天问一号探测器软着陆触火关机策略设计
2022-03-25赵晓涛李茂登王云鹏徐李佳黄翔宇刘旺旺
郝 策,赵 宇,赵晓涛,李茂登,2,王云鹏,徐李佳,黄翔宇,2,徐 超,2,张 琳,刘旺旺
(1.北京控制工程研究所,北京 100094;2.空间智能控制技术重点实验室,北京 100094)
0 引 言
2021年5月15日,天问一号探测器成功着陆火星表面,我国成为继美国以外,第二个成功着陆火星的国家。火星探测器包含环绕器和着陆巡视器,通过一次任务成功实现“绕”、“着”、“巡”三大目标。到目前为止,人类进行火星探测任务的成功率仅有50%左右,其中大部分失败在进入、下降和着陆(Entry, descent and landing, EDL)阶段。
目前火星探测器末级减速制动主要通过发动机反推减速,若发动机关机不及时,变推力发动机的羽流与火星表面之间作用,产生向上和水平方向推力,影响着陆巡视器着陆稳定性。发动机关机时间过早,着陆巡视器的姿态、速度控制不到位,将有硬着陆的风险。这就决定了发动机关机时间在很大程度上影响了着陆任务的成败,发动机关机策略至关重要。
目前的发动机关机模式主要有两种:非0高度关机模式和触地关机模式。嫦娥三号探测器和阿波罗探测器采用非0高度关机模式着陆月球表面。嫦娥三号利用伽玛关机敏感器得到高度信息,在距离月面3 m左右时,发出发动机关机指令,然后着陆器以自由落体的方式着陆到月面。采用非0高度关机模式能减少发动机羽流造成的影响。但火星土壤机械特性与月球有所差别,火星羽流对着陆缓冲机构上的热远小于月球羽流热。同时,火星表面的气流变化剧烈,火星着陆巡视器在EDL过程中受到水平和垂直气流的影响。采用自由落体的着陆方式,着陆巡视器极有可能出现翻转情况,无法保证着陆的稳定性和安全性,同时不能满足高精度着陆姿态要求。
“凤凰号”火星探测器着陆腿敏感到一定大小的冲击力时,触发触地敏感器,继而执行发动机关机序列,设计在60 ms内完成发动机关机。该方法以触地敏感器触发作为执行发动机关机时序的前提条件,未充分考虑触地敏感器极限故障模式,可能出现发动机关机时序不能正常执行的情况。
为了确保天问一号探测器EDL过程中,着陆巡视器能够高可靠安全着陆火星表面。本文提出了一种自主高容错触火关机策略,通过加权评分策略以及故障工况下的多信息重组技术,创新地设计软着陆事件的在线决策方法。基于事件触发的发动机关机时序,减轻了7500 N变推力发动机长时间作用对着陆巡视器着陆稳定性的消极影响。
1 软着陆在线决策
天问一号探测器与运载火箭分离后,将经历地火转移和环绕(模式1:巡航模式)阶段,环绕器和着陆巡视器分离后,着陆巡视器进入模式2:分离滑行模式和模式3:进入准备模式,建立大气进入姿态,然后自主完成模式4:攻角配平模式、模式5:升力控制模式、模式6:伞降模式、模式7:动力减速模式、模式8:悬停模式、模式9:避障机动模式、模式10:缓速下降模式和模式11:无控模式,该过程涉及多个火工品控起爆,如配平翼展开、降落伞开伞、抛大底和抛背罩等,火工品起爆引起的振动极易造成触地敏感器误触发的情况。基于该问题,对着陆巡视器着陆事件的自主决策以及触火信息自主故障诊断和处理提出了更高要求。
1.1 软着陆决策模型
本文将软着陆过程划分为感知模块、诊断处理模块和决策模块三个部分。通过感知模块输出4路触火开关的状态、4条着陆腿的健康系数、着陆巡视器的工作模式,距火面高度以及时钟采集时间。随后将、和输入到诊断处理模块,利用EDL过程中自主故障诊断功能,以加权评分方法得到4路触火开关的可靠性评价。最后,由决策模块输出着陆巡视器软着陆触火状态。整个信息流如图1所示。
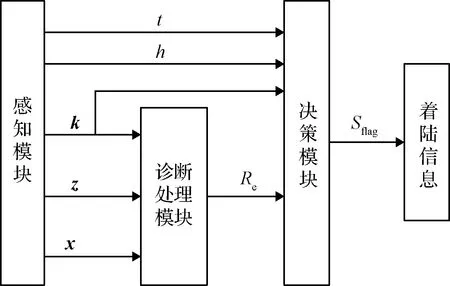
图1 软着陆在线决策逻辑
1.2 诊断处理模块设计
为避免EDL过程中由于两器分离、展开配平翼、弹伞、抛大底和抛背罩等火工品起爆造成触火信号误触发情况,导致任务失败。着陆巡视器控制计算机在模式(除模式10和模式11)初始将每路触火信号恢复成未触发状态,记录模式切换前触火状态,。在着陆巡视器工作模式约束条件下,利用加权评分策略对触火开关的可用性进行量化分析:
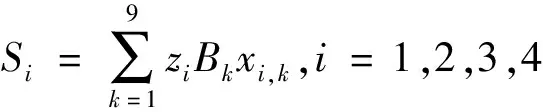
(1)
式中:为第路触火开关的可靠性评分;为触火敏感器健康状态,与在轨自检结果和自检次数有关;为模式下的加权系数,与工作模式和着陆巡视器在轨动作有关;,为模式下第路触火开关状态。
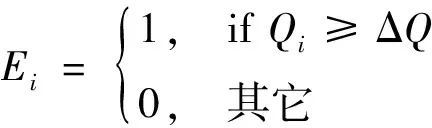
在模式10初始对4路触火开关进行加权评分,得到4路触火开关的可靠性评价。同时实时采集4路触火信号状态记为,10,根据4路触火开关状态和可靠性评分得到有效的触火开关信息和触火开关个数:
=,10
(2)
(3)
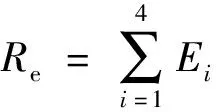
(4)
tou=,10
(5)
式中:为触火开关状态品质;为触火信号可用标志;1表示触火信号有效;0表示触火信号无效;Δ为触发信号有效阈值;tou为触火开关信息,1表示触火开关闭合,0表示触火开关断开。
1.3 决策模块设计
决策模块根据得到的触火开关可靠性评价和触火开关信号,自主选择最优的软着陆触发策略,最终输出着陆巡视器的触火状态信息。本文基于触火信号、加速度信息以及高精度导航数据,设计了3种触发策略。
触火信号在诊断处理模块进行了详细分析,下面介绍加速度以及时间触发策略。
1)冲击加速度
火星着陆巡视器在软着陆冲击过程中,足垫与火星表面之间的相互作用主要分为三个阶段:冲击接触、滑移和静止。本文选取冲击接触阶段垂向冲击的加速度值作为分析研究的目标。
着陆巡视器与火面接触时,通常以一个小加速度软着陆于火面,因此着陆巡视器受到的力分别为:接触力、自身的重力、小加速度产生的外力,通过微分方程可表示为:

(6)

采用Bekker提出的压力下陷理论,向上的应力与撞击坑深度的关系可表示为:
(7)
式中:为着陆巡视器单位面积受到的应力大小;为内聚系数;为摩擦因数;为足垫半径;为变形指数,假设=1。
由式(6)和式(7)得到着陆巡视器的微分方程表达式为:

(8)
利用相关地面试验数据和火星土壤的性能参数研究在冲击速度分别为0.9 m/s、1.5 m/s、2.1 m/s工况下的加速度变化情况。
图2描述了冲击速度与冲击加速度的关系,随着冲击速度增大,加速度峰值随之增加。整个冲击过程一般在0.1~0.4 s完成。表1统计了0.1~0.4 s时间内不同速度下的加速度,可以看出,加速度变化范围集中在(-16 m/s,-6 m/s)。本文设定一个加速度阈值,当加速度小于该阈值时,即可认定其满足着陆的条件之一。加速度阈值的选择需要综合考虑加速度计的采样周期、着陆巡视器缓速下降段的加速度变化范围和安全裕度。阈值选择的太小,由于采样频率出现数据缺少,极有可能未采集到满足条件的数据。阈值选择的太大,易出现在缓速下降段满足条件的情况,造成误判问题。缓速下降段加速度范围为(-5 m/s,-3 m/s),安全裕度设为1.2。综上,加速度阈值为=-6 m/s。
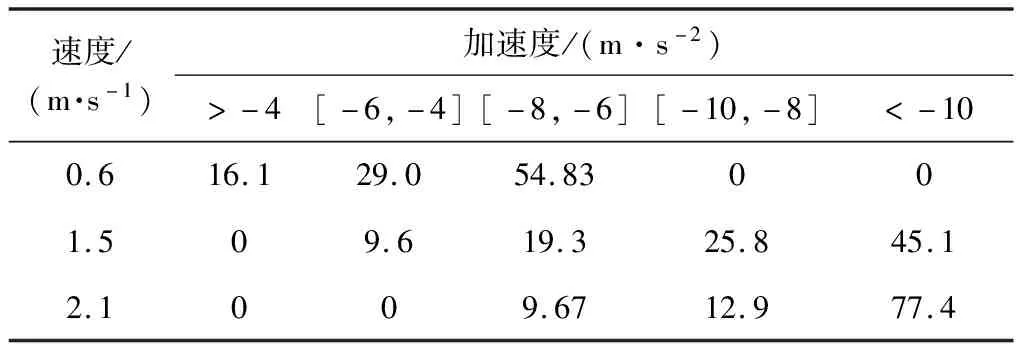
表1 不同速度下冲击加速度百分比
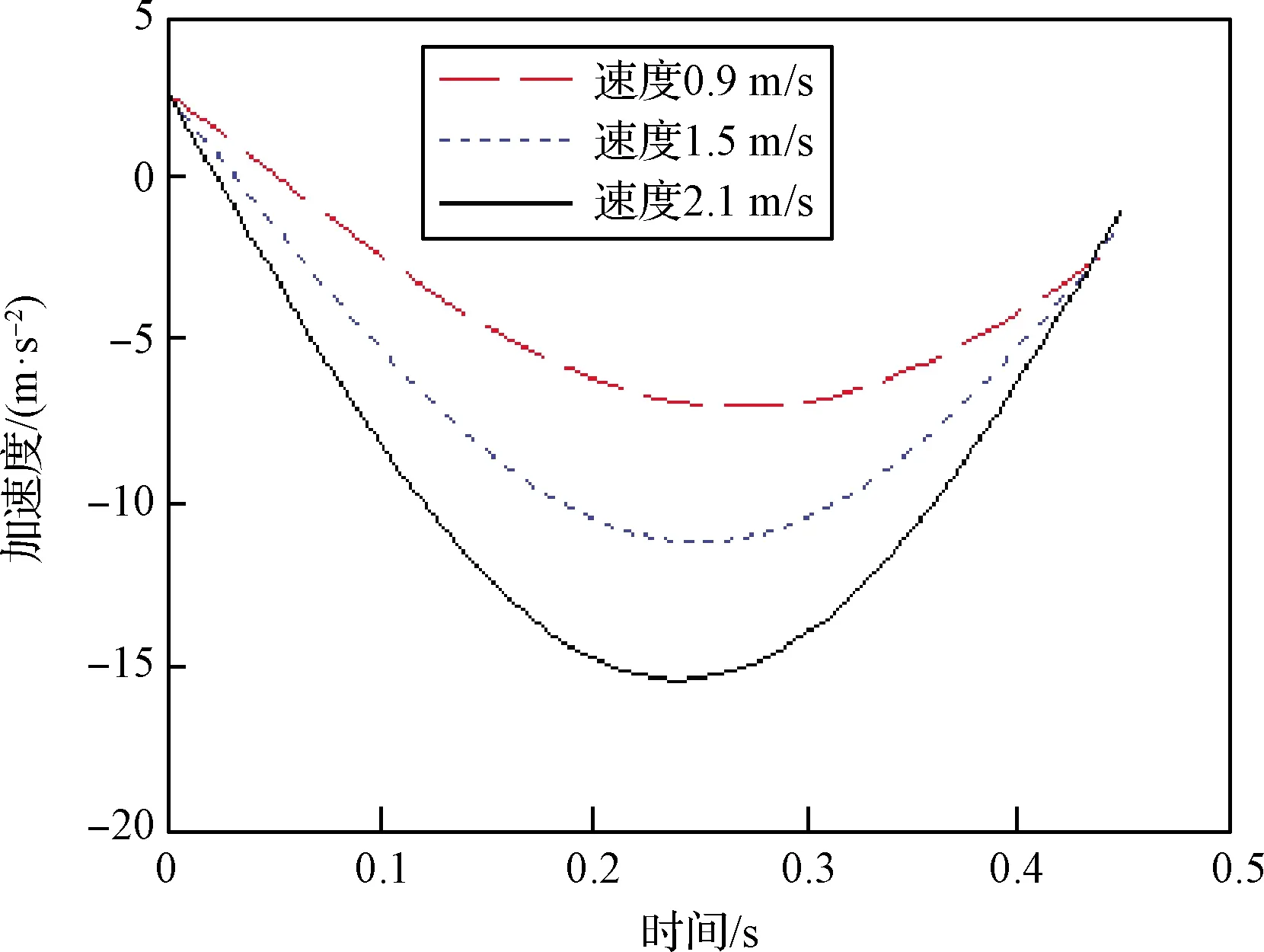
图2 不同垂向速度下的加速度变化曲线
2)时间触发
在触火信号均失效的极端故障工况,采用高精度导航高度和时间累计构成了一种具有双重保护的触发条件。判断方式如下:在导航高度小于(为模式10缓速下降的初始高度)时,利用测距测速敏感器采集的垂向速度和高度实时修正惯导,提高导航精度。当测距测速敏感器测量高度为时,计时器计时,记录时间,同时采集导航垂向速度和加速度计采集合成的加速度。当满足如下条件时,即判定火星着陆巡视器着陆。
>且<
(9)
式中:为保护高度,取为10 m,为时间阈值。
.火星着陆巡视器着陆火星表面时速度为0 m/s。
在假设1成立的条件下,与时间的关系可表示为:

(10)
在着陆巡视器缓速下降阶段,通常以目标加速度作为制导目标,但考虑到发动机推力控制精度,避免出现着陆巡视器向上运动的情况。本节设计了一个随时间变化的小加速度,提高着陆巡视器下降过程的安全性。最终通过式(10)得到时间阈值。
基于以上3种信息,考虑故障工况下的多信息重组,本文设计的触火事件的自主决策方案如图3所示。
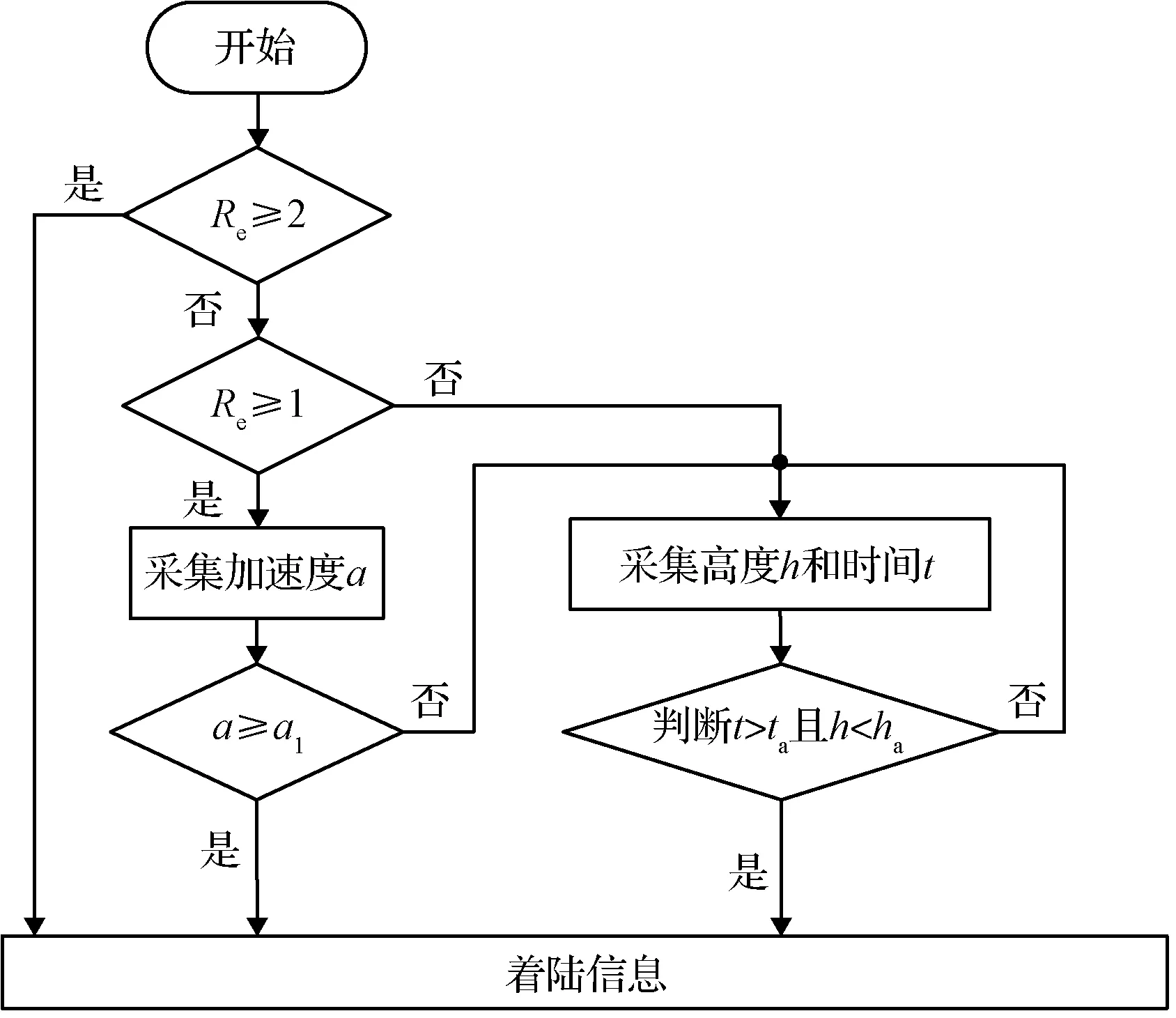
图3 触火状态在线决策实施方案
着陆巡视器每条着陆腿有3对触发开关,地面经过了大量试验和在轨验证,可靠性较高。因此将触火开关信号作为首要判断条件。考虑到在轨环境的不确定性以及极端工况,设计了两种备份策略。
为防止由于EDL过程中加速度小于加速度阈值,误认为着陆巡视器触火的情况。在加速度触发条件中增加了至少1路触火开关信号有效的判断,极大提高了该策略的可靠性和安全性。但着陆巡视器与火面发生冲击时,容易出现加速度计数据异常现象,因此在4路触火开关均失效或者加速度计异常的极端情况下,设计了基于时间的触发策略。备份策略相对触火信号触发方案,具有一定的时间滞后。
通过多冗余备份的触火策略自主决策方案,能高可靠高安全的在最短时间输出着陆巡视器触火状态,进而执行后续的触火关机时序。
2 软着陆触火关机时序设计
着陆巡视器触火后,需要发送7500 N发动机关机指令。既要保证关机时间足够短,同样也要保证关机动作执行的可靠性。基于以上要求,本文提出了一种基于事件触发的7500 N发动机关机时序控制策略,如图4所示。该时序将着陆事件触发作为起始时间,按照触火信号触发时刻、加速度冲击触发时刻以及时间触发时刻优先级顺序,选择某一触发时刻作为触火关机时序执行的起点。25 ms后连续发送7500 N发动机关机指令,直至发动机在时刻收到该指令。然后7500 N发动机进行阀门关闭,执行时间为。最后,发动机完成关机。整个关机过程在40~537 ms完成。

图4 软着陆触火关机时序
考虑到地火距离较远,星地通讯存在一定的风险,因此,着陆巡视器GNC分系统连续512 ms持续发送7500 N变推力发动机关机指令,在检测到发动机收到该指令时,停止发送指令。该方案确保了7500 N发动机触火时间发生后短时间内关机,降低了作用时长对软着陆稳定性的消极影响。
3 软着陆触火关机策略校验
针对本文设计的触火关机策略分别进行了地面试验验证和在轨数据验证分析。
3.1 地面试验验证
为了综合验证触火关机策略的正确性,在河北怀来进行了触火关机专题验证试验。采用塔架吊挂的方案来模拟火星低重力的方案,塔架与着陆巡视器间采用钢丝绳连接,吊绳上的拉力保持恒定,从而模拟着陆过程中火星重力环境。地面试验主要对触火开关触发和加速度触发策略进行了点火试验验证。
..触地开关触发
着陆巡视器触地开关均为未触发状态,起始高度为70 m,发动机的推力范围约为900~3500 N。着陆巡视器经历悬停模式、避障机动模式、缓速下降模式最终着陆至石灰地面。
图5、图6和图8以触地信号触发前一拍作为时间起点,描述了触地过程中加速度计采集合成的速度、加速度以及触火信号个数变化过程。触火信号采集周期与加速度计采样周期不同。由图5和图6可以看出,着陆巡视器触地前一直向下运动,在采集到触地信号后,由于着陆于石灰地面,出现了约0.04 s的弹跳,然后减速,最终着陆巡视器处于稳定状态,加速度计采集合成的速度和加速度分别稳定于0 m/s和火星表面重力加速度g附近,整个冲击过程约0.25 s。图7可以看出在触地事件触发后,发动机推力减小至0,完成发动机关机。
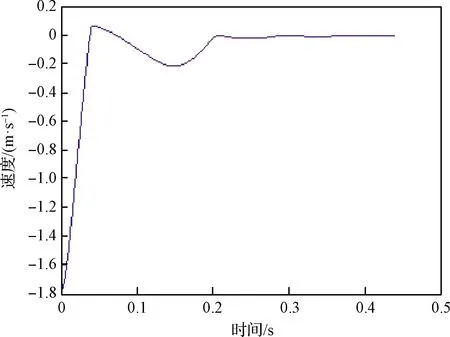
图5 垂向速度变化示意图
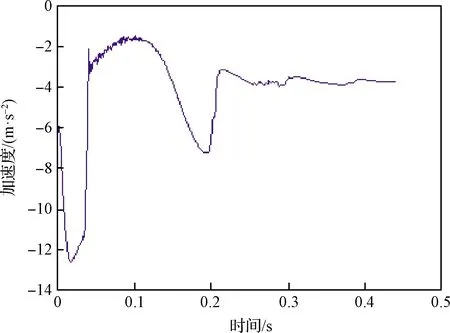
图6 垂向加速度变化示意图
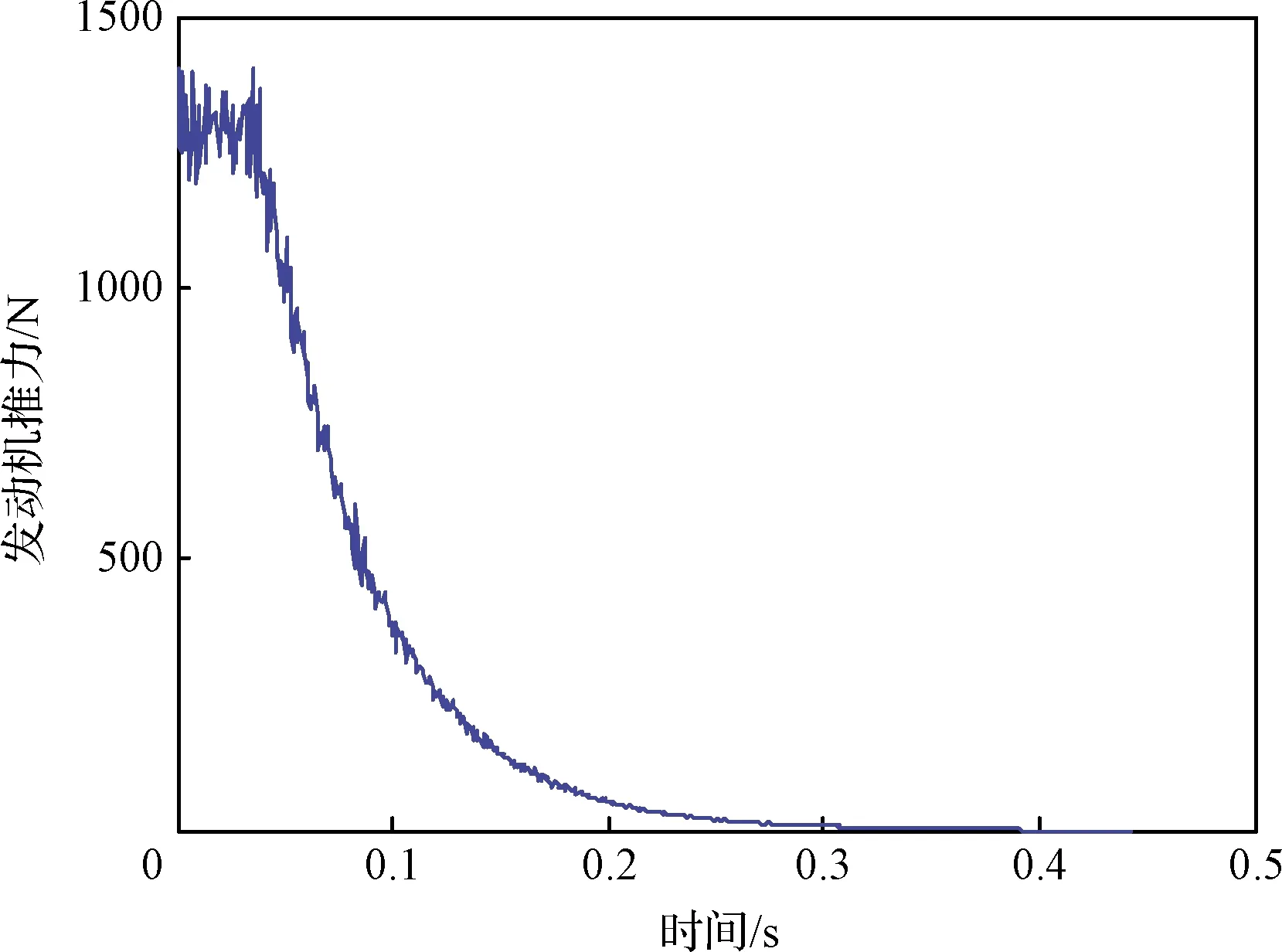
图7 发动机推力变化示意图
图8 触火信号的变化示意图
综上,地面试验验证了基于触火开关触发的发动机关机策略的有效性。
..加速度计触发
地面设定星上软件屏蔽触地信号触发策略。着陆巡视器从起始高度70 m,经历悬停模式、避障机动模式、缓速下降模式,最终着陆至石灰地面。
导航速度与前面试验基本一致,不受该工况影响,这里不进行重复描述。通过对比图9和图6以及图10和图7发现,发动机关机时间比触地开关触发试验长,触地信号有效后约300 ms完成了发动机关机。
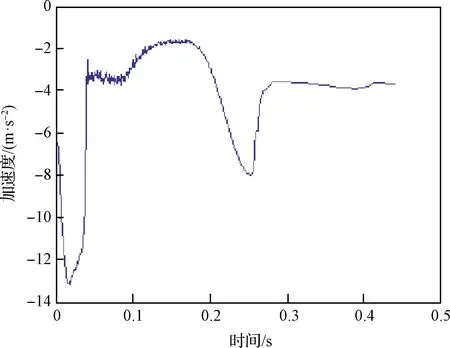
图9 垂向加速度变化示意图

图10 发动机推力变化示意图
综上,地面试验验证了基于加速度触发的发动机关机策略的有效性。
..在轨数据分析
天问一号着陆巡视器触火过程与地面验证基本一致。由在轨数据可以发现,4路触火信号同时触发,着陆巡视器与重力方向夹角为0.001°,可以判断火星着陆巡视器触火姿态稳定。通过分析着陆巡视器的合成加速度和速度,发现触地关机过程中未出现着陆巡视器向上弹跳的情况,加速度计合成加速度最终稳定在火星重力加速度附近,垂直速度稳定在0 m/s附近,导航垂直高度为0.886 m(着陆腿高度)。综上可知,着陆巡视器7500 N发动机关机正常,天问一号探测器成功着陆,进一步验证了本文触火关机策略的有效性。
4 结 论
本文对天问一号探测器触火关机策略进行了研究分析,结合触火信号、加速度信息以及高精度导航数据信息设计了3种触火策略,实现了软着陆自主决策,提高了软着陆事件触发的可靠性和安全性。利用优化的触火关机时序,以着陆事件为触发条件,通过优化关机时序,实现了触火关机动作执行的高效性和自主性。通过地面试验和在轨结果,验证了触火关机策略的有效性。
