天问一号探测器高动态着陆惯导系统设计与试验
2022-03-25徐李佳王晓磊冯士伟刘旺旺李茂登王云鹏黄翔宇
徐李佳,王晓磊,冯士伟,赵 宇,林 松,刘旺旺,李茂登,2,郝 策,王云鹏,黄翔宇,2
(1.北京控制工程研究所,北京 100094;2.空间智能控制技术重点实验室,北京 100094)
0 引 言
中国首次火星探测任务,要求通过一次发射实现火星环绕、着陆和巡视。天问一号火星探测器的进入舱在着陆过程中,利用其先进的制导、导航与控制(Guidance, navigation and control, GNC)技术,实现对进入舱自身姿态、位置和速度的控制以及提供展开配平翼、展开降落伞、抛除背罩、抛除大底、展开着陆腿等关键事件的触发条件。在各国的火星着陆任务中,惯导系统都是GNC技术中的关键组成部分,其性能的好坏直接影响着陆任务的成败,如2016年欧空局的“夏帕雷利”(Schiaparelli)火星探测器着陆失败的原因就与其惯导系统有很大的关系。
火星存在稀薄大气,因此着陆方案与中国月球探测任务不同,天问一号探测器利用火星大气阻力进行气动减速,另外还采用了盘缝带降落伞来进行二次减速。基于系统方案设计,进入舱需在超声速条件下展开降落伞,过程中进入舱将受到巨大的冲击和晃动,甚至在某些特定条件下,降落伞会出现喘振现象,导致进入舱的本体角速度达到800(°)/s以上。
为确保中国首次火星探测任务圆满成功,需充分考虑各类不确定因素,使系统具有很强的鲁棒性。针对上文提到的开伞时的高动态工况,天问一号探测器研发了一套高动态着陆惯导系统,在设计上对硬件产品、使用时序和导航算法三方面内容进行了研究,以适应火星进入下降和着陆(Entry, descent and landing, EDL)过程中的动态环境。
在型号研制过程中,设计了全物理的火箭弹高空开伞试验,以验证天问一号探测器高动态着陆惯导系统在真实开伞工况下的导航性能,确保在实际火星着陆任务中惯导系统可以满足各项技术指标,圆满实现中国首次火星表面软着陆。
1 高动态着陆惯导系统的使用
天问一号探测器由环绕器和着陆巡视器组成,着陆巡视器又由进入舱和火星车组成,进入舱设计有特定的气动外形。在进入舱与环绕器分离之后,火星EDL过程主要分为气动减速、伞降减速和动力减速三个阶段,如图1所示。

图1 进入舱EDL过程示意图
在气动减速阶段,进入舱利用其气动外形,将进入大气时约4.8 km/s的速度快速下降至1.8附近。在此过程中,进入舱需要通过其惯导系统提供实时的姿态、位置和速度,然后根据控制律和制导律对进入舱的姿态和航迹进行控制。
在伞降减速阶段,进入舱在1.8附近弹出降落伞,并在超声速条件下展开盘缝带构型的降落伞,利用火星稀薄大气,最终将进入舱速度稳定到60 m/s附近。在弹伞和开伞过程中,进入舱会受到较大的冲击,并产生晃动。在某些特殊情况下,降落伞产生的喘振效应会造成进入舱剧烈晃动。面对如此高动态的环境,进入舱的惯导系统仍需在该条件下导航计算出正确的姿态和速度。
在动力减速阶段,进入舱抛除降落伞,由7500 N反推发动机进行减速,最终软着陆于火星表面。在此过程中,惯导系统需提供进入舱实时的姿态信息,由于软着陆对于位置和速度的要求较高,因此惯导系统需与测距测速类敏感器联合使用,得到修正后的高精度位置和速度。
综上所述,天问一号探测器的高动态着陆惯导系统在火星EDL过程中全程工作,特别是在测距测速信息引入前,惯导系统无任何外界修正信息,仅靠自身敏感的角速度和加速度,递推出进入舱实时的姿态、位置和速度。若导航的姿态、位置和速度与真实的姿态、位置和速度误差较大,将无法对进入舱实施有效的控制,甚至可能造成姿态的失控,或者对展开配平翼、展开降落伞等关键事件进行错误触发。若出现这些状况,则很可能直接造成着陆任务的失败。
2 高动态着陆惯导系统的设计
2.1 产品设计
天问一号探测器高动态着陆惯导系统由大量程惯性测量单元(Inertial measurement unit, IMU)和进入下降控制单元(Entry and descent control unit, EDCU)组成,下面给出硬件产品的相关设计。
1)大量程惯性测量单元
惯导系统的核心敏感器为IMU,为适应火星EDL过程中的高动态环境,要求IMU量程必须满足使用需求。为此,天问一号探测器研制了一款大量程IMU,由IMU组合件和IMU线路盒组成,IMU组合件中包含3个大量程光纤陀螺和3个大量程石英加速度计。其中,光纤陀螺的基本公式为:

(1)
式中:为所选光源的波长;为光的传播速度;为光纤环长度;为光纤环直径,通过内部电路检测萨格纳克(Sagnac)效应下光波的相位差Δ,则可计算出陀螺敏感的角速度。可以看出,针对可检测的最大相位差Δ,光纤环长度越短,可敏感的最大角速度越大,即光纤环越短,陀螺量程越大;针对可检测的最小相位差Δ,光纤环长度越短,能分辨出的角速度越粗糙,即光纤环越短,陀螺测量精度越差。
为适应火星EDL中的高动态环境,天问一号探测器的大量程IMU通过缩短光纤环的长度来满足高动态所需的陀螺量程,但是带来了测量精度下降的问题。
2)进入下降控制单元
惯导系统的原理是利用IMU数据进行导航计算,天问一号探测器高动态着陆惯导系统中配置了一台高性能星载计算机EDCU。EDCU为IMU线路盒提供一次电源和通信接口,IMU线路盒与IMU组合件之间通过内部互联电缆进行二次供电和通信。EDCU获取IMU中陀螺和加计的输出脉冲,经过数据处理后用于导航计算,得到进入舱实时的姿态、位置和速度。
2.2 时序设计
天问一号探测器高动态着陆惯导系统中的IMU为适应大量程的需求而损失了一定的测量精度。为此,通过在使用时序上进行优化设计,以提高惯导系统导航的精度。
根据产品特性,大量程IMU输出的是单位时间内的陀螺脉冲数和加计脉冲数,角速度和加速度的计算公式为:
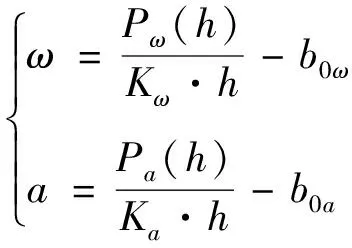
(2)
式中:()和()分别为陀螺和加计在一个采样周期内输出的脉冲数(∧);0和0分别为陀螺和加计的零偏;和分别为陀螺和加计的标度因数;和为IMU敏感的角速度和加速度。从式(2)中可以看出,在高动态情况下,采样周期越小,()和()更接近真实值,则角速度和加速度的计算结果更为准确。但是,考虑到实际产品的硬件特性,若小到一定程度,将会带来较大的数字量化误差,使计算的角速度和加速度精度下降。
因此,在大量程IMU产品特性已确定的情况下,天问一号探测器高动态着陆惯导系统进行了采样时序和导航时序的设计,具体方法为:
1)考虑产品硬件特性,设计最优的IMU采样频率,选择在一个控制周期内采集8拍IMU数据,即:
=8
用于提高动态环境下角速度和加速度计算的准确度;
2)在EDCU的实时操作系统中采用1个控制周期内进行2次导航计算的方法,即:
=2
式中:为导航周期,通过缩短导航周期,从而提高导航精度。
天问一号探测器高动态着陆惯导系统的时序关系如图2所示。
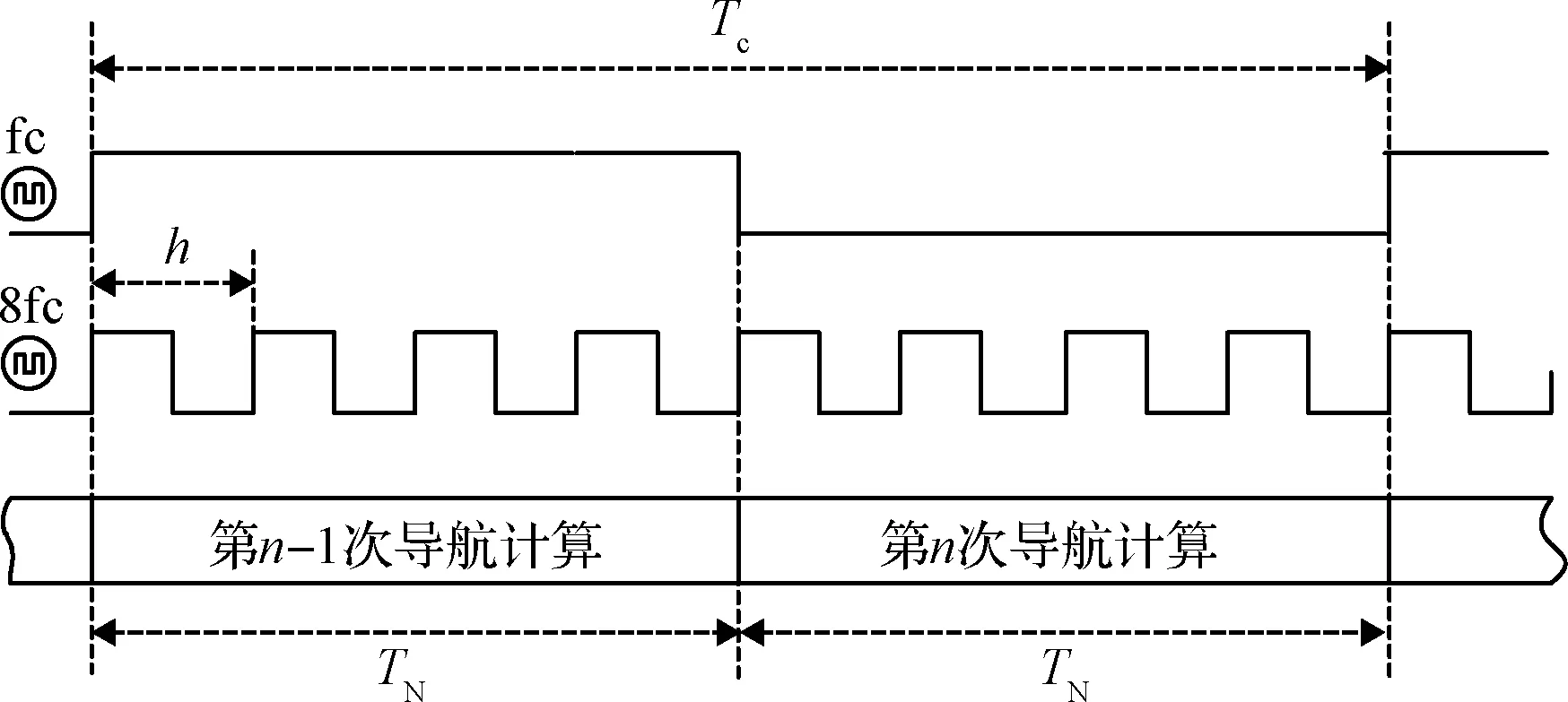
图2 高动态着陆惯导系统时序设计
2.3 算法设计
基于产品设计和时序设计,为进一步提高惯导系统在高动态环境下的导航性能,对IMU的数据处理方法和动态导航算法上进行了设计。
1)全温全动态数据处理方法
由式(2)可以看出,标度因数与陀螺输出的角速度有直接关系。经IMU温箱标定试验数据表明,标度因数与光纤环温度和角速度存在非线性关系,即:
=((),)
(3)
式中:()为光纤环实时的温度。图3给出了标度因数与温度和角速度的关系。
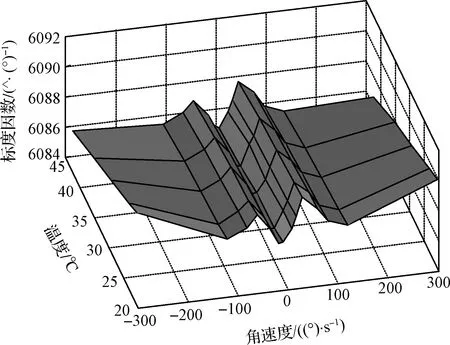
图3 标度因数随温度和角速度变化曲线
天问一号探测器的进入舱在EDL过程中,温度和角速度变化较大,为此在系统使用上对标度因数进行了如下全温全动态补偿设计:

(4)

2)高动态导航算法
在导航算法方面,考虑到EDL过程中动态很大,根据文献[10]中理论,采用多子样算法相比单子样算法更适用于高动态的情况。同时,结合高动态着陆惯导系统的时序设计,即在每个控制周期内进行2次导航计算,每次导航计算使用4拍IMU数据。因此,设计高动态导航算法如下。
在1个导航周期=+1-内,进入舱姿态变化为:
+1=⊗
(5)
式中:+1和分别为+1时刻和时刻的姿态四元数,为[,+1]时间段内的姿态变化四元数,可表示为:

(6)
式中:为旋转矢量,为更好地适应大角速度变化,采用导航周期内的4拍IMU陀螺数据,即[,+],[+,+2],[+2,+3]和[+3,+1]的角度增量计算旋转矢量,详见文献[11]。
在位置和速度的导航计算中,为适应高动态环境,对旋转效应和划桨效应进行了补偿,得到:

Δ)+I,)
(7)

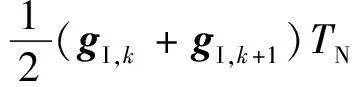
(8)
式中:+1和分别为+1时刻和时刻的位置;+1和分别为+1时刻和时刻的速度;I,为惯性系下的引力加速度矢量;为惯性系到进入舱机械系的姿态矩阵,由姿态四元数转换得到;Δ、Δ和Δ分别为导航周期内的累计视速度增量、旋转效应补偿项和划桨效应补偿项,由导航周期内的4拍IMU加计数据计算得到,详见文献[11]。
3 高动态着陆惯导系统试验
鉴于高动态着陆惯导系统在天问一号任务中的重要性,且经理论分析,进入舱在着陆过程中超声速开伞时产生的动态最大。为此,型号在研制过程中设计了火箭弹高空开伞试验,模拟火星EDL过程中的开伞工况,验证在稀薄大气环境下降落伞的开伞特性,以及实际开伞条件下天问一号高动态着陆惯导系统的性能。
1)飞行程序
高动态着陆惯导试验系统安装在火箭弹箭头尾部的载荷舱内。通过发射火箭弹将参试系统运至高空,箭头在与箭体分离后,当满足超声速、低密度、低动压的开伞条件时,由弹伞筒弹射出火星盘缝带降落伞,推开弹伞筒筒盖,降落伞充气、张满直至稳定减速,最后携箭头落回靶场,飞行程序示意图如图4所示。
图4 火箭弹高空开伞试验示意图
2)试验系统
高动态着陆惯导试验系统和降落伞弹伞筒均安装在火箭弹载荷舱内的结构上。着陆惯导试验系统由IMU组合件、IMU线路盒、数据处理单元和电池供电单元组成,其中IMU组合件与IMU线路盒由互联电缆连接,数据处理单元用于模拟EDCU向IMU线路盒提供同步信号,并与IMU线路盒进行通信和数据记录,IMU和数据处理单元由电池供电单元提供一次电源。整个着陆惯导试验系统为自闭环系统,如图5所示。
图5 着陆惯导试验系统
3)试验流程
(1)火箭弹发射前,通过地检设备对着陆惯导试验系统进行确认测试;
(2)合上上电开关,电池供电单元为IMU和数据处理单元提供一次电源,数据处理单元模拟EDCU与IMU进行通信,并记录所有采集的IMU数据;
(3)火箭弹发射升空至箭头着陆,全程由数据处理单元记录IMU数据;
(4)回收箭头,导出存储在数据处理单元中的数据,进行导航性能评价。
4)试验结果
火箭弹从发射到着陆整个飞行时间约为26.6 min,开伞时合成角速度最大约为133(°)/s,合成加速度最大超8,箭头触地时加速度超18,整个试验飞行过程动态较大。
为验证文中提出的天问一号探测器高动态着陆惯导系统在时序和算法方面设计的优越性,下面对比如下设计:①=,即一个控制周期内仅进行一次导航计算;②=4,即一个控制周期内采用4拍IMU数据;③取常值,不进行全温全动态标度因数补偿;④ 采用单子样导航算法。图6所示为火箭弹高空开伞试验的姿态导航曲线,采用本文设计方法得到导航的终端姿态误差为1.183°,而对比设计的终端姿态误差为2.211°,可见本文设计方法的导航姿态误差明显优于对比设计。由于在实际EDL过程中开伞时导航的速度信息更为关键,因此试验中给出了导航的速度,并对比了箭头上GPS给出的速度,如图7所示。在火箭弹飞行23 min 时,GPS给出的速度为14.26 m/s,本文设计方法导航的速度为30.26 m/s,对比设计方法为91.89 m/s,可见本文设计方法得到导航的速度更接近GPS给出的速度。由于此次导航时间较长,若折算到实际火星EDL的9 min以内,则导航精度满足使用需求。可以看出,本文设计的高动态着陆惯导系统更能满足开伞时的高动态工况。图8所示为火箭弹高空开伞过程中监视相机拍摄的真实开伞图像。
图6 高空开伞试验姿态曲线
图7 高空开伞试验速度曲线

图8 高空开伞真实图像
4 结 论
高动态惯导系统在中国卫星研制领域的研究和应用尚属首次,基于中国首次火星探测任务需求,研发了天问一号探测器高动态着陆惯导系统,从硬件产品、使用时序到星上算法,均针对高动态条件进行了设计。通过火箭弹高空开伞试验,验证了其导航性能,并对比其他的时序和算法设计,表明了该惯导系统在高动态条件下的优越性。
2021年5月15日,天问一号探测器成功软着陆于火星北半球的乌托邦平原南端,其高动态着陆惯导系统在轨表现完美,实现了0.1°以内的着陆姿态误差和1.4 km的着陆区精度。
