透明工作面智能化开采大数据分析决策方法及系统研究
2022-03-26张科学徐兰欣毛明仓符大利张玉良王晓玲
张科学,徐兰欣,李 旭,毛明仓,符大利,张玉良,亢 磊,王晓玲
(1.华北科技学院智能化无人开采研究所,北京 101601;2.华北科技学院河北省矿山智能化开采技术重点实验室,北京 101601;3.中国矿业大学(北京) 深部岩土力学与地下工程国家重点实验室,北京 100083;4.西安科技大学管理学院,陕西 西安 710054;5.西安合智宇信息科技有限公司,陕西西安 710000;6.陕西陕煤黄陵矿业有限公司,陕西 黄陵 727307;7.中华人民共和国应急管理部煤矿智能化开采技术创新中心,陕西 黄陵 727307)
0 引 言
能源是人类社会存在发展的基石,是经济发展和文明进步的基本条件。 煤炭是我国主体能源和重要工业原料,是我国经济健康发展的重要支撑。 在我国一次能源资源中,煤炭占90%。 我国“贫油、富煤、少气”资源禀赋特点,决定了煤炭在我国能源结构中占主体地位[1]。 2016 年6 月,国家发展改革委和国家能源局能源技术革命创新行动计划(2016—2030 年)重点任务“重点煤矿区基本实现工作面无人化”。 2020 年2 月,国家八部委联合印发《关于加快煤矿智能化发展的指导意见》,意见要求到2021 年基本实现综采工作面少人或无人操作[2]。近年来,国内外知名学者和科研单位都在开展透明工作面智能开采大数据分析决策系统研究,包括大数据集群技术[3]、大数据融合技术[4]、规划截割模型数字化技术[5]、分析决策技术、机器学习技术[6]等,但这些技术均处于理论研究阶段,尚无成功应用的案例,因此,必须另辟蹊径采用新的技术路径来解决煤矿井下综采工作面动态复杂环境下及煤层变化不规律等条件下的智能精准开采问题。
我国对三维地质建模相关研究稍晚于国外,与国外的类似软件相比在功能稳定性、使用广泛性、软件易用性上存在一定差距,有待进一步探索和发展。尽管智能开采技术尚处于初级阶段,但随着国家政策的不断支持,智能化开采技术不断引领煤炭科技发展潮流,国内煤机制造企业纷纷进入智能开采技术和装备研究领域,取得了丰硕的研究成果。 目前我国学者在透明工作面智能开采大数据分析决策系统的相关研究如下:车德福等[7]利用GTP 广义三棱柱体元模型表达地质层间实体,建立应用于采矿领域的三维地质建模体系,在此基础上开发的Geo Mo3D 在动态建模、模型局部更新上取得较好效果。刘真等[8]通过Leading GIS 建立数字地质模型,实现海量地质数据的有效综合管理与利用。 曾新平[9]开发的三维石油勘探数据可视化软件SLGRAPH 具有动态可扩充性和复杂地质体建模解决方案。 陆斌等[10]对采煤机震源的地震波场、震源特征等进行了分析,并开展了初步的干涉成像处理。 程建远等[11]对槽波在煤层中的传播进行了数值模拟研究。 姬广忠等[12]发现受巷道影响,巷道壁上产生很强的巷道振型槽波,煤层中则出现了以Love 型为主的槽波,槽波能量不仅分布在基阶模式,高阶部分的能量也很强。 覃思等[13]开展了以掘进机做震源的随掘地震反射试验,并成功地提取出了来自巷道的反射波。程久龙[14]研究了随掘地震数据的去噪方法。 以往槽波地震勘探以炸药为震源,在高瓦斯、煤与瓦斯突出矿井施工受到限制,且每次施工都必须停止采掘,对正常生产活动有影响。 王国法[15]解析了综采工作面自动化、智能化和无人化的主要技术难题、制约因素及目前发展存在的主要问题,探讨了其发展方向和技术途径,并提出4 种煤矿智能化开采模式。葛世荣[16]提出智能化采煤装备的“三个感知、三个自适”技术架构,展望了其相关的关键技术研究。马宏伟[17]在煤矿综采设备故障智能诊断、煤矿巷道虚拟现实以及惯性导航技术等方面研究较深。 刘鹏等[18]提出一种以煤层震波层析成像探测信息为数据源,利用地学信息建模预先构建精细化的煤层顶底板数字高程模型,利用位姿测量系统,实时监测采煤机的位置和姿态,计算滚筒当前截割边界点,并与顶底板DEM 进行叠置分析,最终定量给出滚筒高度调整量值,从而实现采煤机滚筒高度的自动调整。笔者等[19]提出基于实时推进度监测的综采智能化工作面调斜控制技术,以及智能化无人开采适用性评价方法[20-21]和可视远程干预型智能化无人开采技术和自适应型智能化无人开采技术[22]。 马洪礼等[23]运用采煤机滚筒接触到不同煤层时截割电机负载及滚筒调高油缸前后腔压力变化的新型煤岩识别技术,记忆截割技术以及井下数据传输技术等。
因此,通过分析当前的地质建模技术和大数据装备水平现状,亟需突破新的技术,才能解决当前智能控制水平低、自主分析决策能力差等问题,不断提升智能化开采技术水平,实现智能化无人开采大数据自主决策分析。 笔者通过应用大数据融合技术、模型数字化技术、分析决策技术和机器学习技术,建立了一套可“预测、预判、预控”的智能开采大数据分析决策平台。 搭建了硬件环境和集群环境,规范了虚拟化集群的存储量指标,设计了大数据智能分析决策平台首页界面、地质数据界面、采煤机规划界面、电液控规划界面和采煤工艺界面等。
1 透明工作面模型建立
透明工作面模型是以真实的工作面为原型,以巷道精细测量、钻孔探测、槽波地震勘探等地质勘探技术[24]、计算机建模技术[25]和三维仿真[26]等技术为支撑,采集工作面异常构造、煤厚分布变化、煤层起伏、煤层顶底板、钻孔穿煤层顶底板位置等地质数据,对工作面开采过程进行监测、实现工作面开采过程的智能分析与决策。
为实现工作面地质透明化,必须构建具有一定精度的工作面煤层静态地质模型,其主要包括2 个方面:煤层空间展布形态及煤层厚度分布和异常地质构造。 前者可以为采煤机截割煤层提供地质导航,后者可以指导采矿计划和安全回采。
1.1 建模步骤流程
三维地质建模包括构造建模和属性建模2 个部分,对于目前发展阶段(用于智能工作面)构造模型即能达到需求。 构造建模分为数据收集、数据分析、模型构建3 个步骤,数据收集包括需要收集现有工作面有用的地质信息[27]。
1.1.1 地质资料分析
数据分析是建模工作的核心内容,需要根据收集的资料,进行地质条件分析,包括煤层起伏形态、断层发育情况、陷落柱存在情况、冲刷带展布和煤层分叉等多种煤层构造信息。
1.1.2 地质建模流程
三维地质建模(构造建模)是地质分析结果和地质研究的通过计算机软件综合展示。 具有全面、直观、立体的效果。
三维地质建模(工作面)通常包括以下7 个步骤[28]:①输入数据;②确定边界;③建立断层网格;④建立地层面;⑤建立线框模型;⑥划分网格;⑦模型的优化与展示。
1.2 模型动态更新
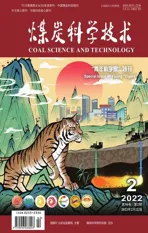
透明工作面模型精度是建模的重要影响因素,模型动态更新更是透明工作面智能开采的关键。 根据透明工作面模型数据梯级不同,建立的模型精度也会有一定的差别,因此,对于一号煤矿810 工作面采用梯级模型构建,即用不同的数据量建立不同梯级的模型。 目前,透明工作面模型梯级一共分为3级:第1 级是用进回风巷的数据、地面钻孔数据、开切眼写实数据进行模型的建立;第2 级是用进回风巷的数据、地面钻孔数据、开切眼写实数据、钻孔测量数据、槽波地震勘探数据进行模型的建立;第3 级是用进回风巷的数据、地面钻孔数据、开切眼写实数据、钻孔测量数据、更新写实数据、槽波地震勘探数据进行模型的建立。 透明工作面的三级梯度模型,如图1 所示。
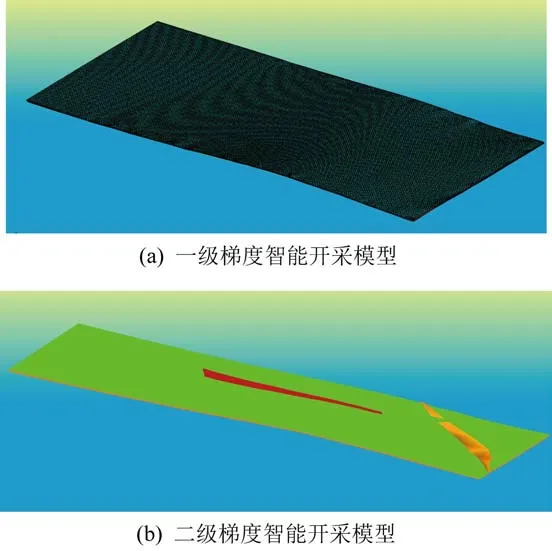
图1 透明工作面的三级梯度智能开采模型Fig.1 Three-level gradient intelligent mining model of transparent working face
2 智能开采大数据分析决策系统总体设计
大数据智能分析决策平台是智能开采的智慧“大脑”,是实现智能精准开采的关键。 通过研发IMS-P(Intelligent Master System-Platform)智慧矿山综采智能化管控平台,来实现对综采工作面不同设备的多种通信协议数据的统一、转换、关联、分类和存储,融合应用开采工艺和综采自动化控制技术、惯性导航技术和雷达测距技术来不断对透明地质模型和规划截割模型修正更新,分析得出综采设备精准控制决策信息。 由于当前智能开采系统的地质适应性及稳定性不足,提出了一种“CT”切片技术即根据截割计划将待开采工作面的煤层数字化模型进行剖切,然后根据煤层数字化模型的剖切面及智能化开采要求优化采煤机截割路径及参数,控制采煤机按照规划截割路径开采。 大数据智能分析决策平台系统架构如图2 所示。
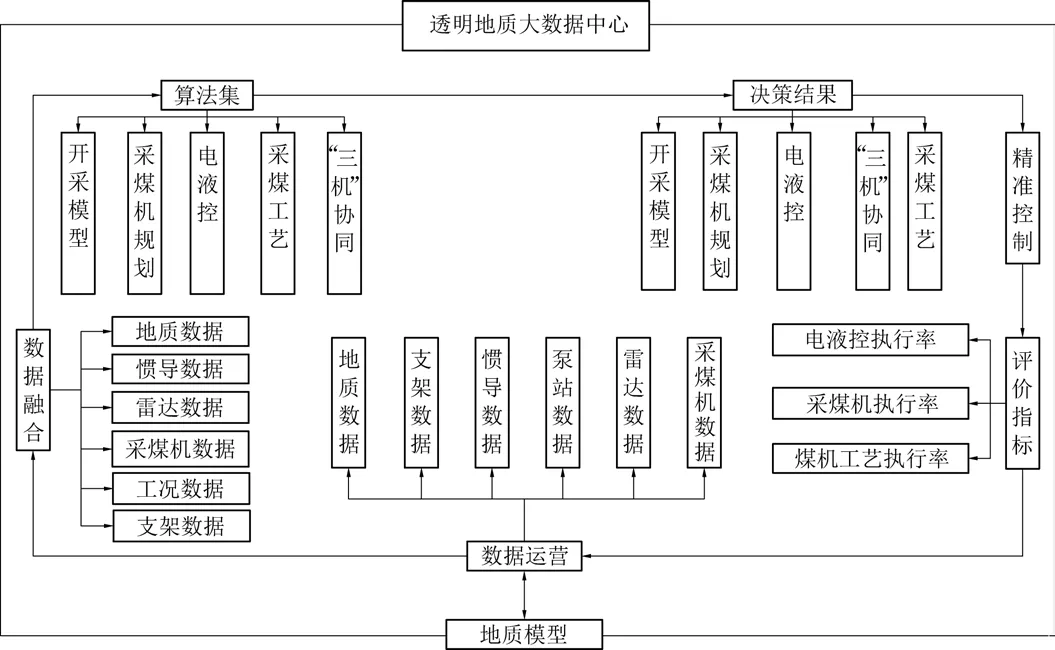
图2 大数据智能分析决策平台设计架构Fig.2 Big data intelligent analysis and decision-making platform design architecture
3 智能开采大数据分析决策系统平台建设
3.1 硬件环境搭建
3.1.1 硬件环境搭建
采用5 台SR650 运算服务器和1 台DE2000H存储服务器组成硬件设备集群,每台SR650 配置64 GB 内存3 条,18 核CUP 2 颗;存储服务器DE2000H 配置1.8 T 硬盘24 块,集群合计CUP:180核,硬盘容量:43.2 T,内存:990 G。 对服务器硬件设备集群进行网络环境搭建和WindowsServer2016 虚拟化平台部署,使用Vcenter 对虚拟化平台进行统一管理。
3.1.2 网络环境搭建
采用3 台Hadoop 集群虚拟机,3 台Spark 算法引擎虚拟机,3 台Web 应用虚拟机,1 台Nginx 反向代理虚拟机,7 台MySQL 数据库虚拟机组成。 物理主机和虚拟主机分别部署于通过VLAN 连接的192.168.18.70/80 和192.168.19.1/254 两个网段内。
3.2 集群环境搭建
3.2.1 集群分层搭建
大数据智能分析决策平台由展现层、通讯层、服务层和数据层组成。 其中展现层主要由可视化Web UL 大数据页面和RESTful 接口组成;通讯层由TCP/IP、Socket 和HTTP 协议组成;服务层主要由实时计算、业务集群和离线计算组成;数据层由Hive数据仓库、MySQL 集群、HDSF 和Redis 组成。 大数据平台设计架构如图3 所示。
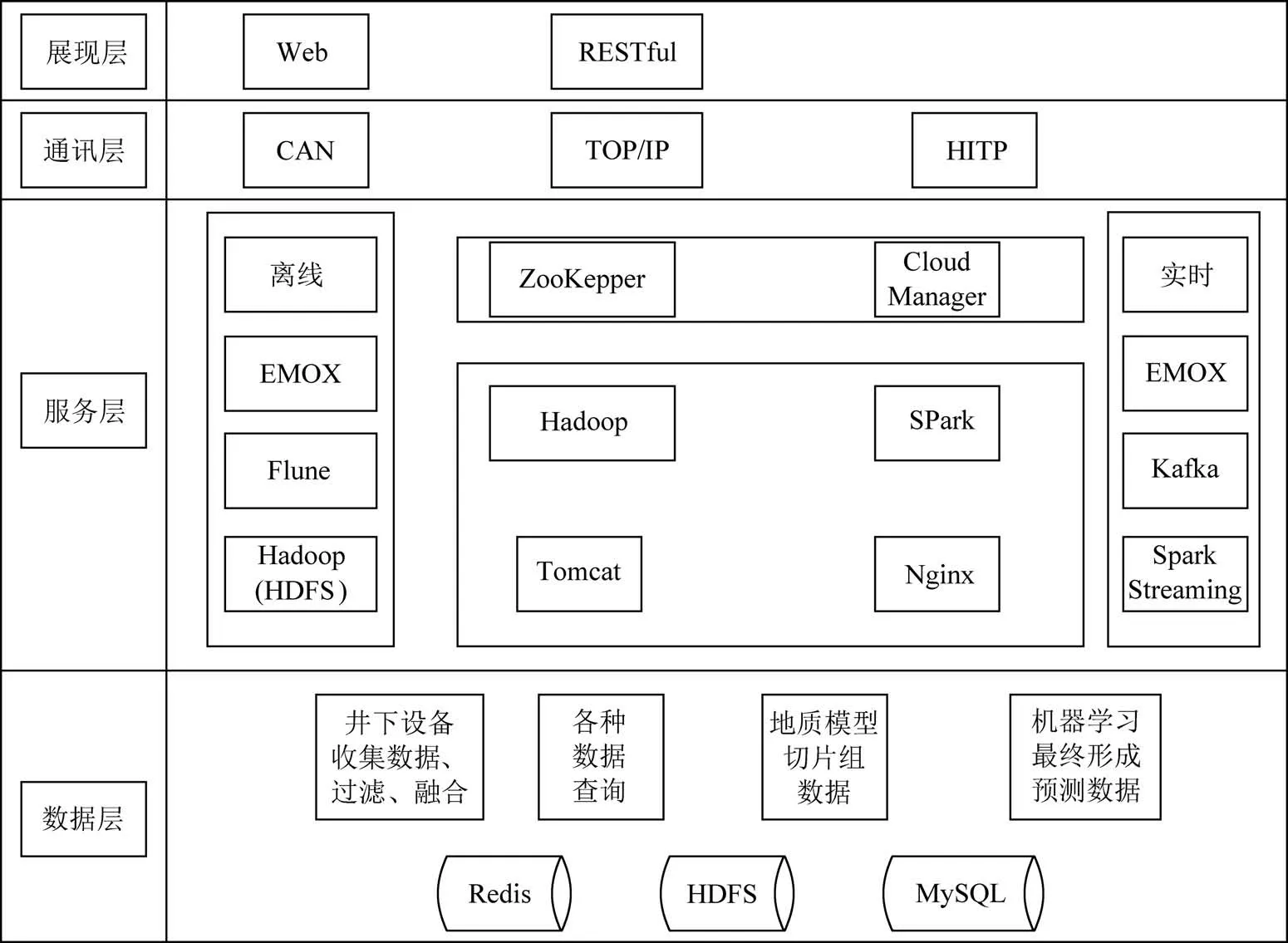
图3 大数据平台分层架构Fig.3 Layered architecture diagram of big data platform
3.2.2 大数据集群体系
所有大数据集群均部署于虚拟机环境下,采用Hadoop 的分布式集群架构方式。 使用HDFS(分布式文件系统)进行原始数据的储存,使用Spark 算法集群进行计算处理,使用Apache Hadoop YARN 调度器进行资源调度管理,使用Hive 工具创建数据仓库[29]。
集群3 层数据结构组成为:ADS(数据解析)原始数据层,DWD(细节数据层)结构化参数数据层,DWS(服务数据层)业务数据层。
使用Spark SQL(结构化数据处理模块) 将HDFS(分布式文件系统)中的原始数据进行计算处理。 使用Spark SQL(结构化数据处理模块)对透明地质“CT”切片数据、工况原始数据进行分解、清洗、过滤、数据格式转换后,写入到MySQL 数据库。
根据响应要求对数据流进行划分,实时部分:使用Kafka(分布式发布订阅消息系统)集群接收EMQ X(物联网技术)消息队列数据;离线部分:使用Flume(日志管理系统)采集EMQ X(物联网技术)消息队列数据存入HDFS(分布式文件系统)中。 使用Scala 语言编写的服务层体系架构将系统运行效率大幅提高,采用集群模式进行分表、分库的方法,解决大量数据查询效率低的问题。 系统的数据处理流程,如图4 所示。
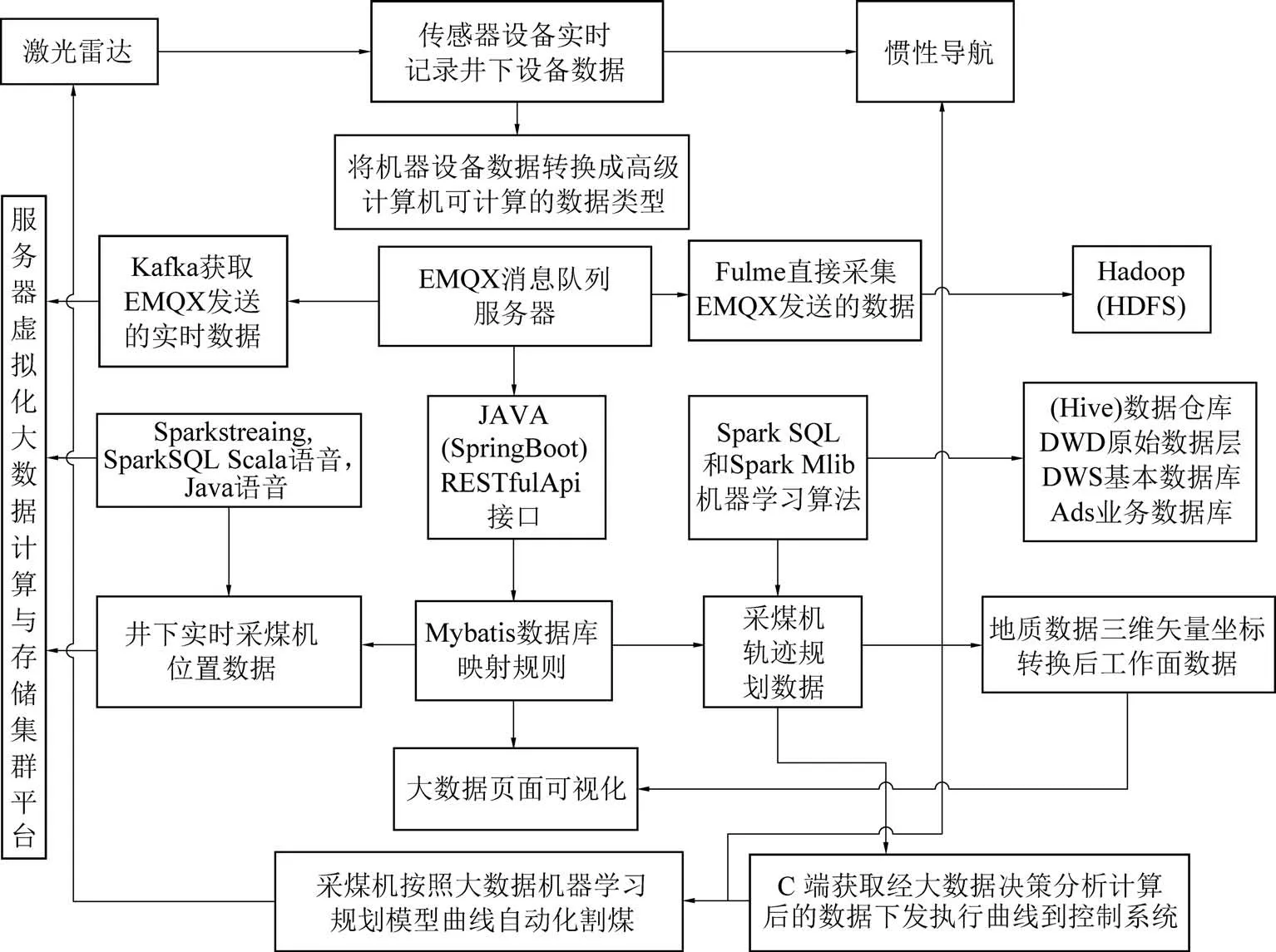
图4 数据处理流程Fig.4 Data processing flowchart
3.3 功能设计
3.3.1 大数据智能分析决策平台首页界面
大数据智能分析决策平台首页主要展示系统运行状态和结果集,主要展示内容如图5 所示。
图5 大数据首页界面Fig.5 Big data homepage interface
1)采煤工艺决策结果:决策选用的开采工艺信息,包括回采率、耗时等信息。
2)算法集:系统所使用的算法集组合。
3)决策结果:规划截割模型,“三机”协同策略、采煤工艺的结果展示。
4)执行率统计分析:规划截割模型的执行效果统计。
5)数据运营:ETL(数据仓库技术)数据运营机制下的系统数据吞吐量。
6)数据融合:多源异构数据的融合效率。
7)采煤机截割规划:采煤机规划截割执行率的统计分析。
3.3.2 地质数据界面
该界面主要展示透明地质模型“CT”切片数据的获取和解析、采煤机导航信息、工作面推进进程、地质环境变化的应对策略,主要展示内容如图6所示。
图6 地质数据界面Fig.6 Geological data interface
1)采煤机导航:展示采煤机在透明地质模型“CT”切片中的导航信息。
2)规划刀:展示地质环境变化的应对策略。
3)地质曲线:展示当前透明地质模型“CT”切片的信息。
4)煤机运行状态:采煤机速度、方向、姿态及位置监测信息。
5)透明地质模型“CT”切片更新进度:以进度条的方式,对透明地质模型“CT”切片更新进度进行展示。
3.3.3 采煤机规划界面
该界面主要展示采煤机规划模型及执行效果,主要展示内容如图7 所示。

图7 采煤机规划界面Fig.7 Shearer planning interface
1)倾角曲线:透明地质模型“CT”切片采样点倾角值、采煤机倾角测量值、惯性导航系统测量值比对结果。
2)俯仰角曲线:采煤机推进方向的2 组透明地质模型“CT”切片间俯仰角、采煤机俯仰角测量值、惯性导航系统测量值比对结果。
3)测量曲线:透明地质模型“CT”切片的高度值、采煤机采高挖底测量值、惯性导航系统底板高度测量曲线比对结果。
4)推进曲线:惯性导航系统测量的底板高度曲线和推进倾斜度测量展示。
5)采煤机规划截割曲线:加成角度调整、规划补偿、传感器定差补偿前后,采煤机规划截割曲线的结果比对。
6)截割曲线及地质和采高卧底曲线:比对系统拟合的采煤机实际截割曲线与惯性导航系统测量曲线、透明地质模型“CT”切片顶底板标高曲线。
7)干预分析:统计人为干预采煤机截割姿态、速度的频次。
3.3.4 电液控规划界面
该界面主要展示液压支架规划模型,主要展示内容如图8 所示。

图8 电液控规划界面Fig.8 Electro-hydraulic control planning interface
1)支架推进度及姿态测量值比对:展示透明地质模型“CT”切片的角度信息与惯性导航系统对俯仰角曲线,倾角曲线的测量值比对结果。
2)电液控跟机参数:预测的液压支架中部跟机参数模型的液压损耗与开采效能指标。
3)规划刀:展示规划的液压支架推移曲线。
4)推移行程:检测液压支架集推移传感器测量值。
5)测量、整定、验证刀推移曲线比对:比对验证刀、整定刀和测量刀的推移曲线。
6)上窜下滑:展示工作面上窜下滑的测量结果及修正策略。
3.3.5 采煤工艺界面
该页面主要展示规划截割工艺模型及负荷平衡调速参数设置及调整结果,主要展示内容如图9所示。

图9 采煤机工艺界面Fig.9 Shearer process interface
1)规划截割工艺段决策:展示选定的采煤机规划截割工艺段折返点信息。
2)规划截割工艺模型及效能预测:展示选定的规划截割工艺模型参数组,及预测的时耗和回采率指标。
3)规划截割的采煤机与液压支架协同模型展示:选定的规划截割“三机”协同模型可视化展示。
4)负荷平衡:监测运输“三机”运行负荷与开采速度。
5)运输负荷与截割速度关系:运输“三机”负荷与截割速度的比对展示。
6)调速效果监测:监测负荷调整策略的执行效果。
7)负荷平衡调整参数组:展示负荷平衡调整参数组。
4 智能开采大数据分析决策系统关键技术
4.1 大数据融合技术
工作面配套设备涉及的通信协议主要包括:CAN(采煤机、惯性导航)、TCP/IP(三机集控)、OPC(电液控)等。 针对工作面设备的传输协议各异问题,定制研发相关驱动和交互方法,实现多源数据的采集获取,使用数据融合模块进行数据的过滤、清洗、数据格式转换,通过Mqtt(数据发布/订阅传输协议)以及TCP/IP(传输控制协议/因特网互联协议)将数据流以json 字符串的形式发送,根据数据流标识将数据分类存储于HDFS(分布式文件系统)内。
4.2 模型数字化技术
基于“CT”切片技术对透明地质模型网格化,选择进风巷停采点处煤层底板作为基准零点,进行相对坐标传递,在相对坐标系中依据煤层顶底板、推进度、俯仰角等信息建立各设备的数据化开采模型。
4.2.1 采煤机规划截割模型
工作面采煤机规划截割模型主要包括采煤机基本状态信息和关联设备关系。 其中采煤机基本状态信息由采煤机运行状态、采煤机姿态传感器、采煤机编码器实际位移、采高、挖底值精准度和采煤机视频信息组成;关联设备主要包括支架、运输机和透明地质模型“CT”切片,采煤机规划截割模型,如图10所示。
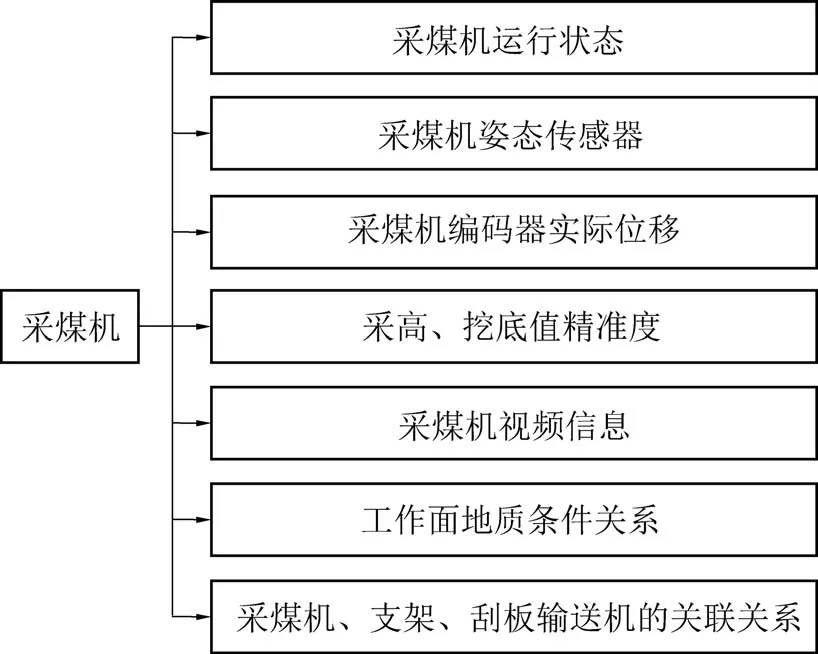
图10 采煤机规划截割模型Fig.10 Planning and cutting model of shearer
4.2.2 液压支架规划控制模型
液压支架规划控制模型主要包括支架信息和支架与其它关联设备的关系,其中支架信息由支架支护状态、支架姿态传感器、支架行程传感器和支架视频信息组成;关联设备主要是刮板输送机、采煤机,液压支架规划截割模型,如图11 所示。
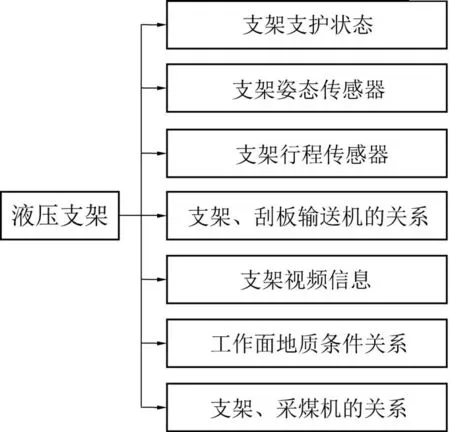
图11 液压支架规划模型Fig.11 Hydraulic support planning model
4.2.3 刮板输送机规划模型
刮板输送机规划模型主要包括刮板输送机基本状态信息和关联设备关系。 其中刮板输送机基本状态信息由平直度测量数据、刮板输送机俯仰角度、刮板输送机负载、刮板输送机电机运行数据和运输机视频信息组成;关联设备主要包括液压支架和采煤机、液压支架与刮板输送机的关系包括液压支架、刮板输送机推移位置和刮板输送机相对支架上窜下滑幅度,刮板输送机规划模型,如图12 所示。
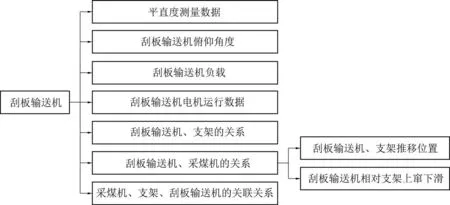
图12 刮板输送机规划模型Fig.12 Planning model of scraper conveyor
4.3 分析决策技术
研究规划截割工艺,建立开采效率和安全指标体系,根据开采效率和安全指标体系评定结果,训练规划截割工艺的参数组合,修正规划截割模型[30]。
1)工作面设备增强感知融合技术。 传感器作为工作面数据的主要采集器件,它的精确度直接影响平台的决策结果精度和设备执行的控制精准度。矿用井下传感器受到环境影响,普遍存在测量精度不高问题。 通过历史数据迭代训练,实时对传感器监测数据进行过滤、补偿、更新。
2)规划截割模型修正技术。 通过对比规划截割模型与执行结果的差值,实时反馈到大数据智能分析决策中心,利用执行效果评价体系和数据挖掘技术,对透明地质模型“CT”切片数据精度、角度转换修正精度、工况导航位置精度、机械特性定差准确度、人工干预的学习修正准确度进行偏差原因分析,适时修正规划截割模型,修正后再次下发验证,直至偏差消失。
4.4 机器学习技术
机器学习技术是利用计算机语言表述的算法逻辑让机器自主学习、不断进步的一种技术。 通过对采煤机的工况监测数据和预期规划数据进行学习分析,利用数学算法实现数据的修正和更新。
4.5 设备故障自诊断技术
综采工作面设备故障诊断系统是基于电流信号、润滑油信息、冷却系统信息等多信息融合的故障智能诊断技术,形成一套面向不同综采设备故障在线诊断系统,实现采煤机及主要设备的故障诊断,提供维护和运行策略建议。
5 工业性试验
5.1 试验工作面基本情况
810 智能化综采工作面位于井田八盘区西翼,北邻812 进风巷(正在掘进);西接八盘区辅助运输大巷;南为808 工作面采空区;东为井田边界。 工作面上覆地表为低山林区,沟壑纵横。 工作面可采长度为1 950 m,宽度为261 m,煤层厚度为1.3 ~3.0 m,平均厚度为2.72 m,可采储量为167 万t。 810 进风巷为工作面辅助运输及进风巷,北侧为812 进风巷,812 回风巷为工作面主运输及回风巷,靠工作面外侧为实体煤柱,内侧布置带式输送机。
5.2 工作面现场试验情况
1)2020 年3 月18 日至4 月30 日试验情况。对810 工作面进行巷道精细测量、钻孔测量、槽波地震勘探。
2)2020 年5 月20 日至6 月20 日试验情况。810 综采工作面开始使用精准控制中心实现工作面设备的“规划启停”与集中控制,大数据智能分析决策中心结合透明地质模型“CT”切片形成规划截割模型,实现了工作面中部采煤机按照大数据智能分析决策中心下发的截割模型进行自主截割。
3)2020 年6 月20 日至7 月20 日试验情况。2020 年6 月20 日至7 月20 日,810 综采工作面三角煤区域可实现自主规划截割与机架协同控制功能,实现了采煤机全工作面规划截割采煤工艺的完整执行。
4)2020 年7 月20 日至8 月20 日试验情况。2020 年7 月20 日至8 月20 日,实现采煤机全工作面规划截割采煤工艺的高效自主执行,雷达测距的实时精准测距指导透明地质模型数据实时更新,惯性导航的稳定运行实现了工作面设备的精确定位,大数据智能分析决策中心根据惯导数据及支架推移行程实现工作面刮板运输机的自动找直。
5.3 工作面运行数据分析
通过收集工作面开采7 月17 日调试的实际截割数据、地质规划数据、人工干预数据,得到实际截割曲线、规划截割曲线和实际煤层曲线对比图[31],如图13 所示。
从图13 可以发现,规划数据与实际截割数据基本相符,能够实现规划数据对采煤机动作的指导。
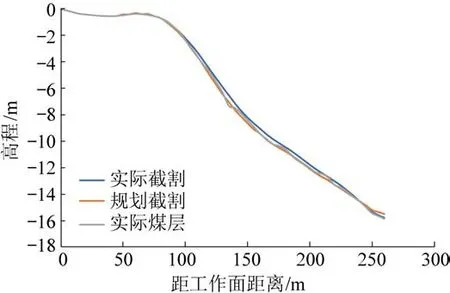
图13 实际截割曲线、规划截割曲线和实际煤层曲线对比Fig.13 Comparison of actual cutting curve,planned cutting curve and actual coal seam curve
6 结 论
1)通过应用巷道精细测量、钻孔探测、槽波地震勘探等技术,对地质数据进行收集和分析,建立了透明工作面三级智能开采模型,构建了透明工作面智能开采大数据分析决策系统总体设计架构。
2)实现了采煤机、电液控、刮板输送机在透明工作面模型中实时显示设备工况数据,基于大数据融合技术、模型数字化技术、分析决策技术和机器学习技术,构建了一套安全、高效、智能的大数据智能分析决策中心。
3)建立了采煤机、支架等设备三维模型坐标。传递并更新透明地质三维模型,实现了利用大数据分析决策技术对截割模型进行实时修正,保证了透明工作面的智能精准开采。