基于MATLAB在砂芯夹持器系统中的稳定性分析
2022-03-25

林显新 叶城保
摘 要:发动机铸件生产过程中,砂芯模型采用工业机器人转配,受机械振动,夹持压力,加减速等外部干扰因素导致砂芯出现裂痕,影响后续铸铁质量,本文通过构建夹持器系统的数学模型,通过串联夹持压力测量环节,形成闭环反馈系统,进而分析系统的输出响应,最终获得较优控制系统。
关键词:MATLAB 夹持器 稳定性 工业机器人
1 引言
随着智能制造产业的转型升级,“机器换人”已成为未来发展主攻方向。发动机生产车间铸造工段的废气、粉尘、噪声和振动严重影响着现场生产人员的身心健康,采用工业机器人进行物料搬运、组装有利于提高生产效率[1]。由于发动机铸铁采用砂芯模型进行铁水浇铸,砂芯模型的质量对发动机质量起着至关重要的作用。砂芯采用树脂与三乙胺凝固而成,硬度不高,使用工业机器人进行搬运、装配等会出现夹不稳或者夹裂等问题。本文以工业机器人夹持器系统为研究对象,分析其输出响应的稳定性。
2 夹持系统现状分析
2.1 搭建夹持系统的数学模型
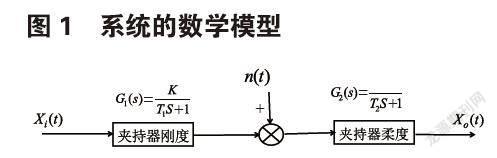
装配砂芯的工业机器人夹持系统采用柔度与硬度对半的夹持器,夹持器背面采用铝合金板保证夹持的刚度,夹持器接触面采用软性较好的橡胶,保证砂芯的夹持柔度。系统受夹持压力、机械振动和加减速运动等因素干扰。根据系统各环节因素,构建夹持器系统,如图1所示。
计算刚度环节系数K受结构压力与形变相关(K=P/),砂型重量约为6Kg,夹持面形变约0.5mm,即K为120N/mm,柔度环节λ受夹持器长度、接触面和压杆系数影响(λ=μl/i),其中μ为压杆长度系数0.7,l为夹持器长度12cm,i为接触面长度1.5cm,因此λ=5.6,当外界干扰信号为单位脉冲函数N(t)=δ(t)时,对函数Laplace反变换得N(s)=1[1]。
夹持器中刚度环节传递函数为G1(s)。
式(1)中,T1为惯性环节的时间常数(T1≥0)。
夹持器柔度环节的传递函数为G2(s)。
式(2)中,T2为惯性环节的时间常数T2≥0。
式(1)、(2)作为一阶惯性环节,当T1=T2=1s时,系统前向通道的开环传递函数为Gk(s)=G1*G2,求出Gk(s)。
2.2 开环夹持系统的响应
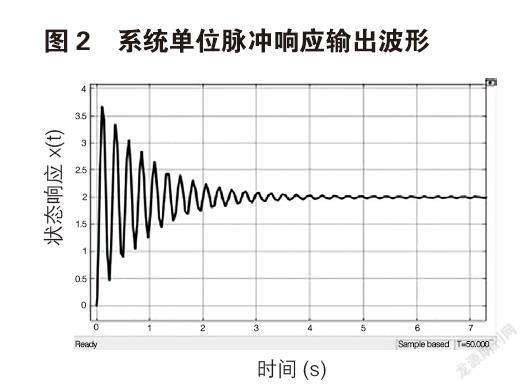
若系统输入信号与干扰信号均为单位脉冲时,将Gk(s)通过Matlab/Simulink对系统模型进行仿真分析,系统在干扰冲击作用下,系统响应输出波形如图2所示。
由仿真结果可知,系统在受到外界干扰的情况下,出现振荡,超调量为σ=85%,系统受外界干扰冲击影响较大,而正是由于系统振荡导致镂空砂芯受力不均匀而出现裂痕,给后面铸铁浇铸带来很大的废品率。因此需要通过增加夹持器压力检测反馈环节,减少干扰导致的振荡,降低系统超调量σ。
3 系统优化控制
3.1 增加压力测量反馈环节
在原来夹持系统的基础上,增加气压测量反馈环节,形成闭环控制,如图3所示。
假设外界干扰因素为单位脉冲函数N(t)=δ(t)时,对应函数Laplace反变换得N(s)=1,测量反馈环节为单位负反馈,H(s)=1,则闭环系统的传递函数为GB(s)。
3.2 闭环夹持系统的响应
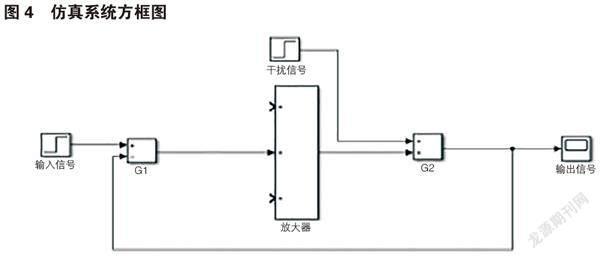
根据铸造中心工业机器人夹持器的工作原理、机械结构,考虑机械振动等干扰冲击因素,在夹持器末端串联一个气压检测环节,将检测信号反馈给工业机器人控制系统。在Matlab/Simulink中搭建一个闭环负反馈控制系统的数学模型[2-3],如图4所示。
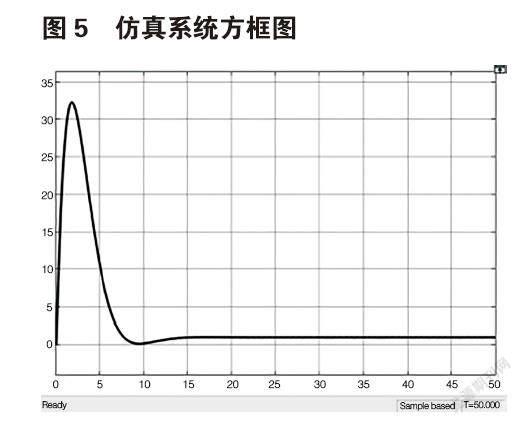
运行仿真,运行完毕后,双击示波器“Scope”,查看系统的响应输出,得到如图5所示的波形。
由仿真结果可知,系统只经历过一次振荡就趋于稳定,且输出较为平缓,输出响应明显好于开环系统。
4 结论
通过增加夹持系统的气压测量反馈环节,在夹持器执行末端串联一个电子气压表,用于检测夹持气压,当气压达到设定气压值时,输出一个脉冲信号给机器人,机器人通过实时检测该气压信号,用于控制氣路的接通与断开,进而较好的控制夹持器夹紧压力,保证砂芯的不被夹裂或者夹不稳等现象出现,进而保证了后续铸铁的质量,为制芯段采用工业机器人装配起到一定参考作用。
基金项目:2021年度广西高校中青年教师科研基础能力提升项目(2021KY1080):“铸造中心装配机器人柔性夹持器的研究与应用”。
参考文献:
[1]林显新,李国进,周世凯.基于Matlab的制芯机器人夹持器稳定性研究与分析[J].制造技术与机床,2020,(03):109-113.
[2]董言敏.工业机器人在智能制造中的应用分析[J].时代汽车,2021,No.363(15):14-15.
[3]于亚平.智能制造与机器人应用关键技术研究[J].时代汽车,2020,No.340(16):8-9.
[4]林显新,林德智,李玺. 关于铸造制芯段工业机器人稳定性的探讨[J]. 中国机械,2021(14).
[5]侯晓楠,杨尊熙.谈工业机器人在汽车制造领域的应用[J].时代汽车,2018,No.293(02):69-70.
[6]林显新. 铸造制芯段工业机器人夹具的应用设计[J]. 轻工科技,2017(2).
[7]李小伟.基于MATLAB的工业机器人运动学分析与仿真[J].内燃机与配件,2022(02):233-237.
