头不均匀接触的原因之一。
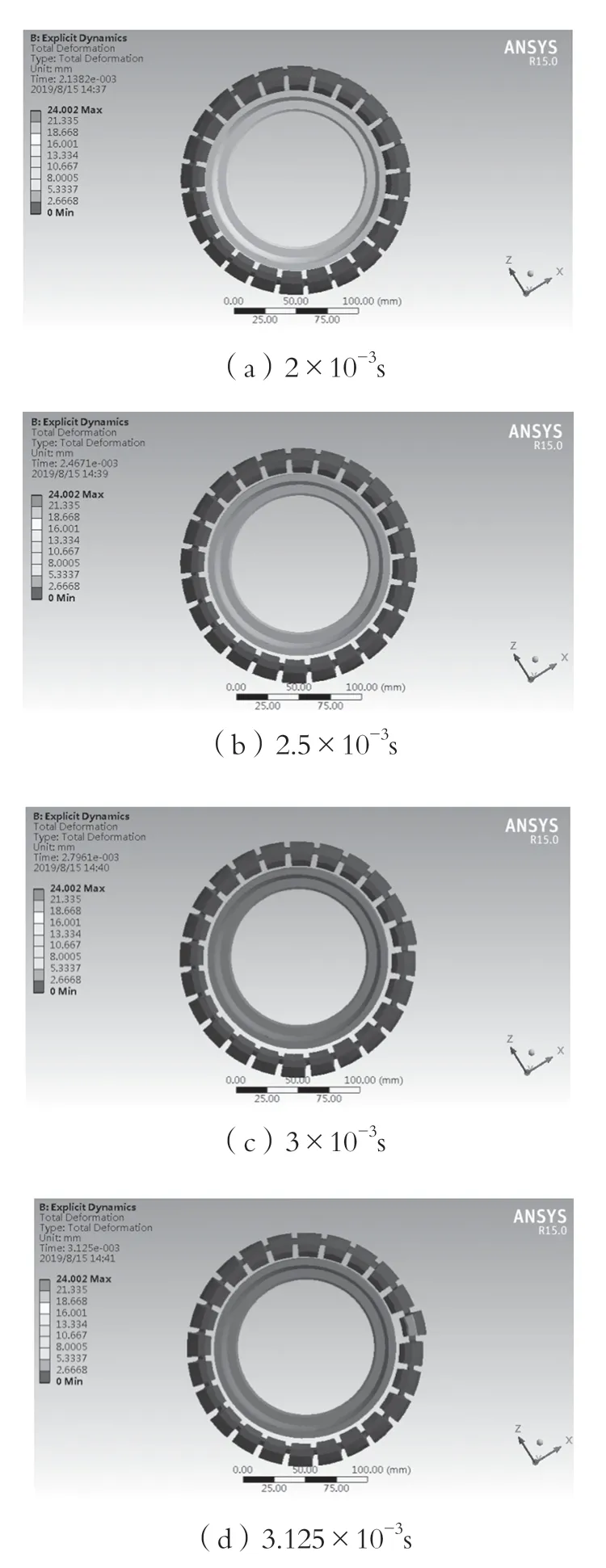
图3 触头随时间动态变形过程3.2倍正向形变云图
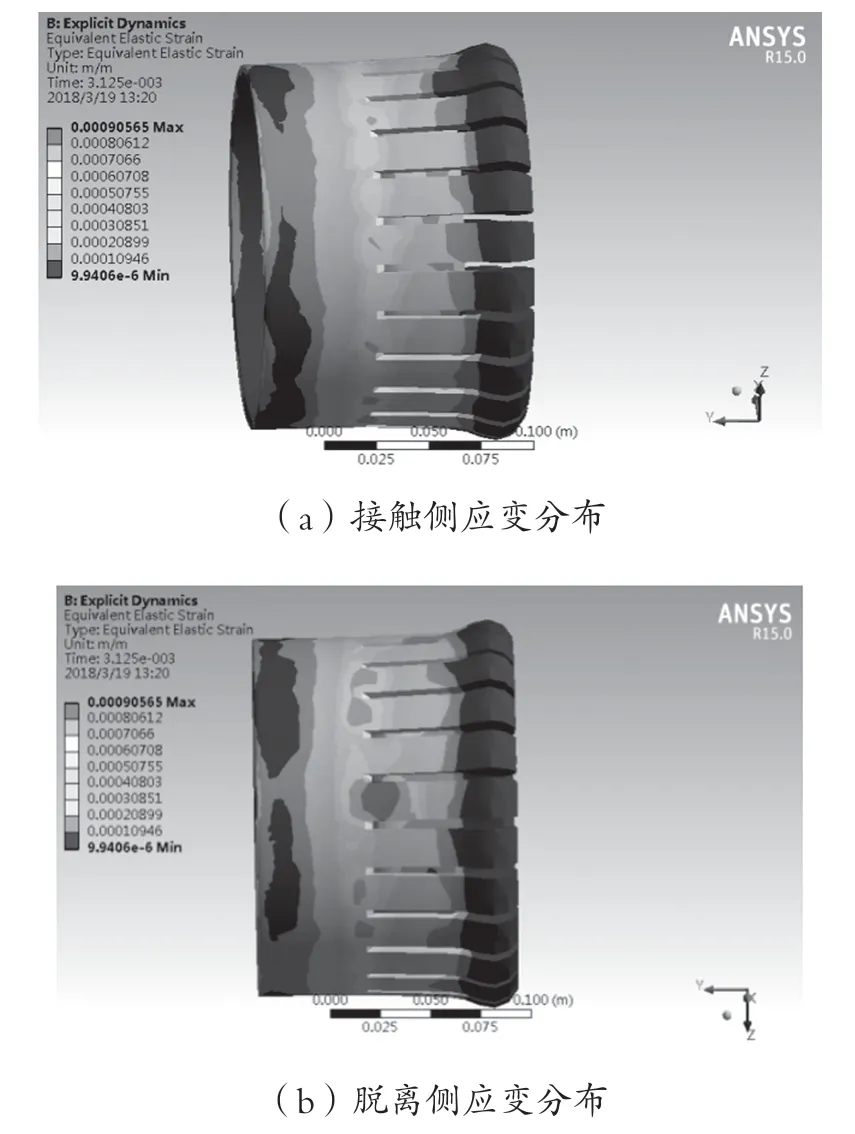
图4 侧向应变分布图
根据波动力学原理,任何材料都具有可变形性和惯性,当其受外部载荷的扰动时,其变形并不是一蹴而就的,而是应力波传播、反射和相互作用的结果。当所研究的或所观察的时间尺度相对于应力波传播持续时间已足够大时,即介质中的应力可视为瞬间平衡或均匀,因而,可以忽略应力波传播所带来的影响,而着眼于应力平衡后的力学问题,即将问题视为静力学问题进行分析。但是,对于一些高速冲击或载荷问题,其在毫秒、微秒甚至纳秒时间尺度上扰动信号极大,且总持续时间极短,此时应力波的传播所带来的影响不可忽视,反而起到关键作用。此时,材料内部应力远没有均匀,因此就造成了应变不均匀分布等现象[7]。
2.2 合闸速度对自力型触头变形行为的影响
为了进一步分析造成触头发生上述不均匀变形的原因和影响因素,对自力型触头在1m/s、4m/s和7m/s三种不同的合闸速度下的变形行为进行了仿真计算,计算结果如图5所示。
通过图5可以看出,合闸速度对触头变形量有显著影响,速度越大,变形量越大。通过分析得出,合闸速度越大,自力型触头承受的冲量越大,触头内部承受的应力随之增大。当触指根部刚度不足时,一部分触指就会发生与动触头脱离的现象。
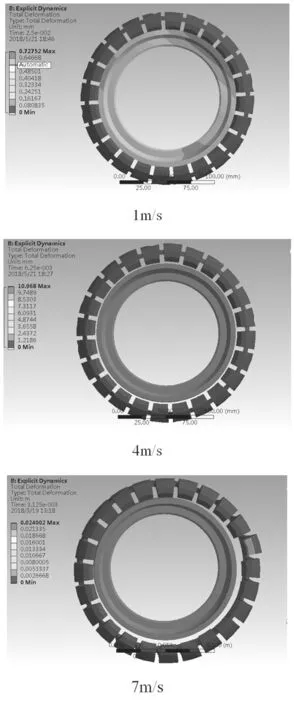
图5 不同速度下自力型触头3.2倍正向形变云图
2.3 触头结构对自力型触头变形行为的影响
为了验证设想,对触头结构进行一定修改,通过在触指根部增加一圈加强筋,以便提高触指根部刚度,如图6所示。
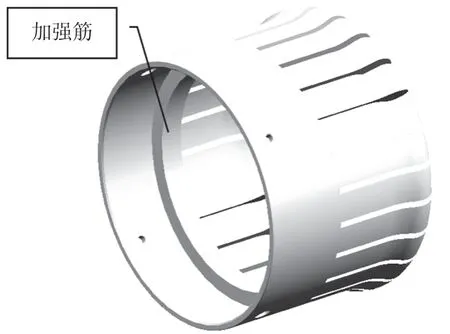
图6 加强筋增加示意图
在此结构上,分析了触头在7m/s合闸速度时的变形行为,计算结果如图7、图8所示。

图7 结构强化后触头正向形变云图
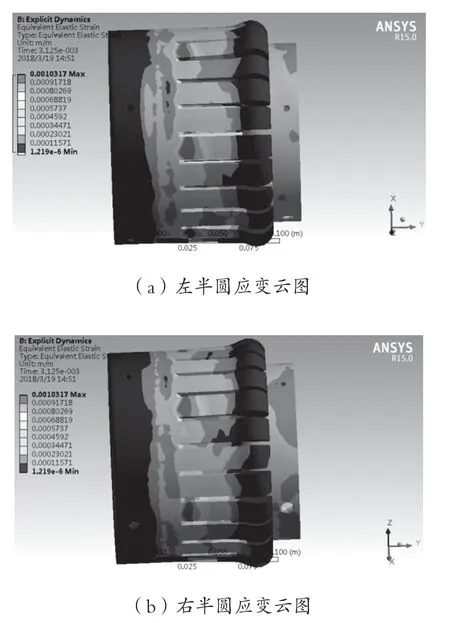
图8 结构强化后触头侧向应变云图
从图7可以看出,在触指根部增加加强筋后,触指形变比图3更加均匀,触指变形云图呈轴对称状。而从图8中的侧向应变云图也发现触指根部应变比图4更加均匀。以上现象说明,加强筋增加触指根部刚度对改善自力型触头内应力分布可以发挥显著作用。
3 结束语
通过以上分析研究,可以得出以下结论:
1)触头在合闸过程中触指并非均匀向四面张开,而是存在明显的不均匀变形的现象,一侧触指与动触头接触而另一侧则有大量触指与动触头脱离。这种不均匀变形会对触头磨合造成不利影响。
2)合闸速度对触头变形量有显著影响,速度越大,不均匀变形量越大。
3)加强筋增加触指根部刚度对改善自力型触头内应力分布可以发挥显著作用。
4)合适的合闸速度与触头刚度对控制触头不均匀变形是必要的,这对今后自力型触头的设计提供了理论参考。
