基于交-直-交变频器的矿井提升机应用系统设计
2022-03-24周伯豪
周伯豪
(霍州煤电集团沁安煤电有限责任公司, 山西 霍州 031400)
引言
矿井提升机作为提高煤炭安全生产的关键设备之一,其能否安全稳定、可靠高效运行在于其控制系统设计,在各个参数控制中,尤以速度控制较为重要[1]。目前矿井提升现场大多使用异步电动机和低速直驱同步电动机,而煤矿提升作业中广泛采用低频电源交-交变频和交流绕线异步电动机串电阻调速的方法进行,但是两者难以调节电压谐波分量、能耗大、功率因数过低等问题,因此需要设计一种调速方案,其在确保驱动电流动态性能良好、抗干扰能力强的情况下,实现矿井提升机系统的高效率控制[2]。
1 煤矿提升机及其调速方式选择
为确保提升工作安全进行,煤矿提升机系统主要由主轴承、减速器、制动系统、深度指示器、主轴装置、联轴器、电动机七部分组成,具体如图1 所示。其中主轴承及其附属卷筒、基座等,主要完成负载力矩输出并达到提升物品的目的;减速器通过调节齿轮转速比,完成输出力矩的调节,从而调整提升速度;制动系统作为平稳控制执行单元停止的装置,主要由盘式制动器组成;深度指示器可以准确反映提升机当前位置;联轴器可以补偿两轴之间的偏斜量,减少运行冲击[3]。

图1 煤矿提升机系统组成
为便于对煤矿提升负载进行控制,需要使用交-直-交变频技术的调速系统,相对于其他方式,其具有以下优点[4]:主电路无须功率补偿、快速熔断等,结构简单;无功功率变换情况,功率因数较大;因不涉及无功变换,对电网造成的压降损失较小;对电网谐波不污染,不产生多余的电网谐波。特别是采用优化脉冲ARU 时,输出电压与电流的相位基本一致,功率因数可以达到1,谐波成分很低,相较于其他驱动方式有着极大的技术优势[5]。
2 系统硬件电路设计
2.1 PWM 调速原理
根据面积等效原理,利用脉冲宽度调制技术可以实现对整流电路的精确控制,如图2 所示为PWM三相整流电路。通过控制晶闸管V1~V6的开通关断状态,和滤波电容C 的大小,可以实现在不同负载RL的情况下对电压ud的平稳控制,以交流侧a 相为例,其满足以下条件[6]:


图2 PWM 三相整流电路
式中:upa为调制电压,V;ia为交流电流,A;ea为交流侧电压,V;R 为回路总电阻,Ω;L 为包括电源漏电感及滤波器电感在内的回路整体电感,H。通过调节upa的相位方向和大小,可以实现系统在整流状态、容性负载状态、逆变状态、感性负载状态等不同状态下的调节。
2.2 同步电机矢量控制原理
通过改变调制电压upa可以实现对PWM 整流器的控制,可以通过改变幅相或矢量的方式完成控制[7]。其中在煤矿等应用环境下,利用矢量控制原理进行同步电动机控制原理如图3 所示,主要分为同步电动机、速度位置处理模块、PI 调节模块、Park 逆变换模块、Clarke 逆变换模块和多电平PWM 调制模块六大部分。根据给定速度(给定频率)与实时反馈值之间的偏差得到速度偏差,根据实时位置信息,并经过PI 调节后根据转子位置电气角度进行Clarke及Park 变换,输出电流及电压偏差,并经过多电平PWM 模块调节,完成对逆变器的控制,从而驱动电动机旋转。其中在电动机转子端安装有高速旋转编码器,实现对其速度位置信息的精确测量和控制[8]。

图3 电机矢量控制原理图
2.3 全冗余矿井提升机应用控制系统设计
为实现4 500 kW 以上拖动系统的控制,驱动JKM-5.0 多绳摩擦提升机,设计如图4 所示的全冗余双电机提升机电控系统。全系统由滚筒、电动机、变频器、旋转编码器、信号传感器、电控系统等组成,在变频器1 和变频器2 的联合驱动作用下,滚筒发生转动,带动装在电动机末端的旋转编码器,从而实现对其转动速度的测量;同时在提升轨道上安装有位置信号传输装置,能够精确反映提升机的实时位置,并反馈给电控系统[9]。两台变频器互为保障,当一台出现故障时,另一台可以迅速切换至检修状态,确保系统安全平稳运行。
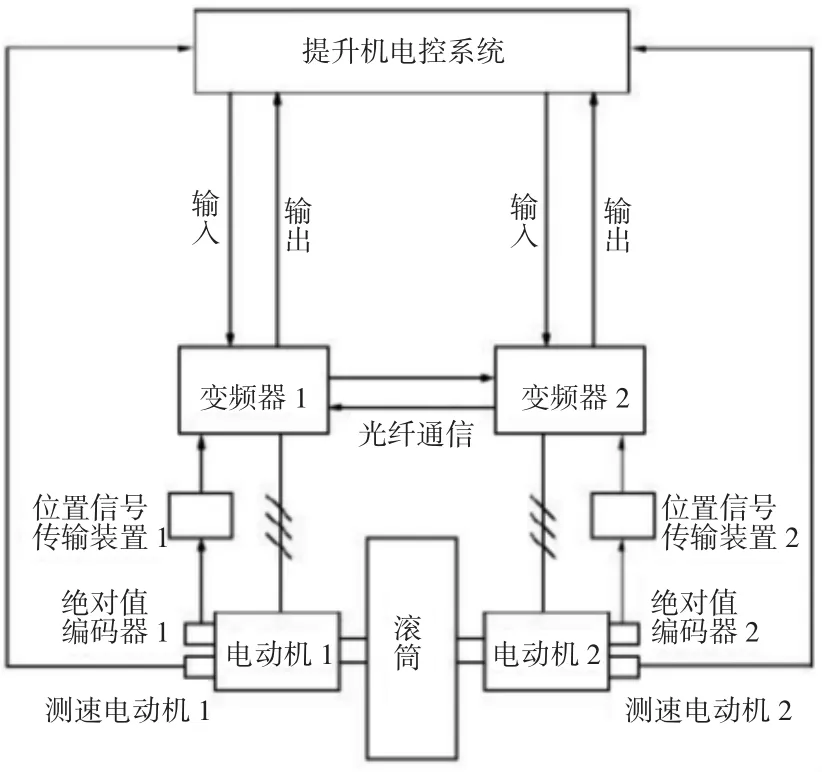
图4 全冗余矿井提升机应用控制系统电气连接图
3 软件系统设计
3.1 提升系统工作流程
为实现煤矿井下货物提升,煤矿提升机运行流程如图5 所示,当系统负载处于正常状态时,货物安装完毕后,进行电机启动加速,随后系统处于等速运行状态,稳步提升货物,持续一段时间后,开始进入减速运行状态,当提升至终点附近时,之后处于低速爬行状态,并在终点附近进行停止动作,完成停车卸载工作,并结束提升工作。不同的运输货物其速度也不相同,其中货物运输为9 m/s,人员运输为5 m/s,下长材运输为1.5 m/s,系统检修时为0.3 m/s。

图5 提升系统货物运输流程图
3.2 矢量控制系统软件功能组成
为实现对矿井提升装置提升过程的精确控制,需要完成交-直-交矢量控制系统的软件设计,其功能组成如图6 所示,主要由参数采样模块、电压模型等8 个功能区组成,其具体功能如下:
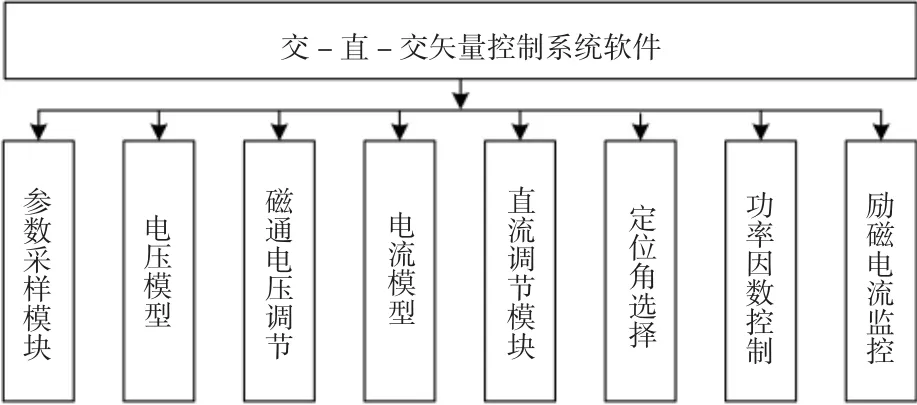
图6 交-直-交矢量控制系统软件功能组成
参数采集模块,负责完成系统实际电压、电流、位置、转速等参数测量,并将其引入控制系统;磁通电压调节模块,负责对同步电机的磁通进行闭环调节;直流调节模块,负责计算定子前馈补偿电压给定值;功率因数控制模块,负责控制系统整体功率因数,使之更接近于1;电压计算模型,负责根据参数采集模块数据完成磁通量和角度测量及观测;电流计算模型,负责计算定子电流的磁通和转矩分量等关键信息;定位角选择,负责根据不同运行状态完成最优磁通角的选择;励磁电流监控模块,确保在负载变化情况下,励磁电流不会突变为零[10]。
4 结语
为增强煤炭生产的高效性和安全性,在研究矿井提升机结构和功能的基础上,结合交-直-交变频技术采用全冗余原则,完成矿井提升机应用系统设计,并完善硬件系统配套设施和软件系统功能匹配,极大地提高了系统的全面性和抗干扰能力,拓宽了交-直-交变频技术的应用环境,具有一定的借鉴意义。