基于计算机视觉的PET瓶回收识别算法
2022-03-24罗美辰于艳杰秦顺毕
罗美辰 于艳杰 罗 涛 秦顺毕 宿 艳
(哈尔滨学院,黑龙江 哈尔滨 150000)
PET瓶是饮料、矿泉水等食用液体外包装的重要形式,在食品市场有非常广泛的应用。不同食品企业为了体现自身产品与其他企业产品的差异,往往采用不同形状、不同体积的设计,从而形成形式各异的PET瓶[1]。如果使用完毕后直接丢弃PET瓶,就会污染环境[2]。因此,如果能够对PET瓶进行回收,不仅可以避免环境污染,还可以重复利用聚对苯二甲酸材料,产生相应的经济价值。考虑以废品回收形式的回收PET瓶需要大量的人工并且会增加回收成本,因此设计PET瓶智能回收装置具有较高的现实意义[3]。智能回收的关键在于区分PET瓶的形状和体积,从而将其放置到合理的回收容纳仓。因为回收过程是在完全无人值守的情况下进行的,所以就需要将这种辨识区分工作交给计算机。该文在计算机视觉技术的基础上构建PET瓶智能回收识别算法,并通过试验对算法进行验证。
1 基于滤波技术的PET瓶图像去噪处理
运用计算机视觉技术实现智能回收识别PET瓶的功能主要分为3个步骤:1) 对PET瓶图像进行去噪处理。2) 对PET瓶图像进行轮廓提取。3) 根据视觉算法计算出的PET形状、体积等指标并运用分类算法进行分类。
PET瓶智能回收装置上的摄像机拍摄PET瓶图像,但是在自然光条件和常规背景下,PET瓶图像会含有大量的噪声,例如椒盐噪声、随机噪声和高斯噪声等。因此,需要采取计算机视觉技术中的滤波算法去除噪声,主要的滤波算法有均值滤波算法、中值滤波算法以及高斯滤波算法。
均值滤波算法需要采用1个滤波窗口,然后用窗口内所有像素的灰度数值的平均值代替要处理的像素。该方法可以较好地处理随机噪声和椒盐噪声,如果窗口尺寸选取得不合理,就会导致图像模糊。因此,均值滤波除了要注意选择合理的窗口尺寸外,还要配合锐化技术消除模糊效应。
以1个3×3像素的平滑窗口为例,其进行均值处理的模板如图1所示,其数学处理模型如公式(1)所示。

图1 均值滤波中的3×3模板
式中:h(m,n)为滤波后的像素灰度;f(m,n)为原始像素灰度。
由图1可知,(m,n)就是待处理像素,这是一个以(m,n)为中心的3×3模板。可以根据均值滤波的原理计算(m,n)点的像素灰度(中值滤波就是用滤波窗口在图像平面内选取1个包括待处理像素的滤波区域,将区域内的所有像素值都按灰度的大小进行排列,然后用中间值代替待处理像素的灰度值),如公式(2)所示。
在数字图像的各类噪声中,大部分噪声都服从高斯分布,因此滤波处理中出现了专门的高斯滤波技术,这类去噪技术的数学模型如公式(3)所示。
式中:σ为表征高斯噪声的高斯系数,需要在使用过程中进行明确;x为横坐标;y为纵坐标。
将该滤波器作用于图像就可以完成高斯滤波,如公式(4)所示。
1幅带有椒盐噪声、随机噪声和高斯噪声的PET瓶图像如图2所示。

图2 带有椒盐噪声、随机噪声和高斯噪声的PET瓶图像
采用计算机视觉技术中的3种滤波算法对图2中的PET瓶图像进行处理后,得到的去噪图像如图3所示。

图3 计算机视觉技术滤波后的PET瓶图像
由图3可知,经过3种滤波处理后,有效去除了PET瓶图像上的椒盐噪声、随机噪声和高斯噪声。
2 基于边缘检测技术的PET瓶轮廓提取
在滤波去噪的PET瓶图像上,为了提取PET瓶的轮廓,需要采用计算机视觉技术中的边缘检测算法。常见的有Robert边缘检测算法、Sobel边缘检测算法以及边缘检测算法等。
Robert边缘检测算子是典型的梯度检测算子。梯度算子就是求一阶导数的数学模型。以连续的数学函数f(x,y)为例,它在(x,y)这一点的梯度如公式(5)所示。
式中:f为像素灰度函数;x为像素横坐标;y为像素纵坐标;Gx为像素水平梯度;Gy为像素垂直梯度。
梯度的方向角度一般都指向f在(x,y)的最大变化处。因此,在求取梯度的过程中,每个像素点都成为偏导数求取的执行位置。为了便于实现这种计算,经常采用不同的卷积模版,使用模版可以简化偏导数的计算过程,因此也产生了不同形式的边缘检测方法。
Sobel边缘检测方法的基础也是梯度算子。其实施的过程中融合了滤波去噪处理,而且Sobel模板分别从水平方向和垂直方向执行边缘检测。也就是说,这个边缘检测的梯度算子是分成了2个方向的梯度算子。在这2个算子中,X方向的算子对垂直边缘的检测效果更好,Y方向的算子对水平边缘的检测效果更好。Sobel模版2个方向的边缘检测模板如图4所示。

图4 Sobel边缘检测算法使用的模板
与基于梯度算子的边缘检测方法相比,Canny边缘检测方法是一种全新的方法。Canny边缘检测方法的依据如下:首先,抑制图像中的噪声,以便为边缘特征的精确定位奠定基础。其次,构建最优定位测度算子,实现对图像信噪比进行检测和定位操作的目标。最后,采用拉普拉斯算子,先进行平滑处理,再进行求导数运算,从而提取边缘。
Canny边缘检测的一般执行步骤如下:1) 使用高斯滤波器及其对应的模板执行卷积操作,消除图像中的固有噪声。2) 使用偏导数求取算子来搜索原始图像中沿X方向和Y方向的2个偏导(Gx,Gy),从而计算各点的梯度数值。3) 在第二步得出的梯度数值的基础上,进一步求取各个梯度的方向。4) 在第三步计算出的梯度方向的基础上,对各个梯度进行大致分类,即水平方向、垂直方向、45°方向以及135°方向。经过这一步的处理,所有的梯度方向都可以获得其隶属的方向区域。5) 在整幅图像中去除伪边缘特征,也就是那些在梯度方向上灰度差距并不大的边缘特征。6) 通过2个阈值来判断真正边缘特征的位置。2个阈值的大小有差别,当被判断处的灰度差异大于较大的阈值时,这一点是明确的边缘特征;当被判断处的灰度差异小于较小的阈值时,这一点一定不是边缘特征;当被判断处的灰度差异介于高、低阈值之间时,还不能明确这一点是否为边缘特征,需要进一步判断,即判断该点像素的邻域像素中是否存在大于高阈值的点,如果存在,那么该点为边缘,如果不存在,那么该点不是边缘。
该文采用Canny边缘检测算法对PET瓶图像进行轮廓提取,根据图3得到的滤波去噪后的PET瓶图像执行Canny边缘检测,得到的PET瓶轮廓如图5所示。
由图5可知,经过Canny边缘检测算法的处理可以获得PET瓶清晰、完整的轮廓,并且这种轮廓是单像素的,不存在伪边缘特征,可以计算PET瓶的体积和形状,从而进行分类识别。

图5 计算机视觉技术Canny边缘检测后的PET瓶图像
3 基于Bayes算法的PET瓶分类识别及试验
在通过计算机视觉技术获得PET瓶的准确轮廓后,可以根据边界像素位置计算得到PET瓶的形状和体积信息。
从实现原理来看,Bayes算法属于一种归纳推理方法,它根据一定的先验知识和后验知识,再结合统计学的原理完成分类推断。因此,在Bayes算法中,基于先验知识的先验分布概率和基于后验知识的后验分布概率是非常重要的。先验概率分布函数是在总体分布基础上建立的概率分布,因此历史数据信息的积累和分析对Bayes算法的执行、准确的推理和判断具有重要价值。后验概率分布函数依赖后引入的数据信息、未知特征的提取和分析,这也是Bayes算法能够获得准确分类结果的保障。
基于计算机视觉算法和Bayes分类算法对不同形状体积的PET瓶进行分类识别试验,结果见表1。
由表1可知,该分类识别试验一共选择了9种(50 mL、100 mL、125 mL、330 mL、500 mL、600 mL、1.0 L、2.0 L以及2.5 L)不同体积形状的PET瓶,每种PET瓶的数量均为1000个。500 mL、2.5 L PET瓶的识别准确率全部为100%,100 mL PET瓶的识别率最低,但是也达到了99%。这充分表明该文采用的计算机视觉技术和Bayes分类技术的有效性,也为PET瓶的智能回收提供了一种具有实用价值的方法和途径。
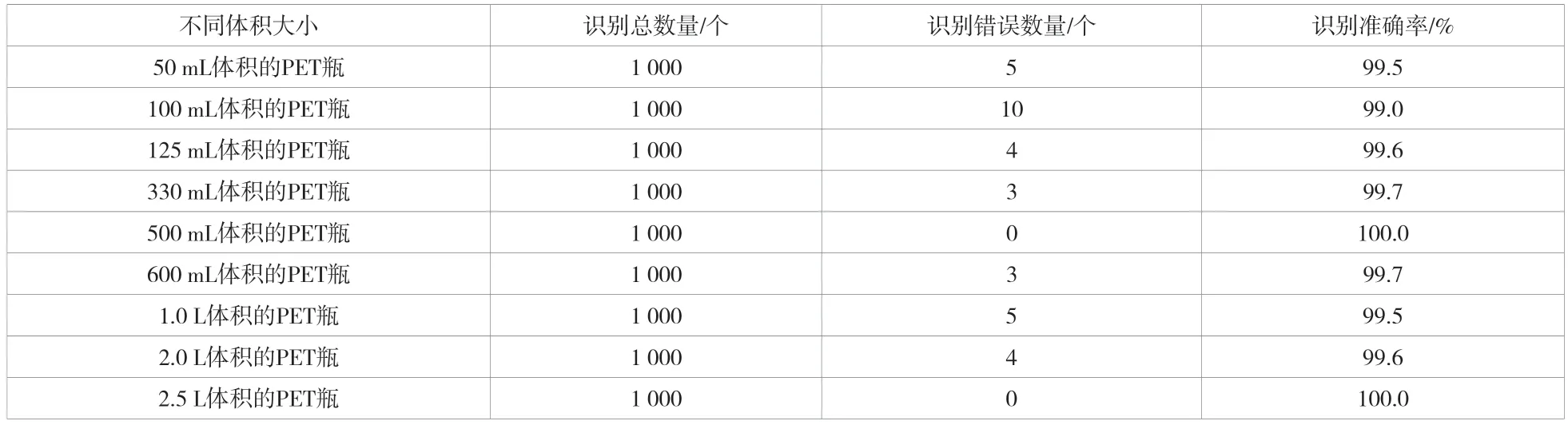
表1 不同形状体积PET瓶的Bayes分类识别结果
4 结语
作为一种塑料制品,PET瓶在饮料和矿泉水等液体包装中占有十分重要的地位。但是,不及时回收使用后的PET瓶就会造成环境污染。为了提高PET瓶的回收和二次重塑使用率,该文提出了一种基于计算机视觉技术的PET瓶回收识别方法。首先,采用计算机视觉技术中的3种滤波技术对PET瓶图像进行去噪处理。其次,采用Canny边缘检测算法获得PET瓶的准确轮廓。最后,根据Bayes算法对已经计算出体积的PET瓶进行分类识别。