一种履带式车辆的遥控改造方案
2022-03-26平凡
平凡
(江苏无线电厂有限公司,江苏 南京 210000)
0 引言
履带式车辆是指通过履带行驶的车辆,具有越野能力强、转弯半径小、转向灵活等优点,在松软地面等复杂地形具有很高的机动性,于很多特殊领域有很大作用。正是在这些特殊领域的某些不利于人工驾驶的特殊情况下,如军事任务、危险作业、野外勘探等,如何通过改造车辆实现远程遥控驾驶,并使系统具有一定的优越性,是本方案主要考虑的问题。
传统的车辆遥控方式,主要是通过遥控终端向车辆发射无线信号,车辆接收无线信号后再转换为CAN通信传输至车辆的操纵控制系统,进而实现对车辆的远程遥控。但是这种远程遥控驾驶系统改造过程复杂,对车辆内部构造要熟悉,成本昂贵,且控制上容易出现偏差、影响因素较多。而且对于部分通过机械结构实现操纵控制的车辆,此改造方式并不可行。本方案以气缸为主要运动执行机构,通过气缸运动模拟人工驾驶的方式来实现远程遥控驾驶,具有结构简单、影响因素少、可靠性高、适用范围广等优点。另外,车辆的行驶参数监视系统、安全保护系统、遥控系统也是方案的重要组成部分[1]。
1 系统总方案
系统改造目标是使改造后的履带式车辆可以实现远程遥控驾驶,具备远程启动发动机、加减速、转向、制动、强制停车等功能,能实时监视车辆油量、机油压力、发动机转速及车辆行驶速度等行车参数,同时具有周边影像传输功能和安全保护功能,使车辆可以在操控人员目视范围外进行作业。改造后的车辆保留人工驾驶模式,并可实现人工/遥控模式的快速切换。
本方案远程遥控系统的实现主要是通过遥控终端经电台向车辆发射控制信号,车辆上的电台接收到控制信号后经PLC控制器驱动执行机构运动,执行机构代替驾驶员执行驾驶车辆所要进行的必要操作,模拟人工驾驶模式。车辆驾驶室内和车外装有高清摄像头,驾驶室内摄像头用于监视仪表盘上的行车参数,车外摄像头用于查看车辆周边影像,摄像头拍摄的图像经无线信号传输设备发送至遥控终端进行显示,便于操控人员及时了解车辆行驶状态和周边环境,提高遥控驾驶的安全性。车辆前方安装激光雷达,用于探测一定范围内的障碍物,能准确给出探测信息,并具备报警功能[2]。此外,车辆还配备了一个独立的强停电台,此电台用于车辆丢失控制信号时或紧急情况时的强制停车,通过步进电机关闭柴油控制阀,切断油路,实现强制停车。其系统组成框图如图1所示。
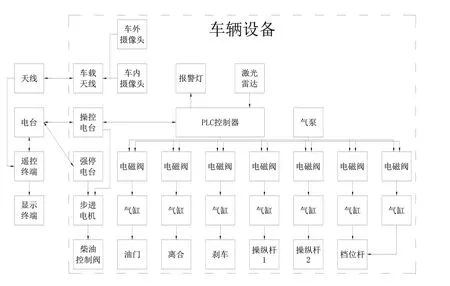
图1 系统组成框图
2 执行机构
执行机构是整个改造方案的核心机构,主要由PLC控制器、气泵、气缸、电磁阀等组件构成。改造时,将PLC控制器、操控电台、气泵和电磁阀等部件安装在车内适合位置,将气缸通过支架固定在驾驶室内的油门、离合、刹车、操纵杆、档位杆等操控机构附近,将气缸的推杆与上述操控机构进行连接固定,连接气泵、电磁阀和气缸,设备通过车载电瓶进行供电。当PLC控制器通过操控电台接收到遥控终端发来的命令后,PLC控制器向电磁阀发送控制信号,在气泵的共同作用下驱动气缸推杆做推拉运动。气缸推杆的推拉运动模拟了驾驶员脚踩、手拨等驾驶动作,从而实现了远程遥控驾驶[3],如图2所示。

图2 气缸执行机构示意图
单个气缸推杆的推拉运动只能模拟踩离合和踩刹车这样简单的单行程运动,对于踩油门、拉操纵杆和档位杆等多行程运动无法实现。此处通过串联组合2个或多个气缸来加以实现,并且通过对不同气缸的行程的选择,可以实现等距或不等距的多段运动。以2个气缸串联为例,假设气缸1的行程为L1,气缸2的行程为L2,当L1等于L2时,串联组合气缸可实现2段行程,分别是L1和L1+L2;当L1不等于L2时,串联组合气缸可实现3段行程,分别是L1、L2和L1+L2。通过此种方式可以模拟不同给油量和操纵杆多段档位的控制,示意图如图3所示。在串联组合气缸的基础上,增加一个垂直于运动方向的气缸,即可实现2个方向的运动,通过PLC控制器控制气缸运动的先后顺序,即可实现档位杆的多段挂档,示意如图4所示。
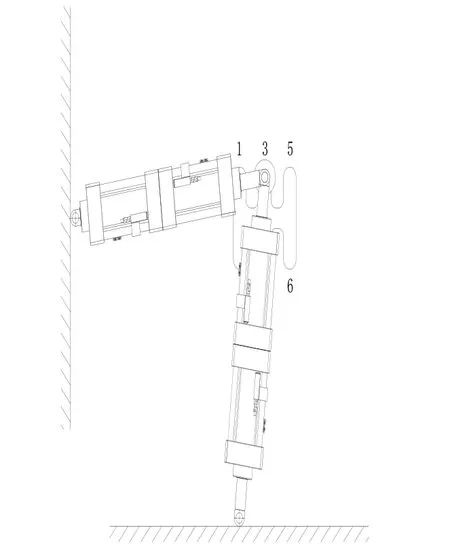
图3 串联组合工作气缸运动示意图
此外,为了检测气缸推杆是否运动到位,在车内操纵机构的每个档位位置要设立接近开关。将接近开关的信号反馈至PLC控制器,一部分信号用于控制气缸联动,一部分信号通过操控电台发送至遥控终端,通过遥控终端上的指示灯显示各气缸的动作状态,供操控人员进行识别和判断。气缸与车辆之间通过安装支架和快拆销连接固定,当需要切换至人工驾驶模式时,只要拔出快拆销即可拆除执行机构,快速切换至人工驾驶模式。
设计执行机构时,也可使用液压油缸、伺服电机、步进电机等具有直线运动特性的机构来代替气缸。液压油缸相比气缸来说,优点在于推力大,但液压系统往往体积大、重量重,不适合安装在驾驶室狭小的环境,也不便于拆装,同时液压油泄露会对驾驶室环境造成严重污染,影响人工驾驶。电机的优势在于可以替代串联组合气缸执行多行程动作,但电机的成本相比气缸来说要高很多。综合各方面因素,在满足功能要求的前提下,以气缸作为执行机构具有结构简单、易于拆装、稳定性高、成本低、适合范围广等特点,是最适合本方案的执行机构[4]。
3 行驶参数监视系统
车辆油量、机油压力、发动机转速及车辆行驶速度等行车参数是体现车辆状况的重要数据,可为驾驶员或操控人员操纵和维护车辆提供判断信息。一般是由车辆各个部位的传感器进行数据采集,然后将采集到的数据传送至对应的处理系统进行计算,再将计算结果传输至仪表盘进行显示。改造时,在驾驶室内安装一个高清摄像头对仪表盘数据进行视频采集,再将视频信号经过无线信号传输设备发送到遥控终端的显示屏上进行显示,操控人员在遥控操作的同时便可查看到车内仪表盘上的行车参数。切换人工驾驶模式时,无需拆除驾驶室内摄像头,节约切换时间。设计行驶参数监视系统时,也可以通过改造将仪表盘的传感器数据直接传输至遥控终端,在遥控终端进行数据的显示,但此方案施工复杂,还需有相应的软件进行数据处理,改造成本高。综合各方面因素,使用摄像头以视频画面的方式直接采集行驶参数,具有操作简单、可行性高、技术要求低、成本低等优点,适合本改造方案[5]。
4 安全保护系统
安全保护系统是车辆遥控驾驶的重要保护措施,包括车辆周边影像采集功能、雷达报警功能、电池供电功能和强制停车功能。影像采集功能通过车外摄像头采集车辆周边视频画面,将视频画面通过无线信号传输设备发送到遥控终端上进行实时画面显示,可供操控人员查看周边地形和路况、判断警情,也可作为操控人员的“双眼”,为目视范围之外的遥控作业提供帮助。雷达报警功能是通过安装在车辆前部的激光雷达对车辆行驶方向上的障碍物进行探测,将障碍物报警信号发送至PLC控制器,PLC控制器再将报警信号分两路输出,一路输出至车辆顶部的报警灯,一路经操控电台输出至遥控终端,触发报警指示灯,此时操控人员通过目视或车外摄像头查看车辆周边情况,对警情做出判断。电池供电功能是通过遥控终端的内置电池为车外设备供电,遥控终端可在电池供电与外部供电之间自动切换,以应对一些突发情况。强制停车功能是车辆遥控驾驶的最后一道安全防线,用于紧急情况的强制停车或车辆失去控制信号后的自动停车,主要由强停电台和步进电机组成。当操控人员触发遥控终端的强停按钮时,强停电台收到触发信号,驱动步进电机关闭柴油控制阀,直接切断车辆油路以达到强制停车的目的;当强停电台失去控制信号,操控电台未失去控制信号时,强停电台信号指示灯闪烁,由操控人员判断是否强停;当强停电台未失去控制信号,操控电台失去控制信号时,操控电台信号指示灯闪烁,由操控人员判断是否强停;当强停电台和操控电台都失去控制信号时,步进电机延迟一段时间自动触发强制停车功能。强制停车功能对照表如表1所示。

表1 强制停车功能对照表
5 遥控系统
遥控系统主要由遥控终端、电台、天线等部分组成,其中遥控终端是整个系统命令的输入机构,也是执行机构和其他分系统的行动反馈机构,包含开关按键、指示灯、显示屏、电池、航空插座等部分。遥控终端在设计时,除了需要合理布局所有器件,提升操控人员使用的便捷性和可操作性,减少误操作的可能性,还要注意器件的选型要安全可靠。电池电量选用数码管进行显示;电源输入选用12V直流电源,保证使用安全性;启动、离合、刹车选用自复位式拨动开关;油门、操纵杆1、操纵杆2选用3档拨动开关,用于档位选择;档位开关选用自复位式按键,按下按键后由PLC控制器控制执行机构依次运动,实现档位切换;强停开关旁边放置电台信号指示灯,方便根据电台信号判断是否启动强停功能;报警信号灯的开关可控,用于特殊情况下屏蔽激光雷达的干扰;显示屏通过画中画模式同时显示车辆周边环境和仪表盘信息,节省空间[6]。遥控终端界面示意如图5所示。

图5 遥控终端界面示意图
6 结语
以气缸作为执行机构,通过模拟人工驾驶方式来实现远程遥控驾驶的方案,具有结构简单、拆装便捷、灵活可靠、成本低的优势,同时方案兼顾了行车参数显示和安全保护功能,是一个完善的、具有可执行性的方案,对于一些未配备中控电脑的履带式车辆,作用尤为突出。通过对方案某些设计的延伸,可以使车辆在多种场合完成多种任务,比如应用在工程车辆上,通过增加串联组合气缸的数量便可在完成车辆行驶功能的基础上,执行其他动作;运用在军事领域,通过选用抗干扰能力强、性能更加稳定的军用级器件,便可加装在坦克、装甲车等履带式装备上执行侦察、模拟靶标等军事任务。
