基于物联网和机器人技术的智慧停车系统设计
2022-03-25翟圃圃李晓龙隋永佳杨立强吴晖
翟圃圃 李晓龙 隋永佳 杨立强 吴晖

摘 要:近年来随着我国经济的快速发展和稳步转型,私家车的数量激增,随之即来的停车难、寻车难等问题日益凸显。基于此,系统主要对用户终端、机器人作业、传输网络等模块进行设计,将物联网与机器人技术进行有机结合,构建双向通信网络与智慧交通网络。通过机器人存取车实现车辆的自动存取,提高用户存取车的效率,进一步地实现智慧停车;同时物联网的应用实现了车位等信息的共享,为城市智慧化提供了一定的助力。
关键词:物联网 存取车机器人 自动化停车 智慧停车
1 引言
我国私家车的增长速度高于城市停车基础建设的速度,同时现有部分停车场存在车位利用率不高、空间利用不合理、车位指示不清等问题。随着人们追求智慧生活的意愿日益强烈,停车问题亟待解决。目前应用较广的解决思路主要有以下两条:一方面是改善停车场的结构,提高空间利用率。如各种新型立体停车场,但其仍存 在设备复杂,故障率高,高峰时段依次取车时间长等问题。另一方面是扩大停车基 础设施的建设规模,然而现存的资源是有 限的,以上方法不能从根本上解决部分停 车问题。
而随着科技的发展和各产业的有机衍生和多元结合,越来越多的产业实现交叉互联、互促互助,形成了良好的智能融合。同时机器人具有效率高、灵活度高的特点,其应用非常广泛。本系统提供的一种思路是利用物联网和机器人技术实现智慧停车。
系统采用嵌入式STM32处理器设计了机器人的智能控制终端;采用NB-IOT(窄带物联网)协议传输更新信息;在数据传输方面提出GPM-CNN,LP-CNN算法,实现云端和APP端的双向稳定的信息传输,用户只需在APP端进行操作就可完成一键存取车。自动存取车的显著特点之一就是提高了用户的存取车效率,帮助构建智慧出行体系,极大地方便了用户的生活。
2 系统设计概况
2.1 系统设计目标
基于物联网和机器人技术的智慧停车系统旨在提高车位的利用率和改善人们的存取车方式,帮助人们更好的管理停车场,合理节省资源。系统一方面利用物联网的高覆盖性和精准性收集车位信息,合理安排车位;另一方面扩大机器人技术的应用范围,借此实现自动化存取车、提高停车效率、实现智慧停车、为实现城市智能化提供一条可靠路径。
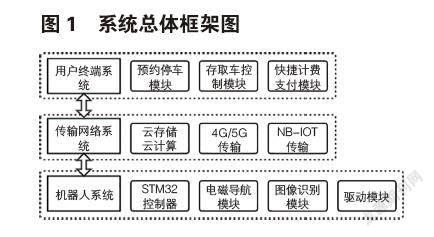
根据系统功能的完备性分析,该系统分为以下三个模块:
(1)用户终端系统。用户根据实名认证拥有唯一的注册登录账号,用以收发车位信息和存取车服务指令。通过APP端的快捷操作实现预约停车、实时存取车及快捷计费支付。(2)机器人系统。自主停车机器人采用嵌入式STM32处理器设计其智能控制终端,通过图像识别技术分析车牌信息,实现信息的感知。机器人由电能驱动,通过电磁引导技术进行定位,同时托轮器与机器人主体相互配合对车辆进行托举,提高运输的稳定性。(3)传输网络系统。该系统通过NB-IOT协议传输信息,采用GPM-CNN,LP-CNN算法,通过后台服务器的存储和大数据的计算实现云端与机器人和云端与用户终端的双向信息传输,构建立体的交通网络。
2.2 系统主要功能
(1)车位预约
用户可查询目标停车场的车位信息,根据自己的实际需要选择是否需要预约车位。在APP端预约车位后需在30分钟内到达,若超时未到则会被取消预约。车位被预约后云端向机器人端发送信息,被预约的车位限时内为“禁停区”,避免车辆误停造成混乱。
(2)自动存取车
系统采用“先到先服务”的原则,支持多台机器人同时工作,提高存取车效率。当车辆行驶至所述停车平台即机器人上方时, 气弹簧液压杆带动机器人车轮弹出,托起机 器人主体升高直至接触到车辆底盘,压力传 感器检测车辆底盘与机器人是否完全接触, 完全接触后托轮器伸出,蓄电池为滑块提供 动力带动托轮器在滑道上纵向移动,同侧托 轮器分别相向而行,卡住車轮,实现车轮的 稳定托举。最后机器人在处理器的控制下通过电磁引导技术进行定位。到达指定停车位时,托轮器松开车轮分别向两端运动,后收回嵌入机器人主体。气弹簧液压杆缩短降低机器人直至车轮完全接触地面,之后机器人退出完成停车。
取车时用户只需在APP端发送取车指令,机器人自动到达停车位以同样的方式取出车辆。
(3)智能快捷缴费
系统自机器人将车辆停到指定位置时开始计费,自机器人托举汽车离开停车位时停止计费。机器人的控制终端将停车时间及状态等信息上传至云服务器,最后在APP端实现自动缴费(图2)。
3 系统软件设计
移动端是提高系统便捷度的重要方法之一,用户在手机上可自主选择服务,存取车等服务仅需一个按键即可传送指令。目前移动端主要是基于Android Studio开发的Java语言系统。
APP端的主要结构如下图所示。用户管理模块实现用户的注册登录、实名认证等服务,该系统只为合法用户提供服务;车位信息模块用以查询用户目标停车场的车位状态;支付查询模块实现用户停车的智能缴费和历史记录;数据存储模块采用Java Script框架,完成后台数据的存储更新,及时与云端交换信息,完成信息更新。
4 系统硬件设计
4.1 自动存取车机器人
4.1.1 机器人主体
机器人未工作时呈矩形,整体长度为5.2米,宽度为1.25米。车轮和托轮器均处于收缩的状态,确保车辆能顺利驶到其上方,为托轮器的弹出工作提供足够的空间,提高系统的实用性。其纵向两侧设有滑道,使托轮器能顺利移动。整体外壳采用铝合金,具有一定的强度,经济性较好。
4.1.2 托轮装置
该装置由滑块、托轮器、电动液压杆组成。托轮器共有8个,分别安装于机器人主体最前端、最后端与中间对称线两侧。托轮器未工作时收缩嵌入到机器人侧面的凹槽内,工作时电动液压杆推动托轮器伸出,滑块在机器人两侧的滑道行进,带动托轮器运动。同侧的托轮器分别相向行进,两两组合,能完全卡住轮子,提高托举的稳定性。
4.1.3 机器人底盘
机器人底盘包括车轮、气弹簧液压杆、车轮嵌槽。车轮设有4个,未工作时半嵌入车轮嵌槽内,降低机器人的高度,确保车辆能顺利驶入机器人上方,避免对汽车底盘和机器人造成损伤。车轮底盘安装磁传感器带,运用电磁技术进行导航,提高其行进过程中的稳定性,降低成本。
4.2 图像识别模块
机器人装有Open mv摄像头,车辆驶来是进行拍摄采集信息,采集车牌信息后由图像处理模块进行识别存储,用于车辆的存取车及计费依据。车牌信息存储的同时在地区的智慧交通网实现共享,在必要情况下为公安等部门提供凭据。
4.3 智能控制终端
机器人的智能控制终端主要是采用嵌入式STM32处理器。将数据采集、处理、融合、挖掘等进行边缘计算,降低数据传输带宽占用,提高实时性。处理器与智能传输实现信息的实时更新,组成了智能化的控制终端。
5 结语
综上所述,部分停车问题的解决方法可向高速发展的智能技术投去目光,同时也依赖于我国科技的发展和各行各业的高质量发展,智慧停车系统的基础更是良好的产业互动和可持续的能量转化。本文设计的基于物联网的机器人技术的智慧停车系统具有一定的实用性,运用机器人为人们提供存取车服务,发达的物联网提高用户的存取车效率。该系统将智能化元素进一步地融入人们的生活,推动城市建设向智慧化迈进。
参考文献:
[1]张曼,陈宁. 基于安全认证的私家车位共享系统设计[J]. 现代信息科技,4(24):4.
[2]练云翔,王明瑞,张俊华.基于物聯网和大数据的城市道路智慧停车系统研究[J].电脑知识与技术,2021,17(20):150-152.
[3]王瑶,吴勇峰,郑宝红.一种基于物联网的车位实时共享系统设计[J].中国科技信息,2021(09):89-90.
[4]崔义森,张能,赵京,穆华倩,徐天天.立体车库自动存取车系统的优化设计[J].中国科技信息,2010(24):283-285.
[5]罗振军,张睿睿,宋子斌,马学思. 一种移动机器人自动存取系统[P]. 四川省:CN208906889U,2019-05-28.
[6]罗勤.智慧停车管理系统平台的创新应用与发展趋势[J].中国安防,2021(08):62-66.
[7]杨雪,刘涛.基于边缘计算的CNN图像分类系统设计[J].通信与信息技术,2021(04):38-41.
