基于阈值分割的3D矿工图像鼻尖点检测方法
2022-03-26贺方圆刘诗源路铭陈景霞
贺方圆,刘诗源,路铭,陈景霞
(北京联合大学应用科技学院,北京 100012)
0 引言
3D图像人脸识别技术中的鼻尖点、眼角点等关键点的精确检测是特征描述及提取的重要组成部分[1],而鼻尖点成为首要考虑的检测对象。结合煤矿环境,煤矿出入井人员常佩戴安全帽、矿灯,以及部分矿工佩戴眼镜的情况,本文依据两个眼镜片和矿灯灯面的框架结构,提出一种基于阈值区域分割的3D矿工图像鼻尖点检测方法。
1 3D矿工人脸图像鼻尖点检测技术框架及流程
为保证煤矿工人的人身安全,矿井入井人员都必须佩戴矿灯和安全帽,矿灯佩戴位置主要有两种情况,一种是固定在安全帽上,另外一种是安置在腰间皮带上,本文只考虑安全帽上配置矿灯的情况,因此可以将3D矿工人脸图像分为有矿灯和无矿灯两种情况,然后分别在这两种情况下各自分为有眼镜和无眼镜两种情况。具体鼻尖点检测流程如图1。

图1 3D 矿工图像鼻尖点检测流程图
2 3D矿工人脸图像鼻尖点检测算法
2.1 眼镜及矿灯检测
在三维立体空间中,根据人脸表面、眼镜、安全帽以及安全帽上配置的矿灯的几何信息可以判断,眼镜片的框架几乎位于同一平面上[2],安全帽上的矿灯灯面框架也几乎位于同一平面上,而人脸表面和安全帽则位于不同的曲面上。根据这一特性,可以通过寻找两组位于两个平面上的3D数据来检测图像是否存在眼镜和矿灯。
2.2 人脸分割
根据拟合后的两个眼镜片和矿灯灯面框架公式,可以分别得到三维空间下眼镜片和矿灯灯面框架数据下X轴坐标下的最大值、最小值和中间值,如图2。

图2 眼镜片和矿灯X 轴坐标标记
矿工出入井是否佩戴眼镜和矿灯分4种情况,情况①:佩戴矿灯和眼镜;情况②:只佩戴矿灯;情况③:只佩戴眼镜;情况④:不佩戴矿灯和眼镜。具体的分割方法利用人脸几何结构设定的阈值函数进行判断,阈值函数如式(2~3):
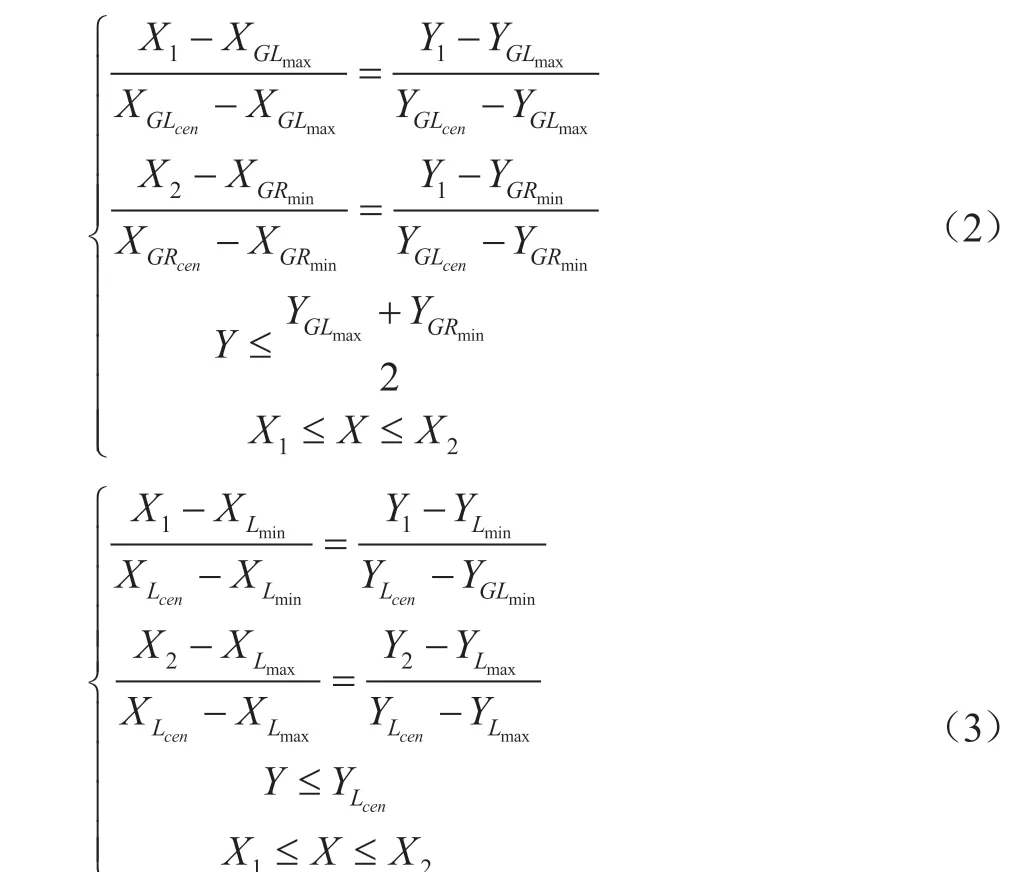
其中,式(2)为戴眼镜的条件下采用的阈值分割公式,式(3)为佩戴携有矿灯的安全帽而没有戴眼镜的情况下采用的阈值分割公式。
2.3 鼻尖点检测
本文使用局部特征和HK分类器检测鼻尖点。因为人脸三角网格模型M=(V,E)是由很多网格顶点和边组成的三角面片形式,整个人脸曲面不够光滑,且在离散的网格顶点上计算曲率误差会很大,所以首先对三角网格模型进行曲面拟合[3],拟合后的曲面如式(4):


3 实验结果与分析
为了评估本文所提鼻尖点检测算法的性能,设计了一组实测实验。实验测试的3D人脸数据来自实际拍摄的矿工人脸图像。该组数据包含了30个对象三种遮挡(携带矿灯的安全帽和眼镜,携带矿灯的安全帽,眼镜)90张人脸图像数据。本文实验检测到的鼻尖点位置和对应手工标定的鼻尖位置的欧氏距离作为实验误差,实验误差在范围0~10mm内,表明鼻尖点检测成功,否则表明实验失败[5]。图3所示为各样本的实验误差值,从图中可以看出大部分样本的实验误差都在0~10mm内。

图3 矿工图像鼻尖点检测误差
表2显示了样本的最大误差、最小误差、平均误差和检测成功率。从表中可以看出本文算法应用在3D矿工图像鼻尖点检测中的平均误差为8.11mm,在误差允许范围10mm内,检测成功率为90%,证明本文算法能够较为准确地检测出3D矿工图像鼻尖点位置。

表2 矿工图像鼻尖点检测结果
4 结语
本文分析了矿工人脸图像的特点,将基于3D的人脸图像识别技术应用在矿井出入井人员唯一性检测方面,提出一种基于区域分割的3D矿工人脸图像鼻尖点检测方法。该方法根据矿工图像的特点通过区域分割将安全帽、矿灯及眼镜的遮挡去除,消除遮挡对HK分类器的影响,提高了检测效率,且本文算法无需模型和训练,方法较为简单。
