基于北斗的无人机高精度自主导航与监控技术分析
2022-03-26李明饶弘
李明,饶弘
(中国民用航空飞行学院,四川 广汉 618300)
0 引言
无人机自主导航主要可以分成程控飞行与导航定位两部分,在当前科学技术不断发展的背景下,为切实提升无人机的工作效率,深入研究无人机的自主导航与监控技术,提高无人机的功能性,使其被广泛应用于农业种植、高空摄影、山区救援等场景当中,成了一项极为必要的工作。
1 无人机的物理平台总体架构
在无人机技术飞速发展的当下,无人机已经被广泛应用到社会各行各业当中,并取得了良好的工作效果。为切实提升无人机自主导航与监控技术的研究效果,本文主要以武汉无名科创公司生产的第二代飞控慧飞者,作为飞行控制系统的研究平台,并且该平台所应用的飞行控制系统处理器为ortex4内核的TM324系列处理器;无人监控系统则是用PC机上编写的C#桌面应用程序,在实际应用过程中,可以和导航通信系统进行网络远程通信。同时,导航通信板处理器STM32427,这种处理器容量大,最高运行频率可达168MHz,其芯片是TM32103ET6芯片,片上的接口包括USB、UART、CAN、SPI等。飞机控制系统内集成了惯性导航算法、电机控制、匿名上位机串口通讯协议、按键和OLED控制等软件系统[1]。
2 基于北斗的无人机高精度定位技术研究
2.1 RTK系统组成
当前,RTK系统主要由GNSS信号接收系统、数据链系统与数据处理系统共同组成,并且该系统在实际工作过程中,为保证差分计算工作的顺利进行,系统的工作阶段主要可分成卫星定位接收机数据接收、差分数据传输、差分相对定位处理三部分,以便保证定位功效能够切实落实[2]。在系统的实际应用过程中,首先,GNSS信号接收系统主要是由的北斗、GPS或者其他导航卫星系统接收设备与天线共同组成,主要可以分成单、双频两种,现阶段,由于单频机载作业容易失锁、不适用于动态测量等问题,因此,双频机的适用范围更大。其次,数据链系统设备主要包括调制器、解调器、有线或无线通信器等部分,为保证数据传输的安全性与效率,在进行基准站数据传输前,需先用调制器对数据信息进行编码调制,然后用有线或无线通信器将其传输到用户站的接收器上,再由解调器将编码的数据还原,并将其传给流动用户机。最后,数据处理系统还可以看作是RTK测量计算软件系统,在实际应用过程中,可以实现RTK定位。同时,在数据处理系统中,可以应用差分及算法计算,对基准站与用户机数据进行处理,从而得出最终结果,并且其计算精度与RTK测量准确性与可靠性之间存在着直接的联系[3]。
2.2 双差定位模型
RTK作为一种载波相位观测值差分相对定位技术,包含单差、双差与三差等形式,并且在实际应用过程中,可以通过差分组合的方式消除系统误差。需要注意的是,在实际应用过程中,受单差模式并不能有效消除接收机钟差、三差模式存在相互独立差分测量数值变少等不确定因素等问题的影响,因此,当前RTK定位较常应用的模式为双差模式,这种模式不仅可以有效消除系统误差,还能在不影响系统测量值的基础上减少计算。


通过对公式(13)进行求解的方式,可以得出各个双差整周模糊度值,并得到基线向量 ,进而得到相应的定位差分数据。
3 基于北斗的无人机自主导航监控技术分析
在当前科学技术飞速发展的背景下,研究无人机自主导航监控技术的目的在于,实现无人机导航信息与运行轨迹的远程实时监控,由监控软件自行为无人机远程发送导航任务,并保证无人机在执行自主导航任务的过程中,能够自稳姿态、自动定位。
3.1 无人机自主导航惯导技术
无人机自主导航惯导技术主要可以分成姿态解算与位置惯导两部分,其中姿态确定作为保证无人机飞行稳定性的前提,在姿态确定过程中,可以通过对IMU传感器数据进行解算,得到无人机的姿态角,然后依据数据信息由控制器通过PID计算电机的输出量,保证无人机的飞行器保持稳定的飞行状态,并且在飞行过程中能够通过自行变换得性倾斜角度的方式,保证自身始终能够朝着设定的位置飞行。并且,当前无人机在进行自主导航的过程中,定高、定点、悬停时观测量为静态观测量,为进一步提升数据信息的准确性,无人机在做竖直方向惯导时,核心观测器为加速度计;水平惯导时,主观测器为北斗接收器,辅助传感器包括光流计、气压计等器件。
3.2 无人机自主导航监控技术
当前无人机测控技术在应用过程中,需要以导航通信系统与监控软件上位机为基础,同时,监控系统数据传输构架如图1所示,其任务可以分成2部分,第一部分任务是飞控,系统将关键数据传输给导航通信系统,由导航系统将数据信息进行解析与封装,然后将其传递给上位机,令上位机借助后台处理程序,将信息转化为能够展示到前台页面上的数据、文字等能够被理解的符号信息;第二部分任务是导航通信系统将上位机为无人机输送的导航任务进行解析,然后参照AVINK协议,将其进行封装并传输给飞控系统,实现无人机飞行状态的远程操控。现阶段,大部分监控软件开发环境应用的是C#的WPF,这种开发环境相较于利用MFC进行上位机开发的方式更为先进,开发效率也更高、编程模式更为多样、占用的内存也更少,此外,C#网络编程与WPF因应用程序主要以C语言为基础,因此,程序开发难度并不高。近年来,随着WPS技术应用频率的不断提升,WPF不仅建立了API函数库,还可以引进了XAL语言,这种情况的出现使得程序在编写过程中,可以实时观测应用程序界面[5]。
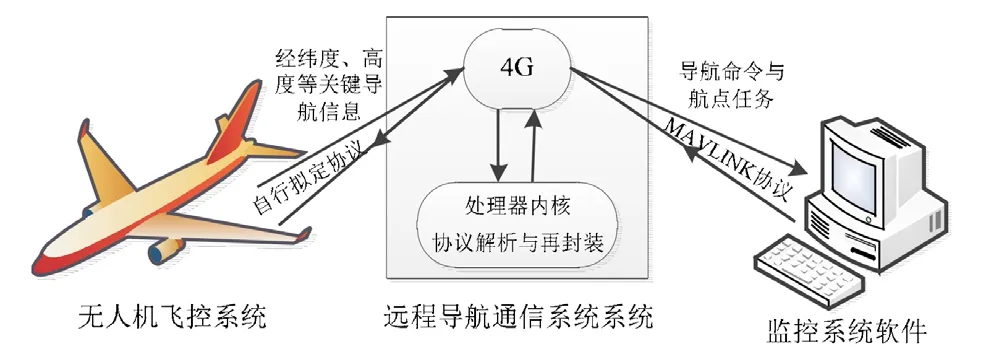
图1 监控系统数据传输架构
3.3 无人机自主导航路径规划技术
近年来,随着无人机惯性导航技术的不断优化完善,这一技术不仅可以满足无人机在飞行过程中飞行姿态自稳的要求,还能降低无人机在工作过程中,漂移、抖动等情况的出现概率。同时,若导航环境中并不存在障碍物,那么对于上位机安排的固定航点任务,无人机可以采用直线飞行的方式进行自主导航,但需要注意的是,当前无人机使用过程中,其导航任务环境存在障碍物的可能性极大,现阶段,为保证无人机能够有效完成任务,那么无人机在正式工作前,不仅需要合理规划自身的飞行路径,还需要保证自身存在一定的障碍物躲避能力,并且在飞行路径规划过程中能够自行规划合理的飞行路径。现阶段,规划无人机飞行路径的算法比较多,主要包括全局先验信息路径规划方法、局部传感器信息路径规划方法、智能深度学习类方法等,其中全局先验信息路径规划方法又包括A*算法、栅格法、Dijkstra算法等;局部传感器信息路径规划方法又包括基于RRT的动态路径规划、SLAM、激光传感器采集信息和传统路径搜索结合算法等;智能深度学习类方法又包括群蚁算法、遗传算法等。在考虑到本文研究的无人机计算量不大、研究成本较低、传感器存在一定限制等问题的基础上,为满足无人机自主导航的需要,可以应用离线状态的PRM路径规划算法对飞行路径进行规划。
3.3.1 PRM 路径规划算法研究
PRM作为随机路径图法,在实际应用过程中,可以先将连续的路径进行离散处理,分成若干个离散图或点,并且通过在路径范围内选择合适的随机点或图,形成相应的网络连接图,将离散点或图与周边多个点或图进行连接,从而得到若干个将起点与终点连接到一起的路径分支,然后通过路径搜索算法从中找到能够有效躲避全部障碍,并且飞行路径较短的分支,在本文的研究过程中,路径搜寻算法选择Dubins—A*算法。
现阶段,在PRM思想应用过程中,可以先将其分成PRM学习与PRM查询两部分,其中学习部分又可以将自主导航路线进行数字化处理,使其成为二维图表;利用PRM算法随机取点,构建飞行路径的网络图;依据网络图的先验信息去除障碍物与地图边缘可能与无人机发生碰撞的点,并建立导航图标路径这三部分。其中,查询部分又可以分成两部分,第一部分,将自主导航起点与终点加入路径图表中,判断未能连接两者的PRM随机取点路径,若所有路径都不能连通起点与终点,那么进入PRM学习阶段;第二部分若PRM随机取点路径可以有效连通起点与终点,在后续无人机飞行路径选择的过程中,就可以利用路径搜索算法,从路径图标中挑选最优路径。同时,在PRM算法执行过程中,其具体工作步骤可以分成以下五部分,第一步,明确无人机整体框架的大小,并以无人机为中心,确定无人机的监控范围半径,在系统设置过程中,可以以能够包含无人机的栅格点作为质点,并以此为单位将其飞行路径环境图进行数字化处理。第二步,标记不同状态的质点,同时,初始化随机点集N与路径集E等点集。第三步,在图表中选取合适的质点,并依据质点标记,舍弃与障碍物、边缘存在膨胀的点,保证自由空间内的所有点都不会与障碍点相碰撞。第四步,预设一个节点能够连接的相邻节点数量,然后令起点与终点之间的相邻节点两两相连,形成交错的路径网络连线图。第五步,利用Dubins—A*组合算法找出路径图标中最佳的飞行路径,然后将其加入集合E当中,形成连接关系。
3.3.2 PRM 路径规划算法仿真
将无人机飞行路径图标进行质点化的处理,是当前PRM路径规划的核心,并且在工作过程中,不仅需要明确无人机的大小,还需要保证Du bins算法在使用过程中,圆始终处于质点之内。为切实降低上述质点处理工作的难度,可以利用MALAB对路径进行仿真模拟,在模拟过程中,以全局先验信息作为路径规划算法研究的前提,然后依据无人机导航全局范围设定合适面积大小的地图,并在地图内设置一定量的障碍物,并且在PRM算法学习阶段随机选取质点,在此过程中,需避开与障碍物、边缘区域相接触的质点。同时,在完成PRM算法随机采样工作后,需要将有效质点按照相邻质点连接适量质点的方式,组成路标网络,为后续路标图查询、选择工作的开展打下良好的基础。需要注意的是,若在当前的路径查询过程中,若是直接使用Du ins—算法,而不是先用PRM算法,那么Du ins—算法在路径选择前,先对其场景图进行栅格化处理,然后以起点为基础,挨个计算相邻方向质点构成路径的评价函数F值,并且在碰到障碍物后,返回该查询路径的起点,然后从起点的第二个最优相邻节点开始重复上述路径查询工作。相较于先利用PRM算法学习阶段后利用PRM算法查询得出的路径,直接使用Du bins—A*算法得出的路径质量相对较低[6]。
4 结语
总而言之,在当前的社会发展过程中,对无人机自主导航、监控技术进行深入的探究,不仅可以有效提升无人机的性能,还能为农业、基建、商业、灾难救援等情况提供有效的服务支持,从而为社会经济与人们美好生活的发展提供支持。
